Материал: ТАУLAB
-
Изучить теоретические сведения.
-
Запустить систему MATLAB.
-
Создать tf-объект, в соответствии с заданным вариантом.
-
Определить полюса передаточной функции
 с
использованием команды roots или pole.
с
использованием команды roots или pole.
-
Определить нули передаточной функции
 с
использованием команды roots или zero.
с
использованием команды roots или zero.
-
Используя LTI-viewer, или соответствующие команды (табл.2.1) получить динамические характеристики – переходную функцию h(t), импульсно-переходную функцию w(t) и частотные характеристики – диаграмму Боде, частотный годограф Найквиста.
-
Исследование динамических свойств контура регулирования на MATLAB при изменении постоянной времени обратной связи регулятора.
Имея передаточные функции разомкнутой и замкнутой САР (рассчитаны выше аналитическим способом), построим ЛАЧХ и ЛФЧХ разомкнутой и замкнутой САР.

ЛАЧХ и ЛФЧХ разомкнутой САР
Для первого случая:
![]()
Для второго случая (аналогично первому):
![]()
Для третьего случая:
![]() Порядок
действий:
Порядок
действий:
-
Создадим LTI-объекты с именами w1, w2, w3, для этого выполним:
>> w1=tf([1],[0.0128 0.16 0])
Transfer function:
1
-------------------
0.0128 s^2 + 0.16 s
>> w2=tf([1],[0.0064 0.08 0])
Transfer function:
1
-------------------
0.0064 s^2 + 0.08 s
>> w3=tf([1],[0.0256 0.32 0])
Transfer function:
1
-------------------
0.0256 s^2 + 0.32 s
>>
-
Построим импульсную переходную функцию командой impulse(w1,w2,w3).
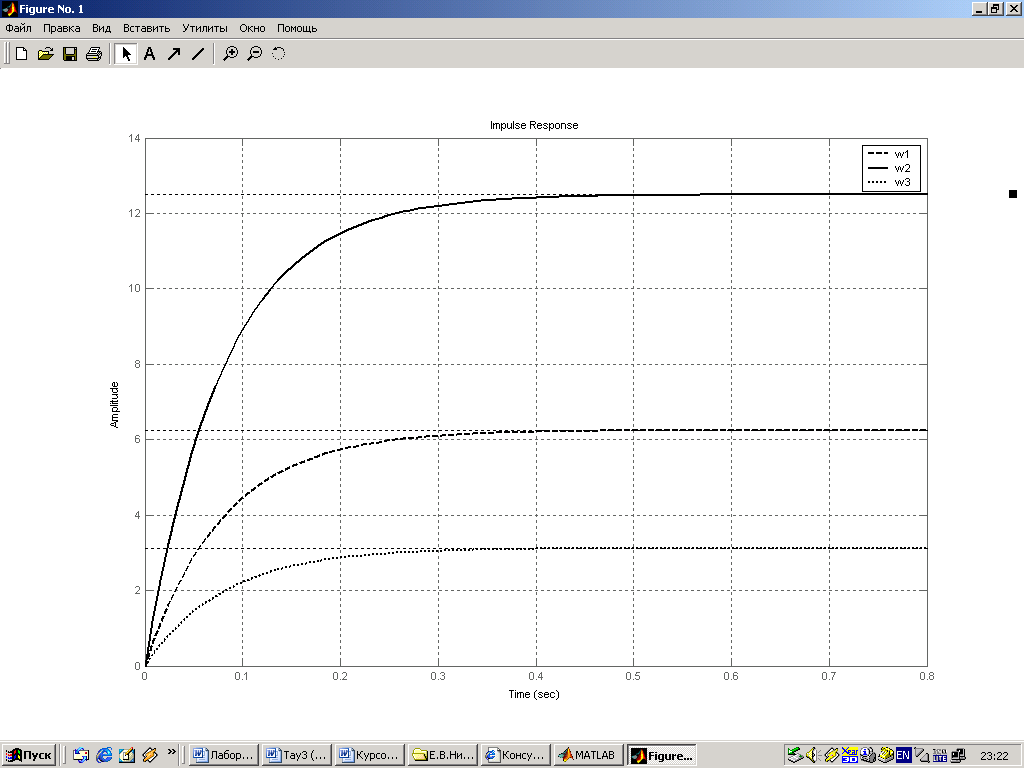
Рис. 4.8 Импульсная переходная функция разомкнутой САР при изменении постоянной времени интегрирования регулятора
-
Построим ЛАЧХ и ЛФЧХ (диаграмму Боде), используя команду bode(w1,w2,w3).
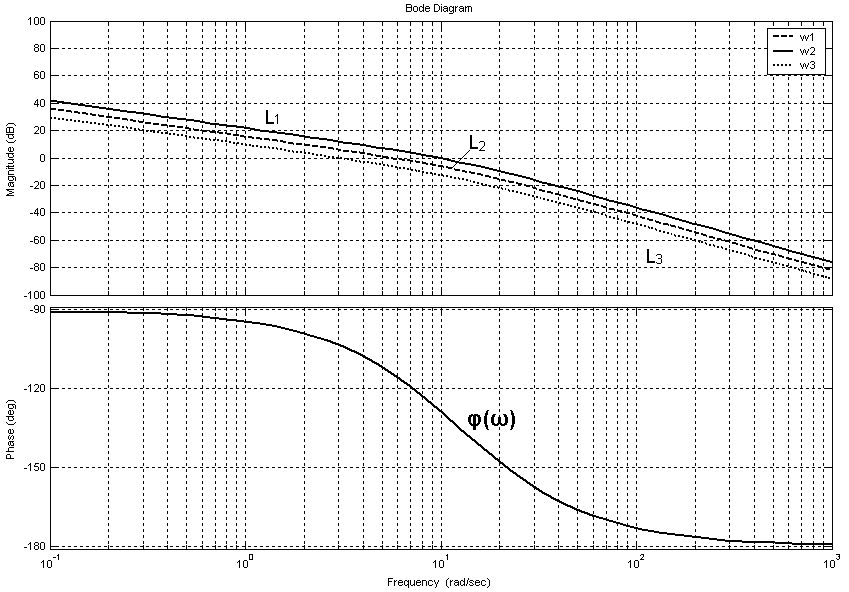
Рис. 4.9 ЛАЧХ и ЛФЧХ разомкнутой САР при изменении постоянной времени обратной связи регулятора
-
Определим частотный годограф Найквиста, выполнив команду nyquist(w1,w2,w3)
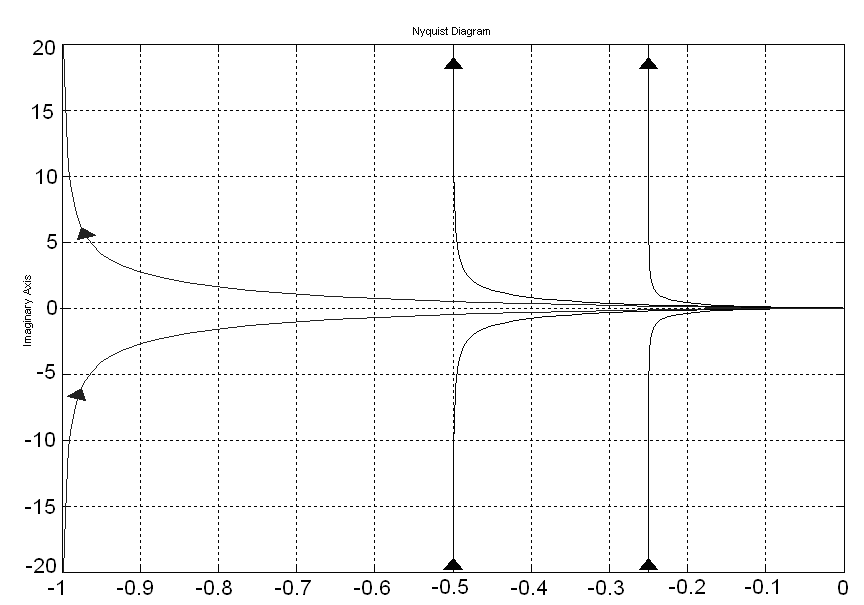
Рис. 4.10 Частотный годограф Найквиста разомкнутой САР при изменении постоянной времени обратной связи регулятора
ЛАЧХ и ЛФЧХ замкнутой САР.
Для первого случая:
![]()
где
T
= =0,113
с, а
=0,113
с, а
![]() =0,707.
=0,707.
Для второго случая (аналогично первому):
![]()
где
T
=![]() =0,08
с, а
=0,08
с, а
![]() =0,5.
=0,5.
Для третьего случая:
![]()
где
T
=2![]() =0,16
с, а
=0,16
с, а
![]() .
.
Порядок действия аналогичен предыдущему для разомкнутой САР.
1. Создадим LTI-объекты с именами w1, w2, w3, для этого выполним:
>> w1=tf([1],[0.0128 0.16 1])
Transfer function:
1
-----------------------
0.0128 s^2 + 0.16 s + 1
>> w2=tf([1],[0.0064 0.08 1])
Transfer function:
1
-----------------------
0.0064 s^2 + 0.08 s + 1
>> w3=tf([1],[0.0256 0.32 1])
Transfer function:
1
-----------------------
0.0256 s^2 + 0.32 s + 1
>>
2. Построим ЛАЧХ и ЛФЧХ (диаграмму Боде), используя команду bode(w1,w2,w3).
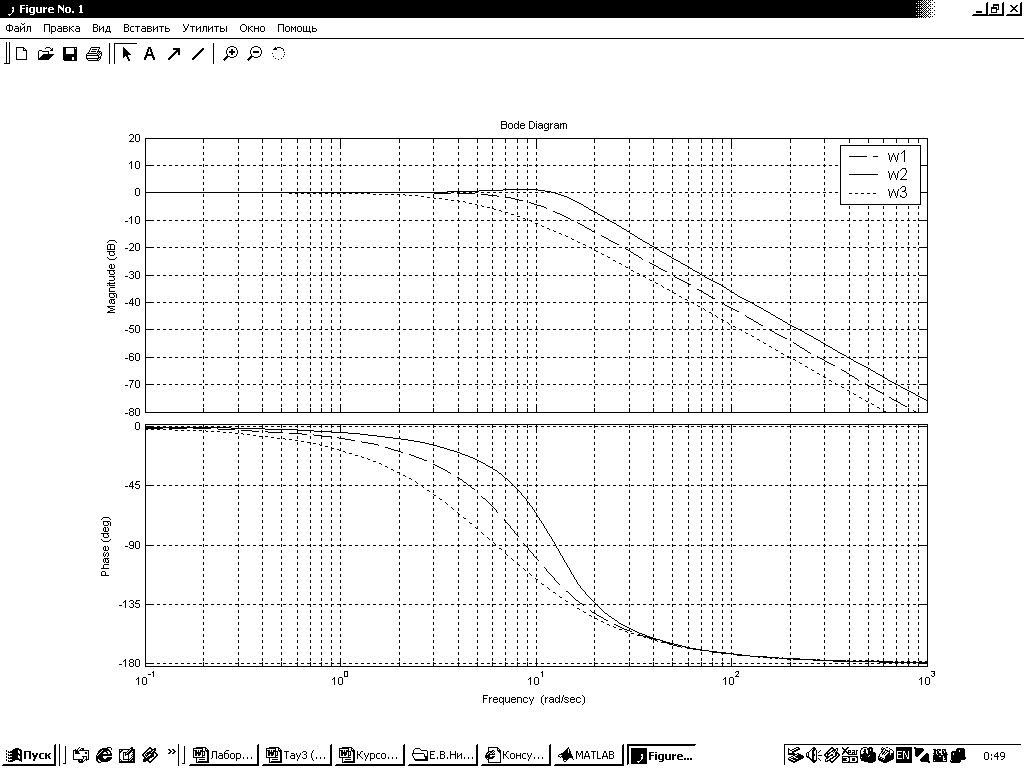
Рис. 4.11 ЛАЧХ и ЛФЧХ замкнутой САР при изменении
постоянной времени обратной связи регулятора
-
Исследование динамических свойств контура регулирования на MATLAB при изменении постоянной времени интегрирования регулятора Tр1.
Имея передаточные функции разомкнутой и замкнутой САР (рассчитаны выше аналитическим способом), построим ЛАЧХ и ЛФЧХ разомкнутой и замкнутой САР.
Будем исследовать САР для трех случаев:
 при
при
![]()
ЛАЧХ и ЛФЧХ разомкнутой САР
Для первого случая:
![]()
Для второго случая:
![]()
Для третьего случая:
![]() Порядок
действия:
Порядок
действия:
-
Создадим LTI-объекты с именами w1, w2, w3, для этого выполним:
>> w1=tf([1],[0.0128 0.16 0])
Transfer function:
1
-------------------
0.0128 s^2 + 0.16 s
>> w2=tf([0.32 1],[0.002048 0.0384 0.16 0])
Transfer function:
0.32 s + 1
----------------------------------
0.002048 s^3 + 0.0384 s^2 + 0.16 s
>> w3=tf([0.08 1],[0.002048 0.0384 0.16 0])
Transfer function:
0.08 s + 1
----------------------------------
0.002048 s^3 + 0.0384 s^2 + 0.16 s
>>
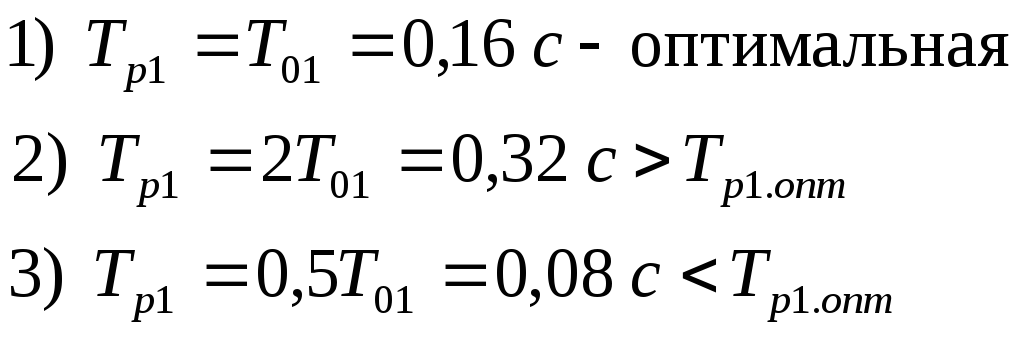
2. Построим ЛАЧХ и ЛФЧХ (диаграмму Боде), используя команду bode(w1,w2,w3).
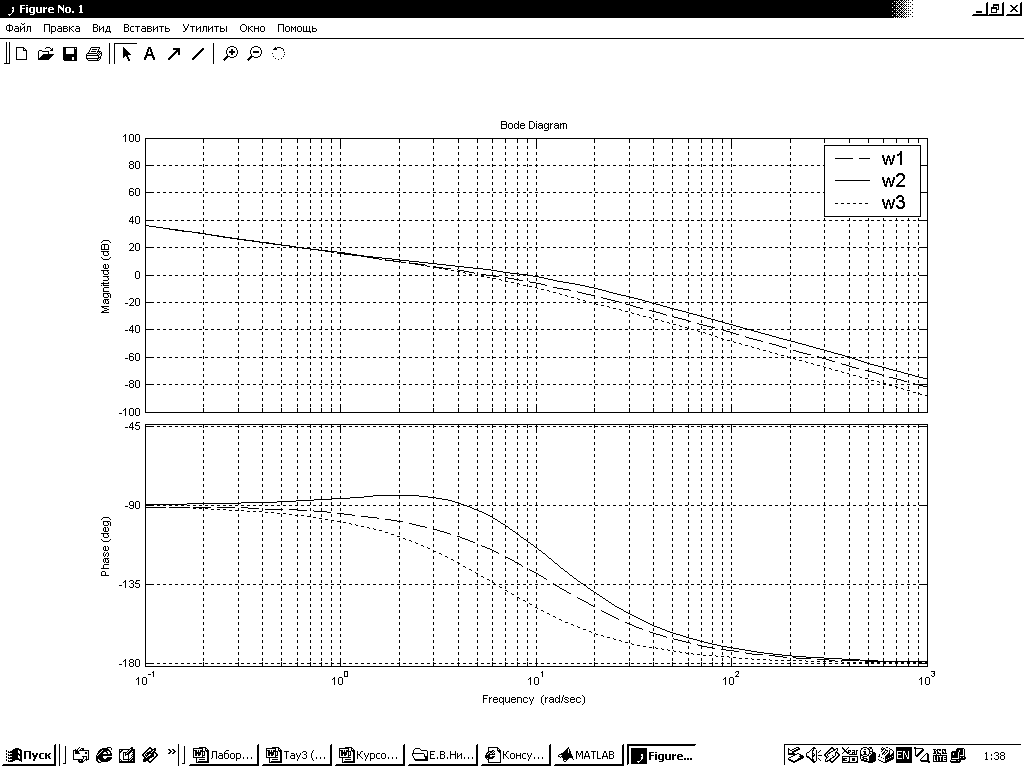
Рис. 4.12 ЛАЧХ и ЛФЧХ разомкнутой САР при изменении
постоянной времени обратной связи регулятора
ЛАЧХ и ЛФЧХ замкнутой САР.
Для первого случая:
![]()
Для второго случая:

Для третьего случая:

![]()
Порядок действия:
-
Создадим LTI-объекты с именами w1, w2, w3, для этого выполним:
>> w1=tf([1],[0.0128 0.16 1])
Transfer function:
1
-----------------------
0.0128 s^2 + 0.16 s + 1
>> w2=tf([0.32 1],[0.002048 0.0384 0.48 1])
Transfer function:
0.32 s + 1
--------------------------------------
0.002048 s^3 + 0.0384 s^2 + 0.48 s + 1
>> w3=tf([0.08 1],[0.002048 0.0384 0.24 1])
Transfer function:
0.08 s + 1
--------------------------------------
0.002048 s^3 + 0.0384 s^2 + 0.24 s + 1
>>
-
Построим ЛАЧХ и ЛФЧХ (диаграмму Боде), используя команду bode(w1,w2,w3).
Рис. 4.13 ЛАЧХ и ЛФЧХ замкнутой САР при изменении постоянной времени обратной связи регулятора
3.3 Лабораторная работа № 5 Исследование однократно интегрирующей статической сар с последовательной коррекцией
Цель работы: Исследование и изучение динамических, статических свойств и частотных характеристик САР с последовательной коррекцией. Определение основных показателей качества САР.
-
Математическое моделирование. Расчетно-экспериментальная часть.
-
Теоретическая часть. Ознакомиться с принципом составления структурной схемы двухконтурной статической системы, построенной по модульному оптимуму, с принципом составления передаточных функций САР по управляющему и возмущающему воздействиям, с методами исследования динамических систем.
-
Определение параметров структурной схемы двухконтурной статической САР.
-
Создание модели двухконтурной статической САР.
-
Исследование динамических свойств статической САР с последовательной коррекцией при управляющем и возмущающем воздействиях по методу структурного моделирования, при представлении внутреннего контура колебательным либо инерционным звеном первого порядка.
-
Аналитический расчёт переходных процессов в двухконтурных САР.
-
Частотный анализ двухконтурной САР с использованием пакета МАТLAB.
-
-
Расчетная и графическая часть. Составление отчета.
-
2.1 Представить цель и программу работы, содержание расчетно-экспериментальной части.
-
2.2 Составить структурную схему двухконтурной системы, построенной по модульному оптимуму. Определить передаточные функции регуляторов. Определить параметры звеньев САР.
-
2.3 Создать и представить модель двухконтурной оптимальной статической САР с внутренним замкнутым контуром, представленным в виде колебательного звена второго порядка и инерционного звена первого порядка.
-
2.4 Представить результаты исследования динамических свойств статической САР с последовательной коррекцией при задающем и возмущающем воздействиях (в виде графиков и таблиц).
-
2.5 Представить результаты аналитического расчета переходных процессов в двухконтурной САР.
-
2.6 По результатам исследования переходных процессов определить прямые показатели качества САР. Результаты расчетов представить в виде таблице 5.1.
Таблица 5.1 Показатели качества САР.
|
Показатель качества |
Реакция на задающее воздействие |
Реакция на возмущающее воздействие |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где
![]() и
и
![]() - выходная координата внутреннего
контура при представлении его в виде
колебательного и инерционного звена
первого порядка;
- выходная координата внутреннего
контура при представлении его в виде
колебательного и инерционного звена
первого порядка;
![]() и
и
![]() - соответствующие выходные координаты
внешнего контура;
- соответствующие выходные координаты
внешнего контура;
![]() %
- перерегулирование переходного
процесса;
%
- перерегулирование переходного
процесса;
![]() -
относительное время регулирования;
-
относительное время регулирования;
![]() -
относительное время достижения
максимального перерегулирования;
-
относительное время достижения
максимального перерегулирования;
![]() -
относительное время первого достижения
установившегося значения;
-
относительное время первого достижения
установившегося значения;
![]() -
статизм
САР.
-
статизм
САР.
-
2.7 Представить частотные характеристики САР, полученные с использованием MATLAB.
-
2.8 Получить передаточные функции разомкнутой и замкнутой САР при задающем и возмущающем воздействиях.
-
2.9 Построить асимптотические ЛАЧХ и ЛФЧХ исследуемой САР. Определить косвенные показатели качества САР (частоту среза, запас устойчивости системы по фазе и амплитуде и др.)
-
2.10 Сделать выводы по работе.
-
-
Порядок выполнения лабораторной работы.
-
Теоретическая часть. Принципы построения и расчёта внешнего контура регулирования двухконтурной статической САР с последовательной коррекцией.
В системах подчинённого регулирования с последовательной коррекцией каждый контур регулирования имеет оптимальную передаточную функцию по задающему воздействию соответствующего порядка. Причём, независимо от порядка передаточной функции, САР, построенные по «модульному» или «техническому» оптимуму (фильтры Баттерворса), качественно близки, перерегулирование в любом случае не превышает 10%. Поэтому при построении внешних контуров и анализе оптимальных систем (только этого типа) внутренний контур может апроксимироваться инерционным звеном первого порядка с передаточной функцией
![]() ,
(5.1)
,
(5.1)
где i – номер контура регулирования.
В данной лабораторной работе исследуется двухконтурная оптимальная САР, внутренний контур которой и его параметры рассмотрены в лабораторной работе №3. Передаточная функция внутреннего замкнутого контура рассматривается в двух вариантах:
1) в виде колебательного звена
![]() ,
(5.2)
,
(5.2)