Материал: ТАУLAB
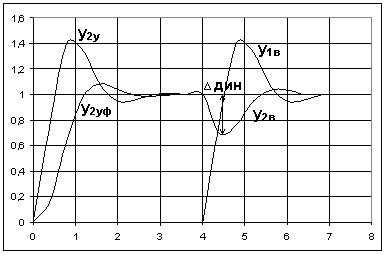
Рис. 6.12 Переходные процессы при возмущающем воздействии
-
Частотный анализ двухконтурной астатической САР с использованием пакета MATLAB.
-
Построение ЛАЧХ и ЛФЧХ разомкнутых систем САР по управляющему воздействию
Логарифмические частотные характеристики (диаграммы Боде) могут быть получены с использованием пакета MATLAB.
В соответствии с этими методами предварительно составляется передаточная функция разомкнутой САР для выходной величины y1 и y2 при задающем и возмущающем воздействиях. Для этого используются структурные схемы САР, представленные на рис. 6.1 и 6.3.
Логарифмические частотные характеристики САР при управляющем воздействии имеют следующий вид. Рассматривается пример САР со следующими исходными данными: Tμ=0.08c, T01=0.16c, T02=0.88c, Kф=9, K0=4.
Для выходной величины внешнего контура y2:
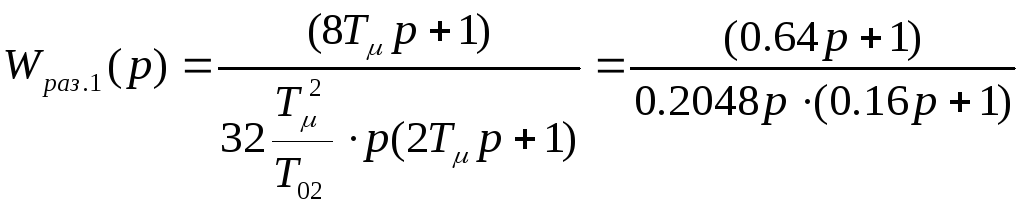
- для схемы без фильтра
![]() (6.12)
(6.12)
- для схемы с фильтром
![]() (6.13)
(6.13)
Для выходной величины y1 внутреннего контура:
- для схемы без фильтра
 (6.14)
(6.14)
- для схемы с фильтром
![]() (6.15)
(6.15)
Расчёт логарифмических частотных характеристик с использованием пакета MATLAB производится в следующем порядке.
Для выходной величины внешнего контура создадим LTI- объект:
>> w1=tf([0.64 1],[0.0327 0.2048 0 0]) (без фильтра)
Transfer function:
0.64 s + 1
-----------------------
0.0327 s^3 + 0.2048 s^2
>> w2=tf([1],[0.0327 0.2048 0.64 1]) (с фильтром)
Transfer function:
1
------------------------------------
0.0327 s^3 + 0.2048 s^2 + 0.64 s + 1
>>bode(w1,w2)
Для выходной величины внутреннего контура создадим LTI-объект
>> w3=tf([0.5632 1],[0.0327 0.2048 0 ]) (без фильтра)
Transfer function:
0.5632 s + 1
---------------------
0.0327 s^2 + 0.2048 s
>> w4=tf([0.88 0],[0.0327 0.2048 0.64 1 ]) (с фильтром)
Transfer function:
0.88 s
------------------------------------
0.0327 s^3 + 0.2048 s^2 + 0.64 s + 1
>> bode(w3,w4)
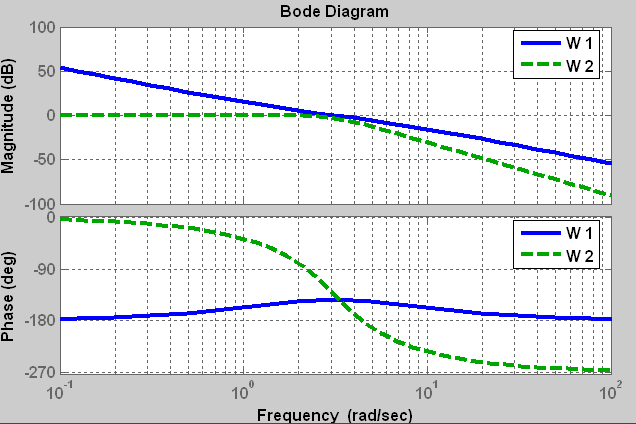
Рис. 6.13 ЛАЧХ и ЛФЧХ разомкнутых систем САР по
управляющему воздействию для внешнего контура
Для выходной величины внутреннего контура
![]() (6.16)
(6.16)
Для системы с минимальными показателями колебательности
![]() (6.17)
(6.17)
Расчёт ЛАЧХ и ЛФЧХ производится в следующем порядке.
Для выходной величины внешнего контура создадим LTI- объект
>> w2=tf([1],[0.0327 0.2048 0.64 1]) (с фильтром)
Transfer function:
1
------------------------------------
0.0327 s^3 + 0.2048 s^2 + 0.64 s + 1
>> w5=tf([1],[0.88 0]) (без фильтра)
Transfer function:
1
------
0.88 s
>> bode(w2,w5)
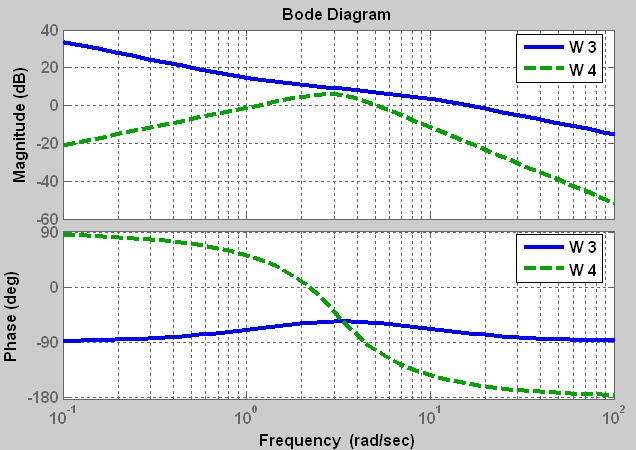
Рис. 6.14 ЛАЧХ и ЛФЧХ разомкнутых систем САР по
управляющему воздействию для внутреннего контура
Для выходной величины внутреннего контура создадим LTI- объект
>> w4=tf([0.88 0],[0.0327 0.2048 0.64 1 ]) (с фильтром)
Transfer function:
0.88 s
------------------------------------
0.0327 s^3 + 0.2048 s^2 + 0.64 s + 1
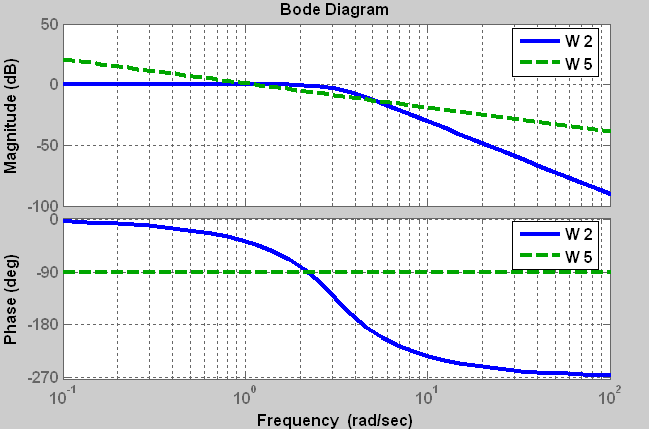
Рис. 6.15 ЛАЧХ и ЛФЧХ разомкнутой САР по возмущающему
воздействию для внешнего контура
>> w6=tf([0.64 1],[0.0327 0.2048 0 0]) (без фильтра)
Transfer function:
0.64 s + 1
-----------------------
0.0327 s^3 + 0.2048 s^2
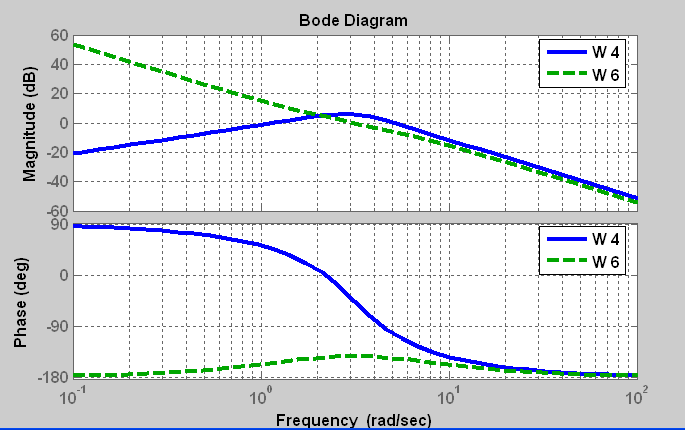
Рис. 6.16 ЛАЧХ и ЛФЧХ разомкнутой САР по возмущающему
воздействию для внутреннего контура
Для системы с минимальным показателем колебательности создадим LTI – объект
>> w7=tf([0.64 1],[0.0262 0.1638 0 0])
Transfer function:
0.64 s + 1
-----------------------
0.0262 s^3 + 0.1638 s^2
>>
-
Построить асимптотические ЛАЧХ и ЛФЧХ двухконтурной астатической САР, настроенной по симметричному оптимуму. Определить частотные показатели качества системы регулирования.
-
Определить прямые и косвенные показатели качества САР при управляющем воздействиях, при наличии и отсутствии фильтра на входе САР, при обеспечении минимального показателя колебательности.
Полученные показатели качества представить в виде таблицы 6.3
Пакет MATLAB позволяет по ЛАЧХ определить запас по фазе и запас по амплитуде, на рис. 6.18 показан пример определения запаса по фазе. Это осуществляется следующим образом после построения ЛАЧХ:
-
по белому полю нажать правую кнопку мыши и выбрать
Charactristics \ all stability margins
поставить галочки на против каждой строчки и получим запас по амплитуде и фазе.
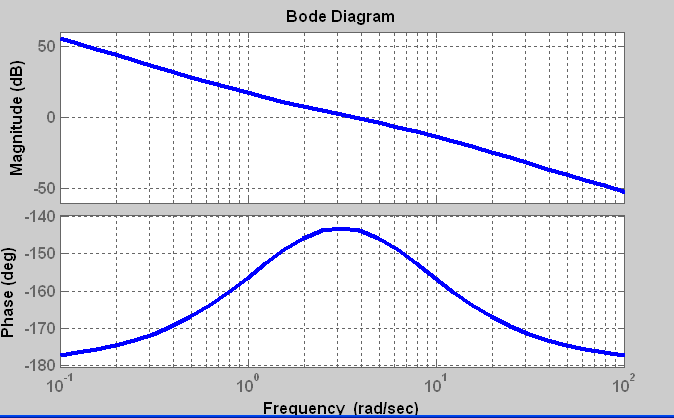
Рис. 6.17 ЛАЧХ и ЛФЧХ разомкнутой САР с минимальным
показателем колебательности
Таблица 6.3. Показатели качества асимптотической САР
|
|
Координата |
Реакция на задающее воздействие |
Реакция на возмущающее воздействие |
||||||||
|
% |
с |
|
|
|
% |
с |
|
|
|
||
|
САР без фильтра
|
y2 y1 |
|
|
|
|
|
|
|
|
|
|
|
САР с фильтром |
y2ф y1ф |
|
|
|
|
|
|
|
|
|
|
|
САР с min колебател |
y2м y1м |
|
|
|
|
|
|
|
|
|
|
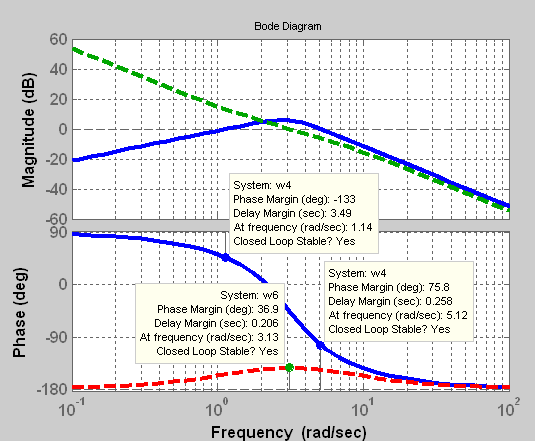
Рис. 6.18 Определение запаса по фазе
Выявить связь между прямыми показателями качества и частотными характеристиками.
Сделать выводы по работе.
Контрольные вопросы
-
Что понимают под оптимальной ситстемой автоматического регулирования?
-
В чем заключается сущность технического или модульного оптимума систем регулирования?
-
От чего зависит тип регулятора?
-
Какой вид имеют частотные характеристики системы, настроенной по модульному оптимуму?
-
Как влияет порядок системы регулирования на переходного процесса?
-
Каким образом с помощью регулятора, компенсируются большие постоянные времени объекта регулирования?
-
Объяснить влияние параметров регулятора внутреннего контура на показатели переходного процесса.
-
Каким образом строятся ЛАЧХ и ЛФЧХ оптимальной системы?
-
Объяснить по частотным характеристикам понятия запаса устойчивости по амплитуде и фазе.
-
Как определить прямые и косвенные показатели качества САР?
-
Какая связь существует между прямыми и косвенными показателями качества?
-
Представьте логарифмические частотные характеристики двухконтурной статической САР.
-
Представить примерный вид переходных функций статических САР при управляющем воздействии и объяснить их.
-
Представить примерный вид переходных функций статических САР при возмущающем воздействии и объяснить их.
-
Что такое статическая ошибка САР и от чего она зависят?
-
На примере двухконтурной САР объяснить, в чём заключается достоинства и недостатки настройки на модульный оптимум?
-
В чём заключается оптимизация САР по «симметричному оптимуму»?
-
Чем обеспечивается астатизм САР по возмущающему воздействию при настройке по «симметричному оптимуму»?
-
Объяснить характер переходных процессов двухконтурной астатической САР:
-
при задающем воздействии;
-
при возмущающем воздействии.
-
-
Объяснить достоинства и недостатки систем, настроенных по «симметричному оптимуму».
-
Представить передаточные функции статических и астатических САР при управляющем и возмущающем воздействиях.
-
Для чего применяется аппроксимация внутреннего замкнутого контура САР?
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
-
Теория автоматического управления. ч.1 Теория линейных систем автоматического управления. Под. Ред. А.А. Воронова. М.: Высшая школа, 1986г – 367с.
-
Оглоблин А.Я. Линейные динамические звенья и системы автоматического регулирования. Методические указания к лабораторному практикуму – Магнитогорск, МГТУ, 2000г.
-
Дорф Р., Бишоп Р. Современные системы управления (перев. с англ. Копылова Б.И.), М.:Лаборатория базовых знаний/Юнимедиастайл 2002г-832с.
-
Дебни Дж.Б.,Харман Т.Л. Simulink 4: Секреты мастерства (перев. с англ. Симонова М.Л.) М.:Бином/Лаборатория знаний, 2003г-403с.
-
Дьяконов В. Simulink 4. Специальный справочник – СПб, Питер, 2002г – 528с.
-
Лукин А.Н. Теория автоматического управления. Методические указания к курсовой работе для студентов специальности 180400 – Магнитогорск, МГТУ, 2004г, 67с.
-
Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в МATLAB 6.0 Учебное пособие – СПб, корона, 2001, 320с.
-
Лукин А.Н. Теория автоматического управления. Учебное пособие, ГОУ ВПО “МГТУ им. Носова”, 2005. 215 с.