Материал: ТАУLAB
б) для упрощенной САР значения ЛАЧХ и ЛФЧХ будут те же.
1. Создадим LTI-объекты с именами w1 для этого выполним:
>> w1=tf([1],[0.88 0])
Transfer function:
1
------
0.88 s
2. Построим ЛАЧХ и ЛФЧХ (диаграмму Боде), используя команду bode(w1).
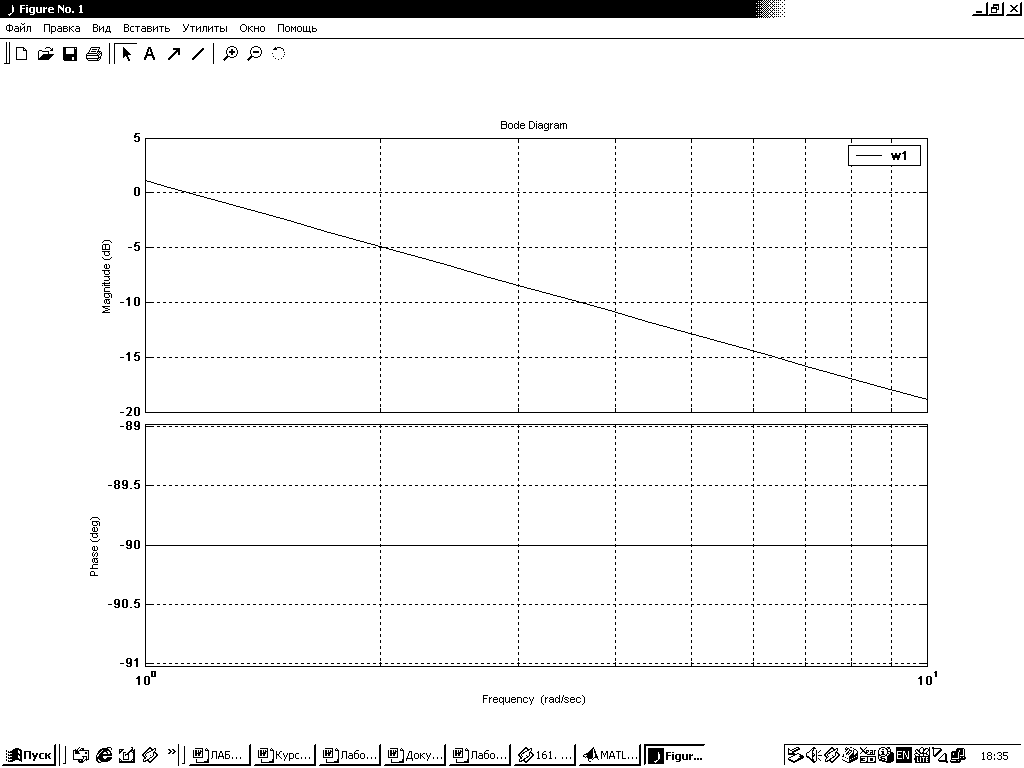
Рис. 5.11 ЛАЧХ и ЛФЧХ разомкнутой САР
по возмущающему воздействию
Передаточные функции разомкнутой САР для выходной величины внутреннего контура, имеют следующий вид:
а) внутренний контур - колебательное звено
![]()
б) для упрощенной САР:
![]()
1. Создадим LTI-объекты с именами w1, w2 для этого выполним:
>> w1=tf([1],[0.004096 0.0512 0.32 0])
Transfer function:
1
----------------------------------
0.004096 s^3 + 0.0512 s^2 + 0.32 s
>> w2=tf([1],[0.0512 0.32 0])
Transfer function:
1
-------------------
0.0512 s^2 + 0.32 s
2. Построим ЛАЧХ и ЛФЧХ (диаграмму Боде) , используя команду bode(w1,w2).
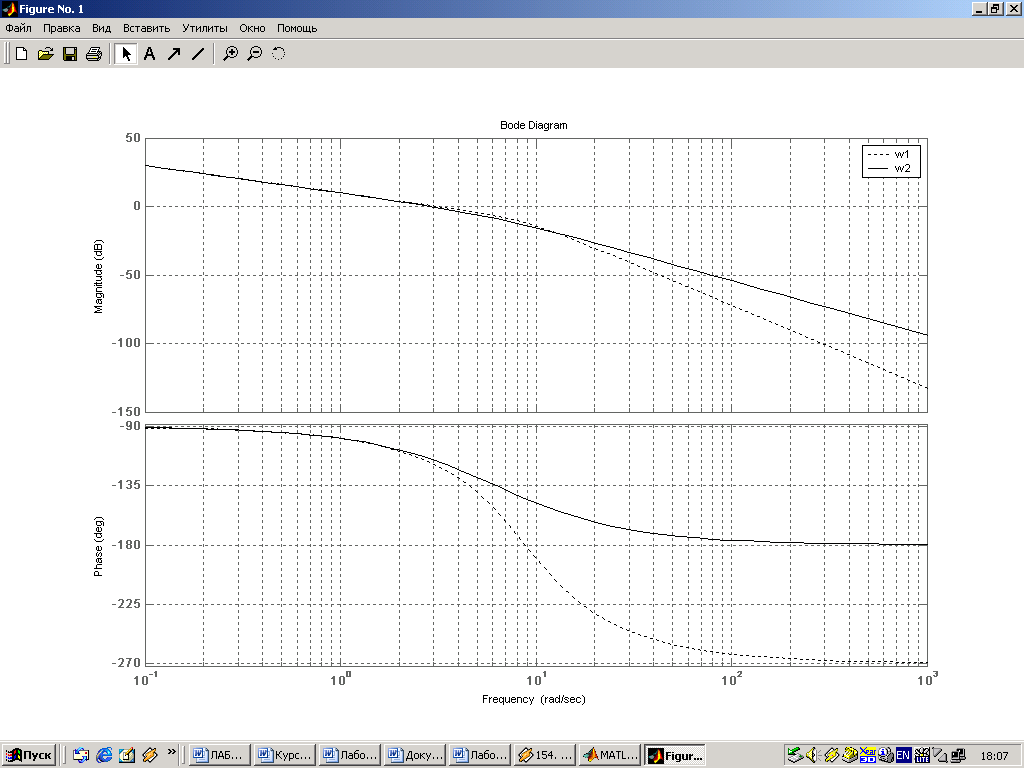
Рис. 5.12 Логарифмические частотные характеристики
(диаграмма Боде) САР при возмущающем воздействии
Вывод: выполнив работу было установлено то, что внутренний контур САР является астатическим по управляющему воздействию, т.к. регулятор внутреннего контура содержит интегрирующее звено. Регулятор же внешнего контура является пропорциональным звеном, поэтому внешний контур САР является статическим. При замене колебательного звена внутреннего контура на апериодическое звено первого порядка приводит к тому, что у системы уменьшается перерегулирование и время регулирования
-
Построить частотные характеристики САР с использованием программы MATLAB.
-
Построить передаточные функции разомкнутой и замкнутой САР при задающем и возмущающем воздействиях.
-
Построить ЛАЧХ и ЛФЧХ двухконтурной САР при задающем и возмущающем воздействиях.
-
Сделать выводы по работе.
3. Порядок выполнения лабораторной работы.
-
Теоретическая часть.
Настройка системы подчинённого регулирования на модульный оптимум позволяет получить оптимальный переходный процесс с минимальным перерегулированием с максимальным быстродействием. Кроме того, указанная настройка обеспечивает астатизм системы по задающему воздействию. Однако, в таком случае возникает статическая ошибка регулирования, зависящая от внешнего возмущающего воздействия.
Для исключения этой ошибки необходимо изменить настройку системы. Обеспечить астатизм по возмущающему воздействию можно в двукратно-интегрирующей системе, настроенной по симметричному оптимуму. Передаточная функция регулятора внешнего контура в такой системе описывается выражением:
 (6.1)
(6.1)
Внутренний замкнутый контур имеет такую же структуру и передаточную функцию как и в однократно-интегрирующей статической системе, настроенной по модульному оптимуму. Следовательно, внутренний замкнутый контур может быть аппроксимирован апериодическим звеном первого порядка с передаточной функцией:
![]() (6.2)
(6.2)
В этом случае структурная схема двухконтурной САР может быть представлена схемой на рисунке 6.1.
Передаточная функция разомкнутой двукратно-интегрирующей САР для выходной величины y2 при задающем воздействии имеет вид
 (6.3)
(6.3)
Передаточная функция замкнутой САР
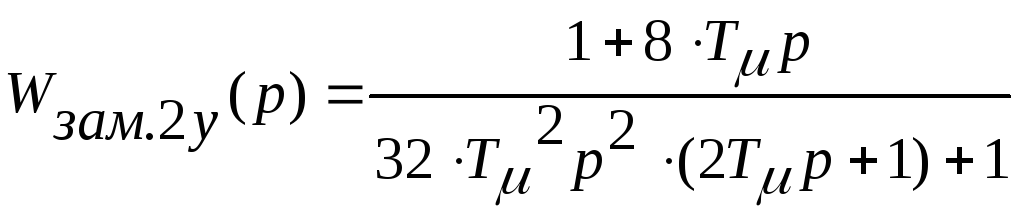 (6.4)
(6.4)
В соответствии с симметричной формой ЛАЧХ рассматриваемой системы, такой способ оптимизации получил название симметричного оптимума. При пропорционально-интегральной характеристике регулятора внешнего контура система становится двукратно-интегрирующей, обеспечивающей астатизм и по возмущающему воздействию.
Известно, что при постройке САР по симметричному оптимуму переходный процесс для выходной величины y2 при скачке задающего воздействия g=yз.2. характеризуется значительным перерегулированием, составляющим σ%=43,4%
Для улучшения динамических свойств таких систем при приложении задающего воздействия обычно на входе САР устанавливается дополнительный фильтр с передаточной функцией
![]() .
.
Структурная схема такой системы с дополнительным фильтром на входе приведена на рисунке 6.2.
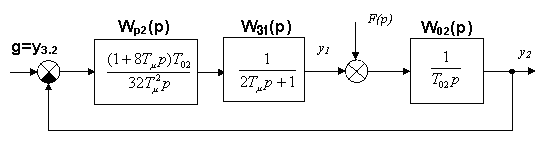
Рис. 6.1 Структурная схема системы настроенной по симметричному оптимуму без фильтра
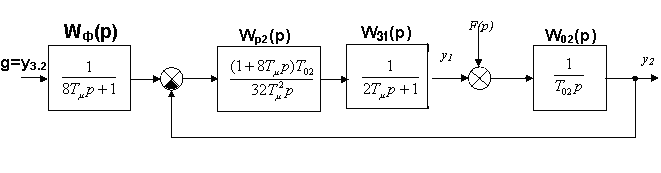
Рис. 6.2 Структурная схема системы настроенной по симметричному оптимуму с фильтром
Имеется другой вариант выбора регулятора внешнего контура, когда в системе обеспечивается минимальный показатель колебательности. В этом случае передаточная функция регулятора имеет вид
![]() .
.
-
Создание модели двухконтурной астатической САР с последовательной коррекцией.
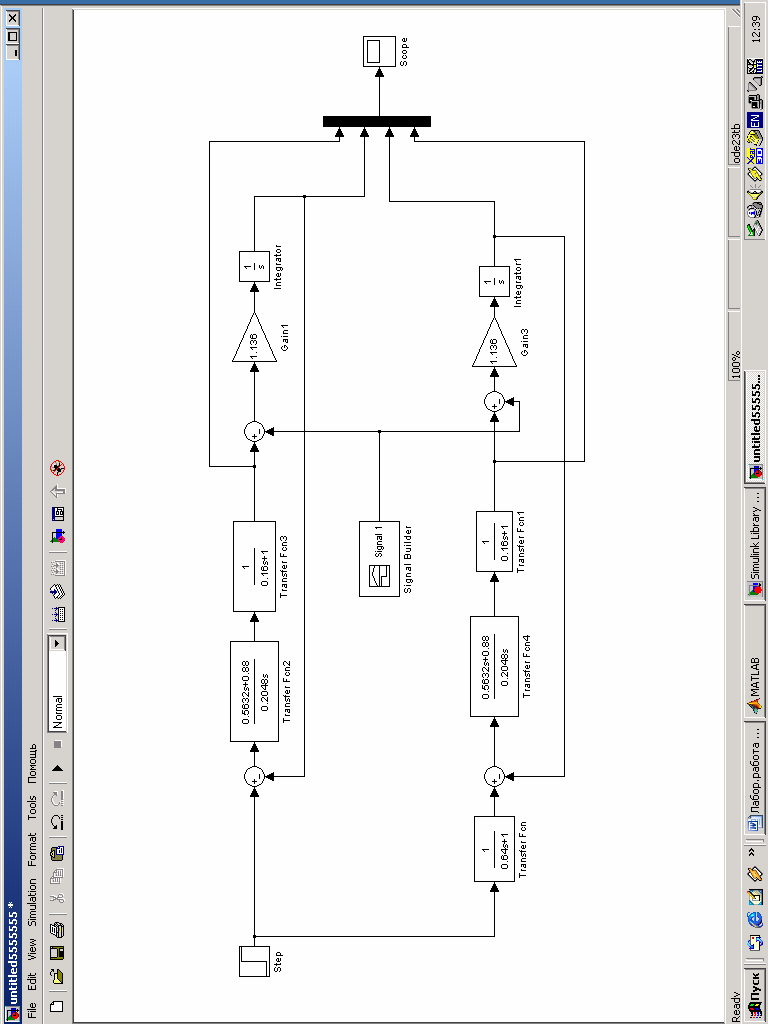
Создаются модели двухконтурной астатической САР, структурные схемы которой представлены на рис. 6.1 и 6.2. Для этого предварительно необходимо ознакомиться с общими сведениями по работе с пакетом MATLAB-Simulink и с порядком создания моделей в среде Simulink.
Параметры моделей звеньев САР устанавливаются в соответствии с параметрами структурной схемы, заданными преподавателем (см. Л.р. №4,5), либо заданным в задании на курсовую работу по ТАУ.
Представленная модель (рис.6.3) позволяет исследовать два варианта двухконтурной САР:
а) при отсутствии фильтра на входе САР;
б) при наличии фильтра на входе САР.
-
Расчёт переходных процессов САР по методу структурного моделирования
|
Рис 6.3 Структурная схема модели двухконтурной астатической САР |
Расчёт переходных процессов в САР при оптимальной настройке регулятора производится при задающем g=1, воздействях для выходных величин:
-
y1 и y2 для системы без фильтра;
-
y1ф и y2ф для системы с фильтром на входе САР.
В связи с тем, что фильтр не оказывает влияние на реакцию системы при возмущающем воздействии, поэтому в данном случае переходный процесс рассматривается для выходных величин y1в и y2в.
Схема модели САР в этом случае будет иметь вид, представленный на рис. 6.3
Перед выполнением расчетов необходимо предварительно задать параметры расчета. Задание параметров расчета выполняется в панели управления меню Simulation/Configuration Parameters.
Для получения переходных процессов при управляющем воздействии необходимо установить конечное время равное 50Tμ (в данном примере 4 секунды)
Остальные параметры установить согласно рис. 6.4.
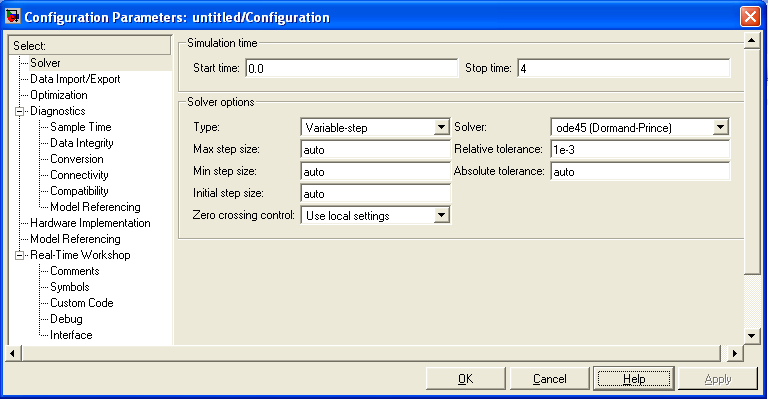
Рис 6.4 Параметры расчёта
Для формирования возмущающего воздействия используем блок Signal Builder. Время наброса нагрузки 50Tμ (в данном примере 50Tμ=4 с), конечное время 90Tμ (в данном примере 90Tμ=7,2 с), амплитуда возмущающего сигнала равна единице. С учётом всех этих параметров блок Signal Builder будет выглядеть так, как показано на рисунке 6.5.
Дважды щёлкнув по осциллографу (Scope) получаем следующие переходные функции по управляющему воздействию (Tк = 50Tμ) рис. 6.6.
Чтобы получить переходную функцию при возмущающем воздействии необходимо в меню Simulation/Configuration Parameters конечное время установить равное Tk = 90Tμ. Получаем переходные функции, представленные на рис. 6.7.
Необходимо исследовать и другой вариант настройки регулятора, обеспечивающей минимальный показатель колебательности. В этом случае передаточная функция регулятора внешнего контура имеет вид
![]() (6.5)
(6.5)
Для исследования системы с «минимальным показателем колебательности» необходимо немного изменить вышеприведённую структурную схему. После корректировки она будет иметь вид, представленный на
рис 6.8.
Дальнейший порядок действий такой же как и в предыдущем случае. Сначала необходимо снять переходные процессы при управляющем воздействии (Tк = 50Tμ), а затем при возмущающем воздействии (Tk = 90Tμ). Получим переходные процессы, представленные на рисунках 6.9 и 6.10.
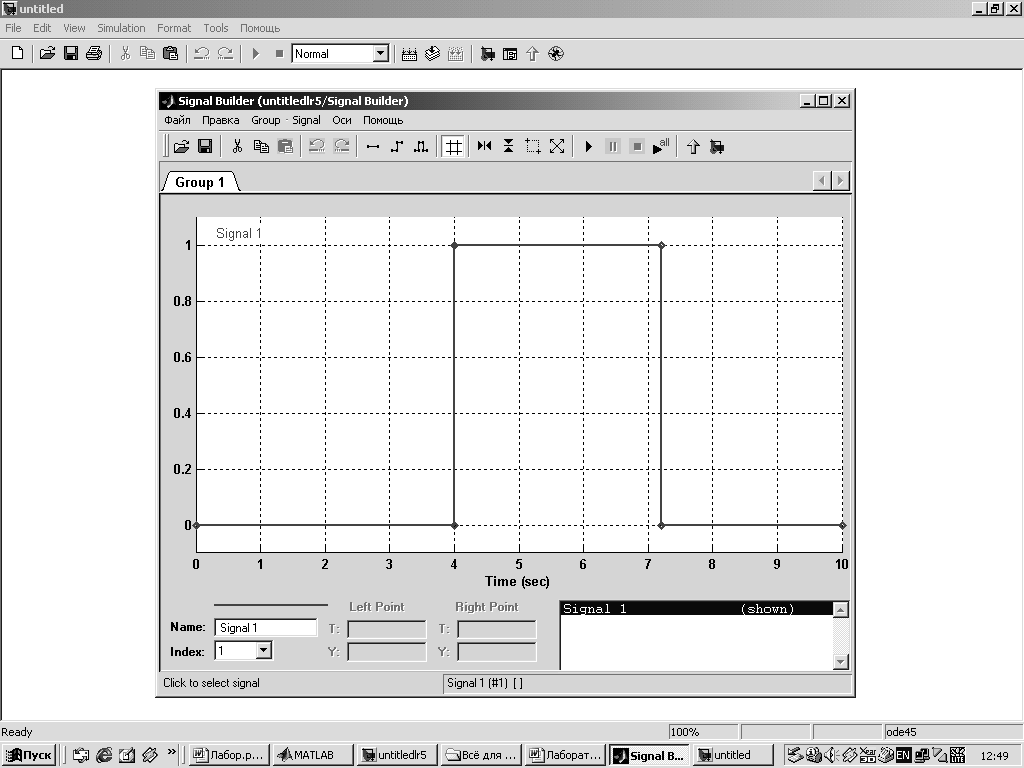
Рис. 6.5 Параметры блока Signal Builder
-
Аналитический расчет переходных процессов
Выражения для переходных функций могут быть получены [6] с помощью обратного преобразования Лапласа.
Переходная функция по управляющему воздействию системы, когда выходной величиной является выход внешнего контура, без фильтра имеет вид:
![]() (6.6)
(6.6)
и с фильтром:
 (6.7)
(6.7)
Переходная функция по управляющему воздействию, когда выходной величиной является выход внутреннего контура, имеет вид:
![]()
 ;
(6.8)
;
(6.8)
с фильтром:
![]()
 .
(6.9)
.
(6.9)
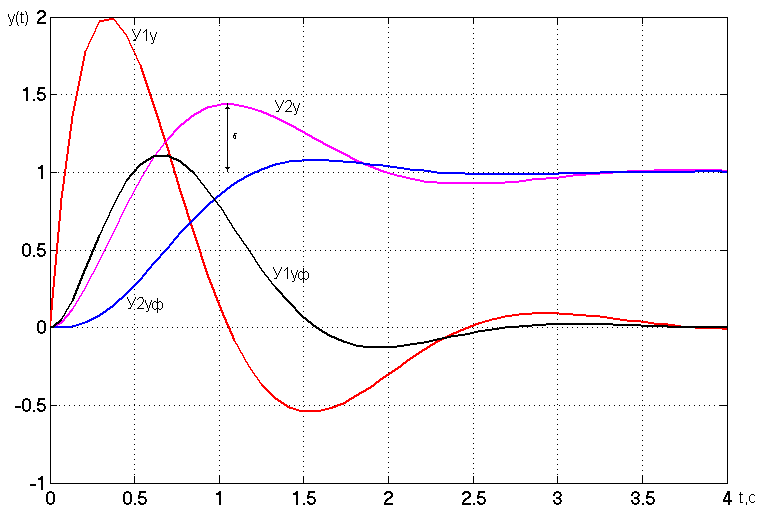
Рис. 6.6 Переходные функции при управляющем воздействии
Результаты
аналитических расчетов переходных
процессов при
![]() с.
представлены в таблице 6.1
с.
представлены в таблице 6.1
Таблица 6.1 Расчетные данные переходных процессов по управляющему воздействию
|
T |
0 |
0,4 |
0,8 |
1,2 |
1,6 |
2 |
2,4 |
2,8 |
3,2 |
3,6 |
4 |
|
y2y |
0 |
0,784 |
1,4 |
1,33 |
1,07 |
0,95 |
0,95 |
0,99 |
1,01 |
1,007 |
1,001 |
|
y2yф |
0 |
0,168 |
0,64 |
0,995 |
1,081 |
1,037 |
0,99 |
0,986 |
0,995 |
1,001 |
1,002 |
|
y1y |
0 |
2,154 |
0,464 |
-0,56 |
-0,46 |
-0,08 |
0,085 |
0,067 |
0,01 |
-0,01 |
-0,01 |
|
y1yф |
0 |
0,848 |
1,04 |
0,458 |
-0,01 |
-0,12 |
-0,05 |
0,01 |
0,021 |
0,007 |
-0,001 |

Рис. 6.7. Переходные функции при возмущающем воздействии
|
Рис. 6.8 Структурная схема для моделирования переходных процессов с «минимальным показателем колебательности»
|
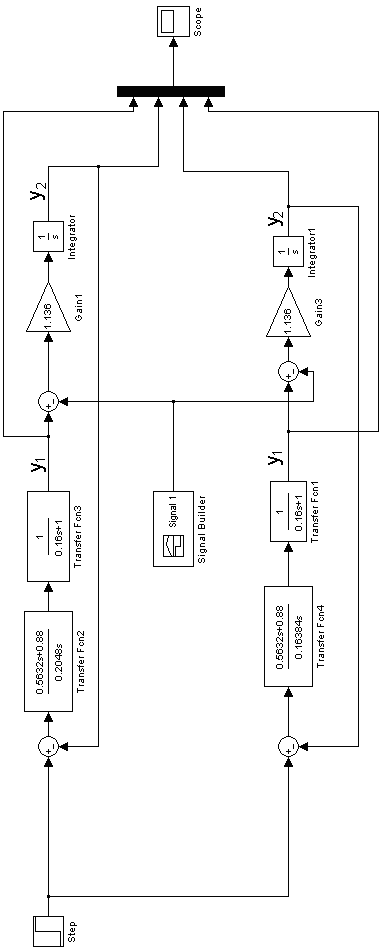
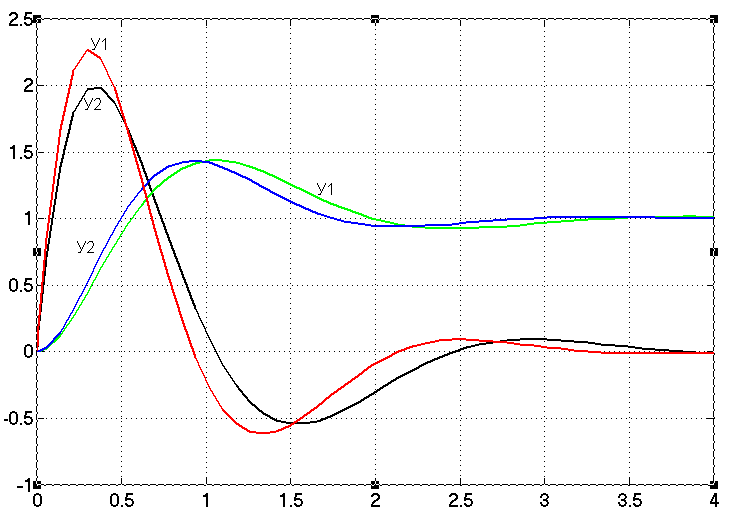
Рис. 6.9. Переходные функции при управляющем воздействии
с «меньшим показателем колебательности»
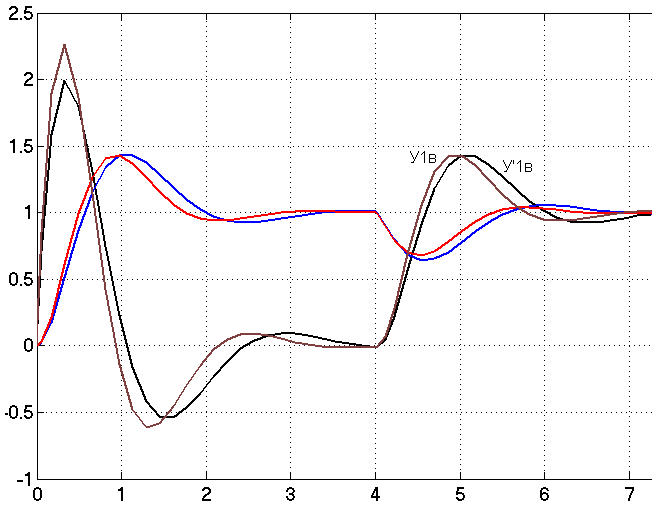
Рис. 6.10. Переходные функции при возмущающем воздействии с «меньшим показателем колебательности»
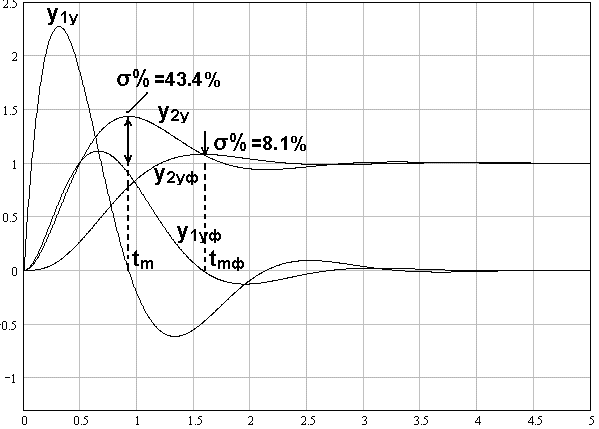
Рис. 6.11. Переходные процессы при управляющем воздействии
Передаточная функция по возмущению будет одинаковой как для системы с фильтром, так и для системы без фильтра, т.к. фильтр не влияет на систему при возмущающем воздействии. Это справедливо как для внешнего, так и для внутреннего контуров.
Переходная функция по возмущающему воздействию, когда выходной величиной является выход внешнего контура, имеет вид:
 (6.10)
(6.10)
Переходная функция по возмущающему воздействию, когда выходной величиной является выход внешнего контура, имеет вид:
 (6.11)
(6.11)
Расчеты переходных процессов по возмущающему воздействию представлены в таблице 6.2.
Таблица 6.2 Расчеты переходных процессов по возмущающему
воздействию
|
t |
4 |
4,4 |
4,8 |
5,2 |
5,6 |
6 |
6,4 |
6,8 |
7,2 |
|
y2в |
1 |
0,69 |
0,762 |
0,945 |
1,034 |
1,031 |
1,005 |
0,994 |
1 |
|
y1в |
0 |
0,784 |
1,403 |
1,329 |
1,068 |
0,945 |
0,955 |
0,993 |
1 |