Материал: ТАУLAB
Весовые функции интегрирующих звеньев
Для получения весовых функций используются те же блоки, что и для переходных, только генератор ступенчатого сигнала Step заменяется генератором сигналов Signal Builder (рис. 3.9). Параметры блока Transfer Fсn аналогичны параметрам для переходной функции. Щёлкнув два раза левой кнопкой мышки на Signal Builder, задаём согласно варианту сигнал.
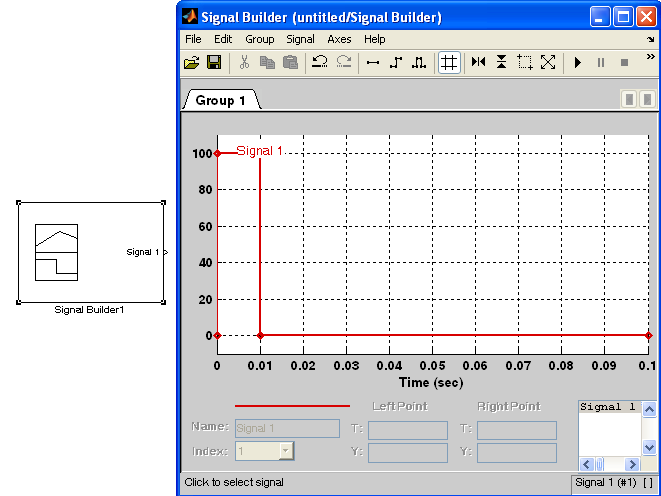
Рис.3.9. Окно генератора сигнала Signal Builder
Графики весовых функций интегрирующих звеньев показаны на рис. 3.10.
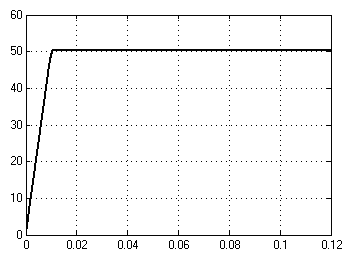
а - идеального интегрирующего звена;
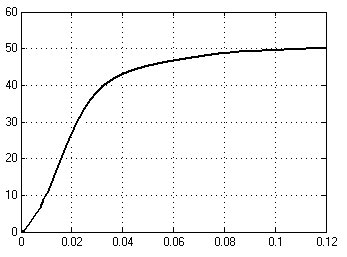
б - реально-интегрирующего звена;
в - пропорционально-интегрирующее звено
Рис. 3.10 Графики весовых функций интегрирующих звеньев
-
Исследование временных характеристик дифференцирующих звеньев
Переходные функции дифференцирующих звеньев
Исследуются следующие дифференцирующие звенья: пропорционально-дифференциальное с передаточной функцией
![]()
![]()
и реальное дифференцирующее звено с передаточной функцией
![]()
при Т2=Т=0.02 и Т1=k=0.04
Исследуются два случая пропорционально - дифференциального звена с параметрами:
а) дифференцирующего типа
![]()
б) интегрирующего типа
![]()
Схема модели дифференцирующих звеньев в окне модели Simulink представлена на рис. 3.11.
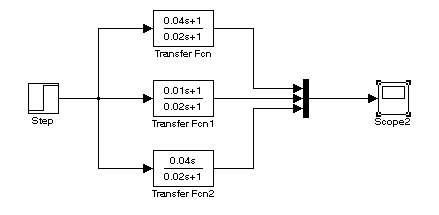
Рис.3.11. Схема модели для исследования переходных функций
дифференцирующих звеньев
Окна параметров блоков Transfer Fcn пропорционально - дифференциального звена представлены на рис. 3.12.
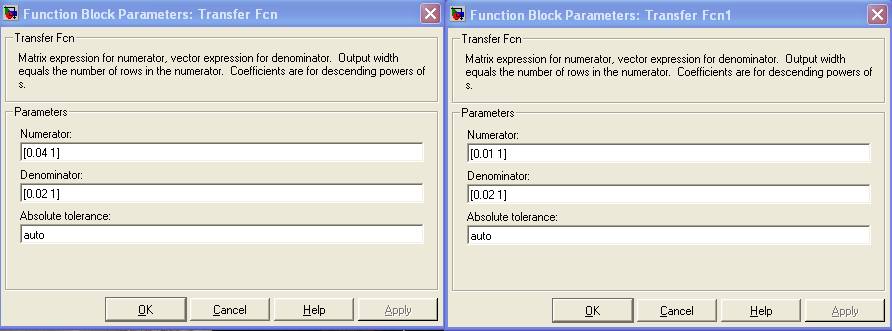
Рис. 3.12 Окна параметров блоков Transfer Fcn пропорционально-
дифференциального звена
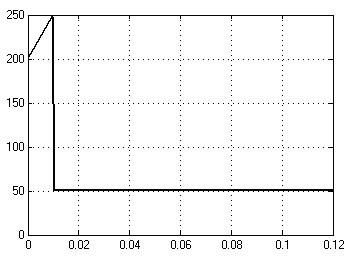
Графики переходных функций дифференцирующих звеньев полученные на осциллографе представлены на рис. 3.13.
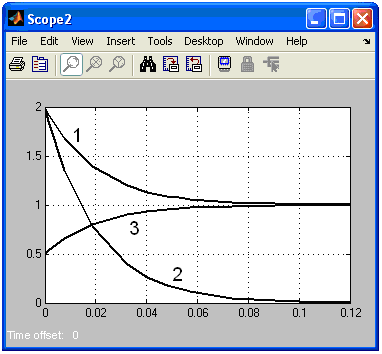
Рис. 3.13 Графики переходных функций дифференцирующих звеньев:
1 – ПД дифференциального типа; 2 – РДЗ; 3 – ПД интегрального типа
Окно параметров блоков Transfer Fсn реального дифференцирующего звена представлено на рис. 3.14.
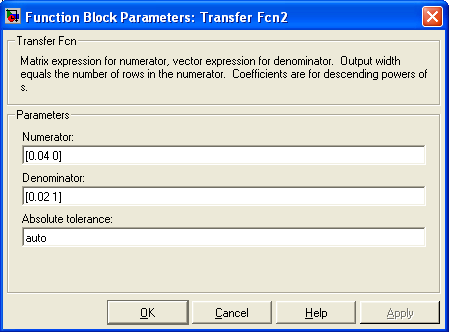
Рис. 3.14 Окно параметров блоков Transfer Fсn реального
дифференцирующего звена
Весовые функции дифференцирующих звеньев
Схема модели для получения весовых функций с генератором сигналов Signal Builder представлена на рис. 3.15.
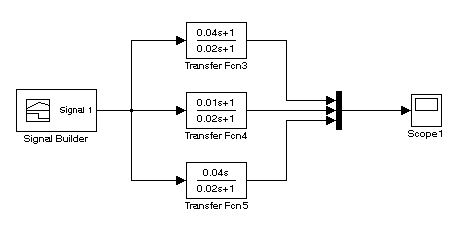
Рис.3.15 Схема модели для исследования весовой функции
дифференцирующих звеньев
График весовых функций дифференцирующих звеньев полученные на осциллографе, представлены на рис. 3.16.
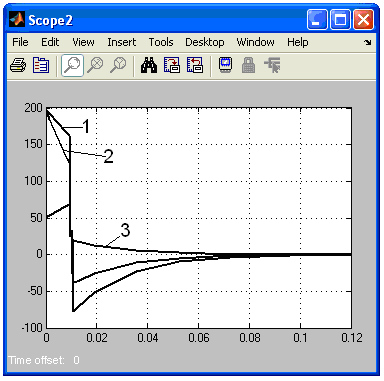
Рис. 3.16 График весовых функций дифференцирующих звеньев:
1 – ПД дифференциального типа; 2 – РДЗ; 3 – ПД интегрального типа
-
Исследование временных характеристик аналитическим методом
-
Идеальное интегрирующее (И) звено
![]()
![]()
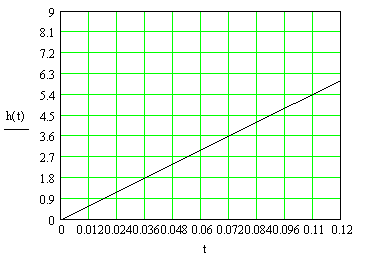
Рис. 3.17 Графики переходной и весовой функций идеального
интегрирующего звена
-
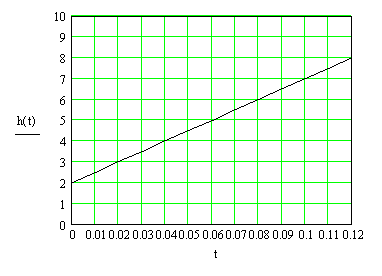
Интегрирующее звено с замедлением
![]()
![]()
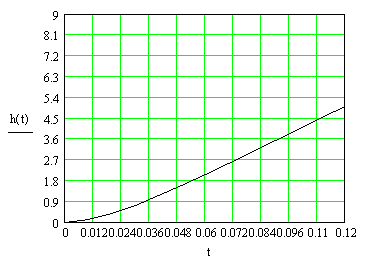
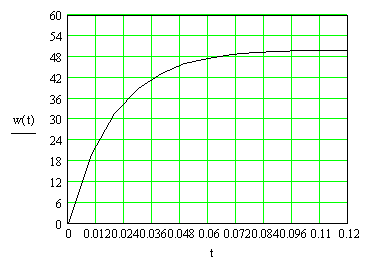
Рис. 3.18 Графики переходной и весовой функций интегрирующего
звена с замедлением
-
Пропорционально-интегральное (ПИ) звено
![]()
![]()
3.19 Графики переходной и весовой функций
пропорционально-интегрального звена
-
Пропорционально-дифференциальное (ПД) звено
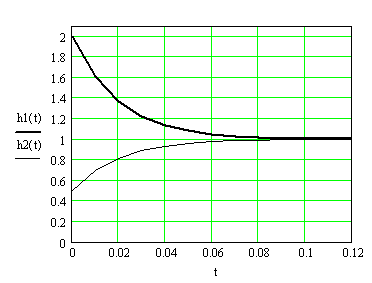
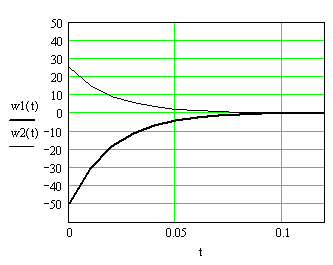
Рис. 3.20 Графики переходной и весовой функций
пропорционально-дифференциального звена
-
Реальное дифференцирующее (Д) звено
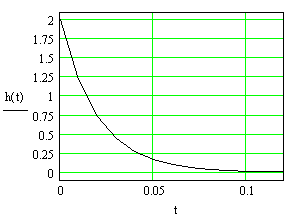
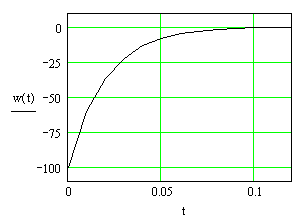
Рис. 3.21 Графики переходной и весовой функций реального
дифференцирующего звена
-
Частотный анализ динамических звеньев с использованием пакета MATLAB, Control System Toolbox
Комплект инструментальных средств "Control System"- набор функций MATLAB для моделирования, анализа и проектирования автоматических систем управления. Функции в этом комплекте инструментальных средств работают с широко распространенной классической передаточной функцией и "современными" методами управления в пространстве состояний. С помощью этих инструментальных средств можно моделировать и анализировать системы как в дискретной, так и в непрерывной области. Графики временных характеристик и корневого годографа могут быть быстро вычислены и построены.
Возможности библиотеки
Системное моделирование(System Models):
-
Описание дискретных и непрерывных систем.
-
Пространство состояний, функции преобразования, полюса и нули, элементарные модели в виде передаточных функций.
-
Построение линейной модели системы.
-
Модельные преобразования: из дискретной в непрерывную область, модель пространства состояний к передаточной функции и другим моделям.
Анализ (Analysis):
-
Функции временных характеристик: импульсная ПФ, зависимость от периода дискретизации, переходная характеристика, обобщенное линейное моделирование.
-
Функции частотных характеристик: Боде, Николса, графики сингулярных значений.
Моделирование объекта управления (Control Design):
-
Оптимизация обратной связи: выбор коэффициентов демпфирования, запас устойчивости по фазе и амплитуде, расположение полюсов, корневой годограф, интерактивное определение усиления, LQR/LQE проект.
-
Реализационная модель: управляемость, реализация с использованием минимального количества компонент математической модели, модель с корректирующим устройством, уменьшение порядка модели.
-
Свойства модели: наблюдаемость и управляемость Грамиана, наблюдаемость и управляемость матрицы, нули передачи, уравнение Ляпунова, отклик на ковариацию.
Последовательность выполнения работы
В Control System Toolbox имеется тип данных, определяющих динамическую систему в виде комплексной передаточной функции. Синтаксис команды, создающий LTI-систему c одним входом и одним выходом в виде передаточной функции:
TF([bm, …, b1, b0], [an, …, a1, a0])
bm, …, b1 – значения коэффициентов полинома В в (1.3),
an, …, a1 – значения коэффициентов полинома A в (1.3).
Для выполнения работы могут применяться команды, приведенные в таблице 1.1.(Л.р.№1).
Для определения корней полиномов степени k, может, также, применятся команда MATLAB roots(P), которая, в качестве аргумента P, получает матрицу коэффициентов полинома [pk, …, p0].
Другим вариантом получения графиков динамических характеристик САУ является использование графического интерфейса ППП CST – LTI viewer, вызов которого осуществляется командой ltiview, которой в качестве параметра можно указать имя переменной, содержащей LTI-объект.
Таким образом, дальнейшее выполнение лабораторной работы состоит из следующих шагов:
-
Изучить теоретические сведения.
-
Запустить систему MATLAB.
-
Создать tf-объект, в соответствии с заданным вариантом.
-
Используя LTI-viewer, или соответствующие команды (табл.1.3) получить динамические характеристики – переходную функцию h(t), импульсно-переходную функцию w(t) и частотные характеристики – диаграмму Боде, частотный годограф Найквиста.
-
Идеальное интегрирующее (И) звено
Передаточная функция
![]()
![]()
Создаём tf-объект для данной передаточной функции
w=tf([50],[1 0])
Transfer function:
50
--
s
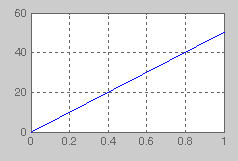
Построим переходную функцию командой step(w).
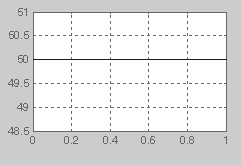
Построим импульсную переходную функцию командой impulse(w).
h(t) h(t)
 t
t
 t
t
Рис. 3.22 Переходная h(t) и импульсно-переходная функции
идеального интегрирующего звена
Логарифмическую частотную характеристику (диаграмму Боде) получим, используя команду bode(w)
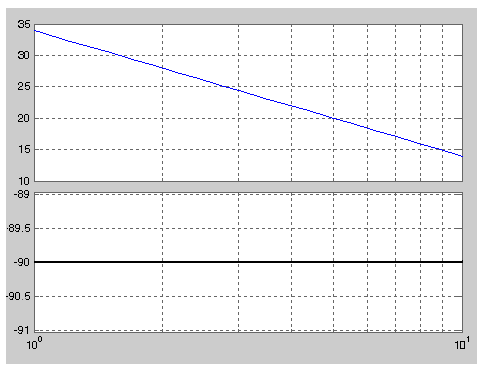
Рис. 3.23 Логарифмические частотные характеристики
идеального интегрирующего звена
Определим комплексно-частотную функцию (частотный годограф Найквиста), выполнив команду nyquist(w)