Материал: ТАУLAB
или
![]() (4.7)
(4.7)
где
![]() - эквивалентная постоянная времени
внутреннего замк нутого
контура;
- эквивалентная постоянная времени
внутреннего замк нутого
контура;
![]() -
относительный коэффициент затухания.
-
относительный коэффициент затухания.
Передаточная функция регуляторов в системе, настроенной по модульному оптимуму, может быть получена по обобщённой формуле
![]() ;
(4.8)
;
(4.8)
где i – номер рассматриваемого контура;
![]() -
наименьшая некомпенсируемая постоянная
времени;
-
наименьшая некомпенсируемая постоянная
времени;
W0i(p) – передаточная функция той части объекта регулирования, которая должна быть скомпенсирована регулятором;
Ki, Ki-1 – коэффициенты обратной связи рассматриваемого и предыдущего внутреннего контура соответственно.
Следовательно, передаточная функция регулятора подбирается таким образом, чтобы при его включении последовательно с соответствующим звеном объекта регулирования была скомпенсирована большая постоянная времени Т0 и взамен её действовала существенно меньшая постоянная времени Tu=a∙Tμ
В зависимости от передаточной функции W0i(p) объекта в системах подчинённого регулирования могут быть использованы регуляторы четырёх типов:
-
П – регулятор при
![]() (4.9)
(4.9)
-
И – регулятор при
![]() (4.10)
(4.10)
-
ПИ – регулятор при
![]() (4.11)
(4.11)
-
ПИД – регулятор при
![]() (4.12)
(4.12)
Статические и динамические показатели систем подчинённого регулирования зависят от настройки регуляторов: передаточных коэффициентов, постоянных времени обратной связи и постоянных времени интегрирования регуляторов, соотношения постоянных времени контуров регулирования. Поэтому при исследовании этих САР необходимо осуществить настройку вышеуказанных параметров регуляторов.
Одной из наиболее распространённых систем подчинённого регулирования является двухконтурная система подчиненного регулирования с последовательной коррекцией (рис.4.1). Поэтому важным является рассмотреть вопросы построения, расчёта и исследования статических и динамических характеристик этой системы при её настройке на модульный и симметричный оптимумы. Причём, рассмотрение этих вопросов целесообразно разделить на три этапа:
-
Исследование одноконтурных САР с последовательной коррекцией. На данном этапе следует рассмотреть вопросы расчёта, исследования и настройки внутреннего контура двухконтурных систем подчинённого регулирования, построенных как по модульному, так и симметричному оптимуму.
-
Исследование двухконтурных однократно-интегрирующих статических САР с последовательной коррекцией. На данном этапе производится расчёт, исследование двухконтурных САР, построенных по модульному оптимуму, анализ статики и динамики таких систем, как при управляющих, так и при возмущающих воздействиях.
-
Исследование двухконтурных двукратно-интегрирующих астатических САР с последовательной коррекцией, построенных по симметричному оптимуму. Исследуются статические и динамические характеристики таких САР.
Исследование вышеперечисленных систем осуществлено в виде трех лабораторных работ, описание которых представлено ниже.
3.2 Лабораторная работа № 4
Исследование одноконтурной САР с последовательной
коррекцией
Цель работы: Изучение динамических свойств и показателей качества САР методом структурного моделирования и частотного анализа систем с использованием пакета MATLAB – Simulink. Оценка влияния параметров САР на её динамические свойства. Выбор оптимальной настройки регуляторов в системе с последовательной коррекцией.
-
Математическое моделирование. Расчетно-экспериментальная часть.
-
Теоретическая часть. Ознакомление с пакетами MATLAB-Simulink, пакетом расширения Power System Blockset, Signal Processing Toolbox и др., а также способами построения моделей.
-
Составление структурной схемы и определение параметров модели одноконтурной оптимальной САР.
-
Создание моделей одноконтурной САР:
-
-
модель оптимально построенной одноконтурной замкнутой системы и разомкнутой САР без регулятора;
-
модель одноконтурной САР при изменении параметров регулятора Тр и Тр1.
-
Исследование динамических свойств(переходных процессов) одноконтурных САР по методу компьютерного моделирования:
-
при оптимальной настройке регулятора;
-
при изменении постоянной времени интегрирования регулятора Тр;
-
при изменении постоянной времени обратной связи регулятора Тр1.
-
Исследование частотных характеристик одноконтурной САР на MATLAB.
-
Расчетная и графическая части. Содержание отчета
-
Представить цель и программу работы, содержание расчетно-экспериментальной части.
-
Составить структурную схему и определить параметры модели одноконтурной оптимальной САР.
-
Создать и исследовать модели одноконтурной САР с регулятором и без него.
-
Представить результаты исследования динамических свойств (переходных процессов) одноконтурных САР при оптимальной настройке и изменении параметров регулятора Тр и Тр1. Результаты представить в виде графиков и таблиц.
-
Определить прямые показатели качества САР, результаты представить в виде следующей таблицы
-
Таблица 4.1 Показатели качества одноконтурной САР
|
Номер варианта |
Тр1 с |
Тр с |
|
|
1/ с |
Гц |
|
М |
|
1 |
Т01 |
|
|
|
|
|
|
|
|
2 |
Т01 |
|
|
|
|
|
|
|
|
3 |
Т01 |
|
|
|
|
|
|
|
|
4 |
0,5Т01 |
|
|
|
|
|
|
|
|
5 |
2Т01 |
|
|
|
|
|
|
|
![]()
где -относительное время регулирования (вхождение координаты в 2% область установившегося значения) ;
![]() -угловая
частота
колебаний;
-угловая
частота
колебаний;
![]() -
частота колебаний;
-
частота колебаний;
![]() %
- перерегулирование (
%
- перерегулирование (![]() );
);
![]() -
коэффициент
домпфирования;
-
коэффициент
домпфирования;
![]() -
показатель колебательности.
-
показатель колебательности.
-
Составить передаточные функции разомкнутых и замкнутых одноконтурных САР для всех вариантов изменения параметров регулятора.
-
Рассчитать и построить серии асимптотических логарифмических амплитудных L(w) и фазовых
 (w)
частотных характеристик.
(w)
частотных характеристик. -
Привести результаты исследования частотных характеристик одноконтурной САР на MATLAB. Определить параметры динамических звеньев (т.к) по полученным частотным характеристикам.
-
Определить и оценить косвенные показатели качества одноконтурной САР по частотным характеристикам (частота среза, запас по фазе и амплитуде и др.)
-
Выявить связь между показателями качества, параметрами системы и частотными характеристиками.
-
Сделать выводы по работе.
-
Порядок выполнения лабораторной работы
-
Составление структурной схемы и определение параметров модели одноконтурной оптимальной САР.
Одноконтурная
САР с последовательной коррекцией
является внутренним контуром двухконтурной
системы подчинённого регулирования с
последовательной коррекцией,
представленной на рис. 4.1. Разомкнутая
часть представляет собой последовательное
соединение регулятора с фильтром
(постоянная времени
![]() )
и инерционным звеном объекта регулирования
с постоянной времени Т01.
)
и инерционным звеном объекта регулирования
с постоянной времени Т01.
Передаточная функция регулятора внутреннего контура САР или одноконтурной системы, настроенной по модульному оптимуму, может быть получена по обобщённой формуле (3.8)
![]() (4.13)
(4.13)
где Tp1=T01 – постоянная времени обратной связи регулятора;
![]() -
постоянная времени интегрирования
регулятора.
-
постоянная времени интегрирования
регулятора.
Структурная схема одноконтурной САР представлена на рис.4.2.
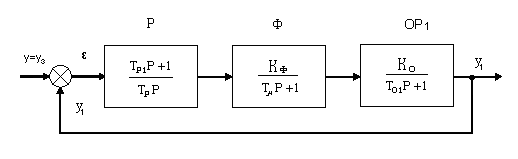
Рис. 4.2 Структурная схема одноконтурной САР
При оптимальной настройке регулятора (4.13) САР будет иметь оптимальные показатели переходного процесса (рис. 4.3). В то же время, известно, что эти показатели существенно зависят от параметров САР и от настройки регулятора. Поэтому в лабораторной работе исследуется влияние настройки регулятора на динамику САР.
Исследуется два случая:
1.
Влияние постоянной времени интегрирования
регулятора Тp.
Величина этой постоянной времени
определяется принятым соотношением
постоянных времени
![]() .
На практике в зависимости от требований
к динамике САР обычно принимают величину
.
На практике в зависимости от требований
к динамике САР обычно принимают величину
![]() в
пределах от
в
пределах от
![]() =1
до
=1
до
![]() =
4. Поэтому в работе рассматриваются
следующие варианты:
=
4. Поэтому в работе рассматриваются
следующие варианты:
![]() - базовый
вариант оптимальной настройки
- базовый
вариант оптимальной настройки
![]()
![]()
2.
Влияние постоянной времени обратной
связи регулятора
![]() :
:
1)
![]()
![]() ;
;
4)
![]()
![]() ;
;
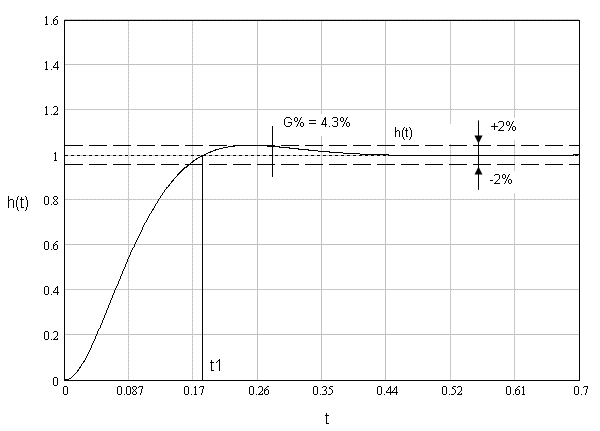
Рис.4.3 Кривая переходного процесса h(t) замкнутой САР
5)
![]()
![]() .
.