Материал: ТАУLAB
Рис. 3.24 Комплексно-частотная функция
идеального интегрирующего звена
-
Интегрирующее звено с замедлением
Передаточная функция
![]()
![]()
Создаём tf-объект для данной передаточной функции
w=tf([50],[0.02 1 0])
Transfer function:
50
-----------
0.02 s^2 + s
Построим переходную функцию командой step(w).
Построим импульсную переходную функцию командой impulse(w).
Рис. 3.25 Переходная h(t) и импульсно-переходная функции
интегрирующего звена с замедлением
Логарифмическую частотную характеристику (диаграмму Боде) получим, используя команду bode(w)
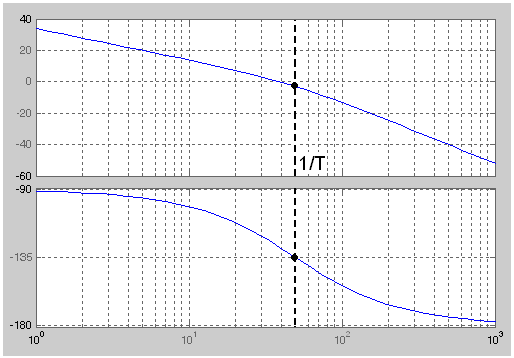
Рис. 3.26 Логарифмические частотные характеристики
интегрирующего звена с замедлением
Определим комплексно-частотную функцию (частотный годограф Найквиста), выполнив команду nyquist(w)
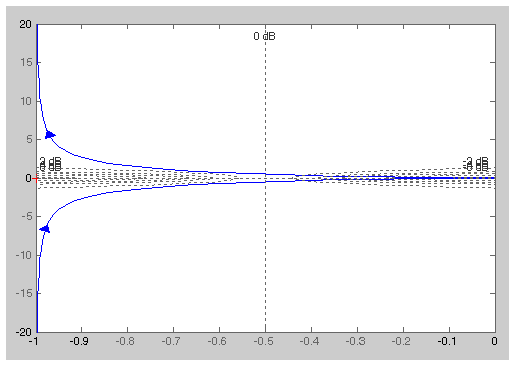
Рис. 3.27 Комплексно-частотная функция интегрирующего
звена с замедлением
-
Пропорционально-интегральное (ПИ) звено
Передаточная функция
![]()
![]()
Создаём tf-объект для данной передаточной функции
w=tf([0.04 1],[0.02 0])
Transfer function:
0.04 s + 1
---------
0.02s
Построим переходную функцию командой step(w).
Построим импульсную переходную функцию командой impulse(w).
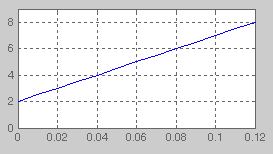
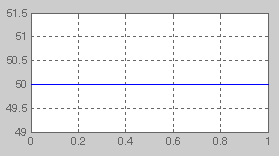
Рис. 3.28 Переходная h(t) и импульсно-переходная функция
пропорционально-интегрального звена
Логарифмическую частотную характеристику (диаграмму Боде) получим, используя команду bode(w)
Определим комплексно-частотную функцию (частотный годограф Найквиста), выполнив команду nyquist(w)
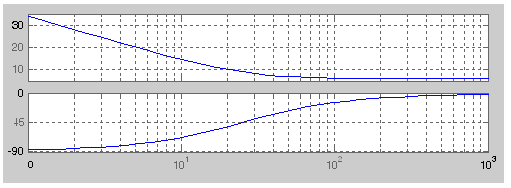
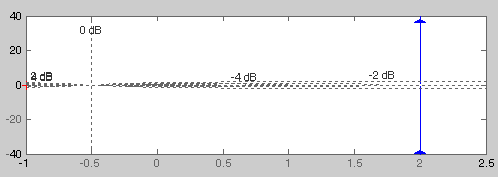
Рис. 3.29 Логарифмические частотные характеристики, комплексно-частотная функция пропорционально-интегрального звена
-
Пропорционально-дифференциальное (ПД) звено
Передаточная функция
![]()
![]()
Рассматриваются два варианта ПД-звена:
а) дифференцирующего типа
![]()
б) интегрирующего типа
![]()
Построим переходные функции командой step(w1,w2).
Построим импульсную переходную функцию командой impulse(w1,w2).
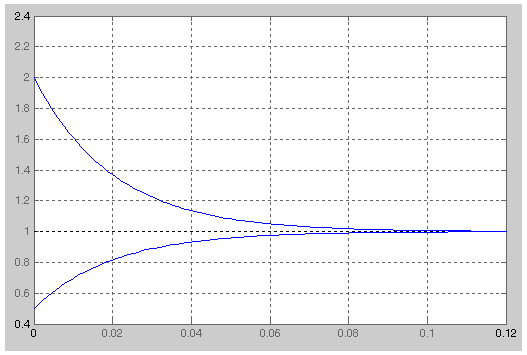
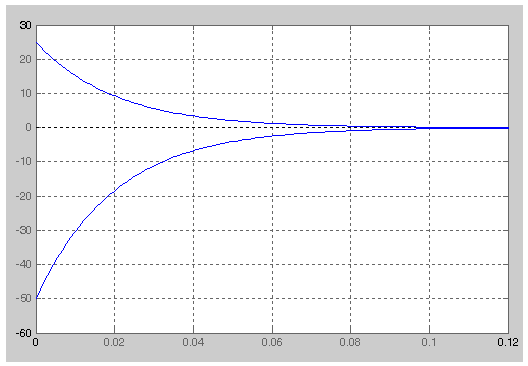
Рис. 3.30 Переходная h(t) и импульсно-переходная функция
пропорционально-дифференциального звена
Логарифмическую частотную характеристику (диаграмму Боде) получим, используя команду bode(w1,w2)
Определим комплексно-частотную функцию (частотный годограф Найквиста), выполнив команду nyquist(w1,w2)
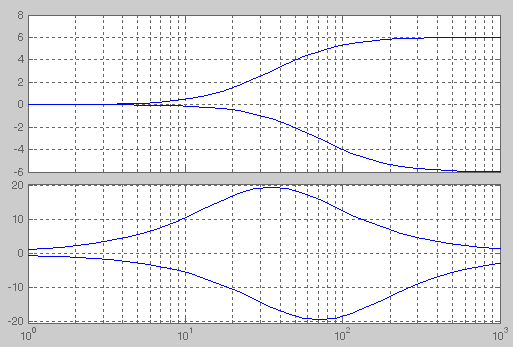
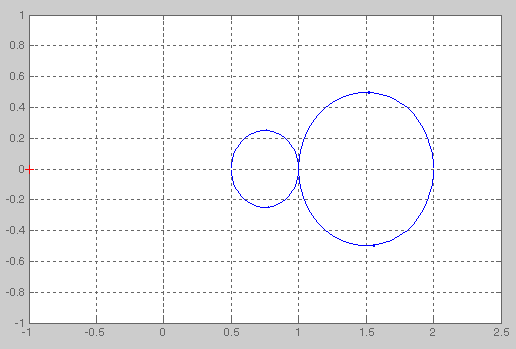
Рис. 3.31 Логарифмические частотные характеристики и комплексно-частотная функция пропорционально - дифференциального звена
-
Реальное дифференцирующее (Д) звено
Передаточная функция
![]()
![]()
Создаём tf-объект для передаточной функции консервативного звена (w)
w=tf([0.04 0],[0.02 1])
Transfer function:
0.04s
---------
0.02s + 1
Построим переходную функцию командой step(w).
Построим импульсную переходную функцию командой impulse(w).
Логарифмическую частотную характеристику (диаграмму Боде) получим, используя команду bode(w).
Определим комплексно-частотную функцию (частотный годограф Найквиста), выполнив команду nyquist(w).
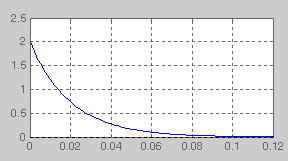
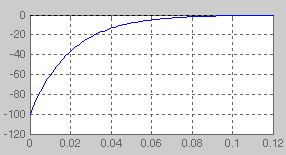
Рис. 3.32 Переходная h(t) и импульсно-переходная функция реального дифференцирующего звена
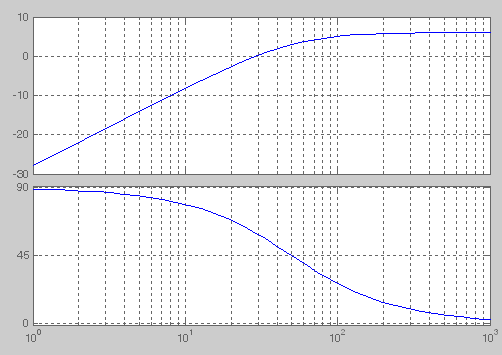
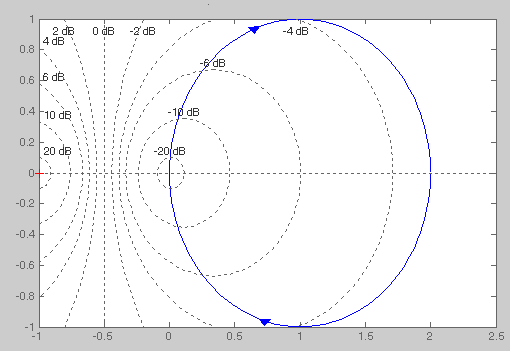
Рис. 3.33 Логарифмические частотные характеристики и комплексно-частотная функция реального дифференцирующего звена
3.6 Контрольные вопросы
-
Какие характеристики определяют свойства динамических звеньев?
-
Сравните временные характеристики типовых динамических звеньев.
-
Объясните влияние относительного коэффициента затухания колебательного звена на характер переходного процесса.
-
Объясните, на что влияет увеличение передаточного коэффициента динамического звена?
-
Объясните, каким образом можно получить передаточную функцию отдельного динамического звена.
-
На примере инерционного звена первого порядка показать, каким образом можно получить выражение переходной функции h(t) с помощью обратного преобразования Лапласа.
-
Объясните сущность амплитудной и фазовой частотных характеристик звеньев САУ.
-
Сравнить между собой частотные характеристики интегрирующих, дифференцирующих звеньев.
-
Представьте и объясните логарифмические частотные характеристики позиционных динамических звеньев.
-
Какая связь существует между передаточной функцией и амплитудно-фазовой характеристикой (годографом Найквиста) динамического звена?
-
Как определяется передаточный коэффициент динамического звена?
-
Передаточные функции звеньев и их значение.
-
Влияние интегрирующих звеньев на АФХ САУ.
-
Представить логарифмические характеристики комбинированных интегрирующих и дифференцирующих звеньев.
-
Объяснить, каким образом можно определить параметры динамического звена (Т и К), по полученным путем моделирования логарифмическим частотным характеристикам?
3. Исследование систем подчиненного регулирования с последовательной коррекцией
Целью данного раздела лабораторного практикума является усвоение методов расчёта и исследования динамических систем автоматического регулирования с последовательной коррекцией. В качестве основного метода исследования использован метод компьютерного моделирования с использованием пакета MATLAB-Simulink.
В данном разделе даны краткие теоретические сведения по построению, расчёту и исследованию систем подчинённого регулирования с последовательной коррекцией. В качестве объекта исследования рассматриваются одноконтурная и двухконтурные статическая и астатическая САР с последовательной коррекцией, представленные в трех лабораторных работах.
Выполнение лабораторного практикума по ТАУ совмещено с выполнением курсовой работы по курсу [6].Это позволяет более широко рассмотреть вопросы исследования одноконтурных и двухконтурных систем в лабораторном практикуме, а также выполнить экспериментальную часть курсовой работы посредством компьютерного моделирования. С этой целью параметры объекта исследования даются в задании на курсовую работу. Но в тоже время эти параметры могут быть заданы произвольно преподавателем.
При исследовании систем регулирования производится расчёт прямых и косвенных показателей качества. Для их получения используются временные характеристики систем, полученные методом структурного компьютерного моделирования, и аналитический расчёт переходных процессов. Косвенные показатели качества представляются по частотным характеристикам систем.
Основным методом получения временных и частотных характеристик являются методы, основанные на использовании MATLAB-Simulink. Даны основные положения по работе с указанным пакетом.
3.1 Принципы построения и работы систем подчиненного регулирования с последовательной коррекцией
В настоящее время к автоматическим системам управления, например, в автоматизированном электроприводе, предъявляются требования высокой точности регулирования и высокого быстродействия. Поэтому преимущественное применение нашёл принцип последовательной коррекции или так называемый принцип подчинённого регулирования координат. Сущность его заключается в следующем.
Объект
регулирования представляется в виде
последовательно соединённых звеньев
, выходными параметрами которых являются
регулируемые координаты. Для управления
каждой из этих координат применяется
отдельный регулятор, образующий с
объектом контур, замкнутый соответствующей
обратной связью. Регуляторы соединяются
последовательно так, что выход одного
является входом другого, т.е. каждый
внутренний контур регулирования
подчинён внешнему. В качестве примера
на рис.4.1 представлена двухконтурная
схема подчинённого регулирования,
включающая объект регулирования с
тремя постоянными времени
![]() ,
из которых наименьшей является постоянная
времени
,
из которых наименьшей является постоянная
времени
![]() .
.

Рис.4.1 Двухконтурная система подчинённого регулирования с последовательной коррекцией
Звено
с этой постоянной времени
![]() является фильтром, обеспечивающим
необходимую помехозащищённость системы,
а следовательно, её работоспособность.
является фильтром, обеспечивающим
необходимую помехозащищённость системы,
а следовательно, её работоспособность.
Регулятор
каждого контура регулирует одну выходную
координату контура и компенсирует одну
или две большие постоянные времени
объекта регулирования. На вход каждого
регулятора подаются два сигнала: сигнал,
пропорциональный заданному и
действительному значению регулируемой
величины. Передаточные функции
регуляторов выбираются таким образом,
чтобы обеспечить оптимальность контура
регулирования. Такую коррекцию называют
последовательной. При включении
регулятора последовательно со звеном
с большой постоянной времени, последняя
компенсируется и вводится взамен её
существенно меньшая постоянная времени
![]() интегрирующего звена, что обеспечивает
повышение точности регулирования и
быстродействия контура. Наименьшая
постоянная времени объекта регулирования
интегрирующего звена, что обеспечивает
повышение точности регулирования и
быстродействия контура. Наименьшая
постоянная времени объекта регулирования
![]() при этом не компенсируется.
при этом не компенсируется.
Следовательно, передаточная функция разомкнутого контура приобретает вид [6]
![]() .
(4.1)
.
(4.1)
Для замкнутого контура
![]() ,
(4.2)
,
(4.2)
где
![]() -
постоянная времени интегрирования
контура.
-
постоянная времени интегрирования
контура.
Таким образом, внутренний замкнутый контур будет представлять из себя колебательное звено.
Собственная частота контура будет равна
![]() .
(4.3)
.
(4.3)
Коэффициент демпфирования
![]() .
(4.4)
.
(4.4)
Следовательно, характер переходного процесса определяется соотношением постоянных времени
![]() .
.
Если
принять
![]() ,
то получим коэффициент демпфирования
,
то получим коэффициент демпфирования
![]() ,
,
что
обеспечивает оптимальный переходный
процесс системы второго порядка с
перерегулированием
![]() ,
,
![]() .
Такую настройку называют оптимальной
по техническому или модульному оптимуму.
.
Такую настройку называют оптимальной
по техническому или модульному оптимуму.
Передаточные функции внутреннего контура, оптимизированного по модульному оптимуму, будут иметь вид:
![]() (4.5)
(4.5)
![]() (4.6)
(4.6)