Материал: Основы теории управления. Лопатин Р.С., Федорков Е.Д
6.Системыавтоматического управления с цифровыми вычислительными машинами
Для современной техники управления производственными процессами широкое применение находят цифровые вычислительные машины (ЦВМ), которые используются не только для сбора и обработки информации, но и для непосредственного управления процессами.
Большинство САУ с ЦВМ можно представить в виде следующей блок-схемы Рис.24.
Преобразователи связывают ЦВМ, у которой входная и выходная величины представлены в цифровой форме, с НЧ САУ. Преобразование Н.–Ц. заключается в квантовании непрерывной величины в цифровой код. Любой преобразователь Н-Ц независимо от принципа действия и конструктивного исполнения осуществляет три основные функции:
- квантование по времени;
- квантование по амплитуде;
- кодирование.
Перечисленные этапы выполняются либо последовательно, либо сразу в виде одной операции. Такое преобразование называется кодоимпульсной модуляцией. Поэтому САУ с ЦВМ иногда называют кодо-импульсными системами.

Рис.24. Кодоимпульсная система
Здесь: НЧ - непрерывная часть САУ, обычно это объект управления (ОУ);
ЦВМ - цифровая вычислительная машина;
П.Н-Ц, П.Ц-Н - соответственно, преобразователи непрерывной величины в цифровую и наоборот.
Преобразование Н-Ц называют кодированием.
Преобразование Ц-Н называют декодированием.
Отметим, что каждое значение преобразуемой входной величины представляется не одним, а серией импульсов в определенной комбинации модулируемого параметра (амплитуда, ширина, фаза) этих импульсов.
Наибольшее распространение, как известно, получил двоичный код, соответствующий системе счисления с основанием.
Каждый разряд двоичного числа может иметь только одно из двух значений: 0 или 1, и соответственно, моделируемому параметру каждого импульса, представляющего значение одного из разрядов, тоже придается одно из двух крайних значений. Знак величины передается с помощью отдельного импульса тоже с двумя возможными значениями модулируемого параметра.
Преобразователь
Ц-Н цифровой величины в непрерывную
преобразует выходной сигнал ЦВМ в
ступенчатую функцию
![]() .
.
Достоинства цифровых САУ:
- высокая точность;
- высокая помехозащищенность;
- возможность реализации очень сложных алгоритмов управления (и простая их замена);
- возможность многоточечного управления.
Следует помнить, что эти достоинства достигаются ценой значительно большей стоимости и сложности цифровых систем.
Однако область применения цифровых систем в настоящее время быстро расширяется. (Примеры: САУ судами, самолетами и ракетами; системы управления химическими и другими производствами: домны, энергосистемы, целые заводы и т.д.).
Основными элементами цифровой системы являются:
- ЦВМ
- устройства ввода
- устройства вывода
Устройствами ввода и вывода в случае состыковки с аналоговыми сигналами являются АЦП и ЦАП-ы, а в случае состыковки с цифровыми сигналами - порты и интерфейсы.
В системах с ЦВМ, последние могут выполнять роли регулятора, регулятора и устройства сравнения, корректирующего устройства или самого объекта.
Если ЦВМ универсальная (ЭВМ), то возможно построение многофункциональных САУ, когда одна ЦВМ обслуживает комплекс составляющих объект устройств.
Например, в автомобиле система навигации, система бортового электропитания, АБС, электронная подвеска, управление топливоподачей, ... В подобных случаях в состав системы ЦУ должны входить аналоговые или цифровые мультиплексоры и демультиплексоры.
6.1. Процессы, протекающие в системах цу
Дискретная природа ЦВМ определила наличие 2-х процессов в системах ЦУ: 1) дискретизации сигналов по времени (получение решетчатой функции), и квантования сигналов по уровню (АЦ и ЦА преобразования).
Дискретизация сигналов по времени делает систему дискретной, а квантование по уровню - нелинейной. Оба процесса сопровождаются возникновением методических погрешностей.
Выбор частоты дискретизации производится исходя из ширены полосы пропускания или из времени регулирования замкнутой системы. Разумные частоты дискретизации в 6..10 раз больше ширены полосы пропускания или от 2-х до 4-х дискретных отсчетов за время нарастания, в противном случае качество системы будет резко ухудшаться.
Количество ступеней квантования по уровню оказывает существенное влияние на динамические свойства систем. При недостаточном их количестве могут возникать периодические режимы переключений между дискретами (автоколебания).
Может случиться так, что выполняемые ЦВМ задачи (опрос датчиков, расчет программы, формирование информационных потоков, запись в порты вывода) могут быть выполнены только при систематической задержке синтезируемого воздействия на один такт дискретизации.
Обычно количество ступеней квантования по уровню велико, поэтому его влиянием пренебрегают. Это делает систему, линейной и позволяет использовать математический аппарат импульсных систем.
6.2. Особенности динамики цифровых сау
Как уже говорилось, важнейшим элементом цифровых САУ являются преобразователи Н-Ц. Следовательно квантование по времени делает САУ дискретной, а квантование по амплитуде приводит систему к нелинейной.
ЦВМ в САУ имеет значительное количество нелинейных элементов и обладает переменной структурой, изменяющейся по командам управляющих устройств.
Для упрощения
расчетов полагают, что входные данные
ЦВМ связаны однозначной зависимостью
и поэтому заменяют ЦВМ эквивалентной
схемой, которая включает в себя дискретный
фильтр, изменяющий вид модуляции входной
последовательности импульсов и звено
чистого запаздывания с ПФ, равной
![]() ,
где
,
где
![]() – время прохождения сигнала через
дискретный фильтр. Основным элементом
выходного устройства ЦВМ является
преобразователь кода, который решает
задачу преобразования кода в
амплитудно-импульсный код в дискретные
моменты времени
– время прохождения сигнала через
дискретный фильтр. Основным элементом
выходного устройства ЦВМ является
преобразователь кода, который решает
задачу преобразования кода в
амплитудно-импульсный код в дискретные
моменты времени
![]() и т.д., где
и т.д., где
![]() – период повторения ЦВМ.
– период повторения ЦВМ.
При таких допущениях можно САУ с ЦВМ считать линейной импульсной системой и для расчетов использовать уже рассмотренный нами математический аппарат.
6.3. Методы исследования цифровых сау
Математическое описание цифровых САУ, аналогично импульсным, осуществляется с помощью разностных уравнений и дискретного преобразования Лапласа. Однако, в отличие от импульсных систем в САУ с ЦВМ имеется еще квантование по уровню. Структурная схема САУ с ЦВМ тогда принимает вид Рис.25.
Рис.25. Структурная схема САУ с ЦВМ
В ней преобразователь Н-Ц представлен идеальным импульсным элементом ИЭ1 с квантователем К1, статическая характеристика .
Преобразователь Ц-Н состоит из квантователя К2, статическая характеристика которого в общем случае по числу ступенек, отличается от К1; ИЭ2 и формирующим элементом ФЭ.
ИЭ2 и ФЭ
преобразуют решетчатую функцию на
выходе К2 в П-образные импульсы с
![]() .
.
Передаточная функция формирующего элемента, как и ранее для импульсных систем, имеет вид:
|
|
где
![]() - импульс единичной высоты на выходе
ИЭ2.
- импульс единичной высоты на выходе
ИЭ2.
Дискретная ПФ непрерывной части системы будет определяться
|
|
ПФ ЦВМ имеет вид
![]() ,
её выражение определяется алгоритмом
работы ЦВМ и имеет вид линейных разностных
уравнений, следовательно дискретной
ПФ.
,
её выражение определяется алгоритмом
работы ЦВМ и имеет вид линейных разностных
уравнений, следовательно дискретной
ПФ.
7.Особенности математического описания цифровых систем управления
7.1. Правила эквивалентных преобразований структурных схем систем автоматического управления
САУ представляет собой систему, состоящую из функциональных элементов, каждый из которых может быть представлен в виде динамического звена. То есть САУ можно представить в виде совокупности динамических звеньев с известными математическими моделями. Рассмотрим структуру типичной САУ.
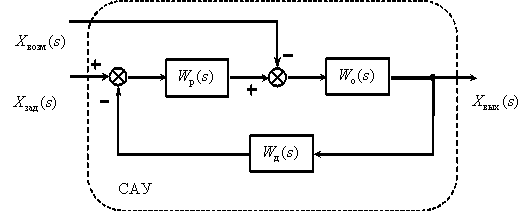
Рис. 26. Структура типичной САУ
где
![]() -
передаточные функции соответственно
объекта, датчика и регулятора,
-
передаточные функции соответственно
объекта, датчика и регулятора,
![]() -
изображения задающего, возмущающего и
выходного сигналов.
-
изображения задающего, возмущающего и
выходного сигналов.
В процессе анализа и синтеза САУ необходимо получать передаточные функции САУ, которые связывают выходную переменную с заданием и возмущением в САУ, по известным структурной схеме и передаточным функциям динамических звеньев, входящих в состав САУ.
Аналогичная задача возникает в том случае, когда известны частотные характеристики динамических звеньев, а необходимо определить частотные характеристики САУ, характеризующие связи между выходом и входом САУ.
Решением этих задач мы и займемся в дальнейшем.
Эта задача решается путем преобразования (сворачивания) структурной схемы к одному динамическому звену с искомой передаточной функцией на основе использования правил эквивалентных преобразований структурных схем и принципа суперпозиции (наложения).
Правила эквивалентных преобразований позволяют найти необходимую передаточную функцию САУ, свернув структурную схему к одному динамическому звену с искомой передаточной функцией.
Рассмотрим правила эквивалентных преобразований, не изменяющих свойств систем и необходимых для нахождения передаточной функции:
Последовательное соединение динамических звеньев.
![]()
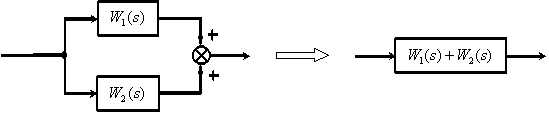
Параллельное соединение динамических звеньев.
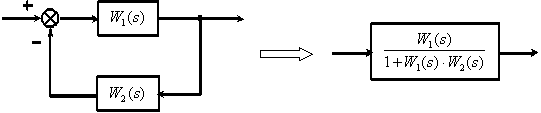
Замкнутый контур с отрицательной обратной связью.
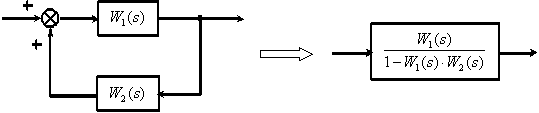
Замкнутый контур с положительной обратной связью.
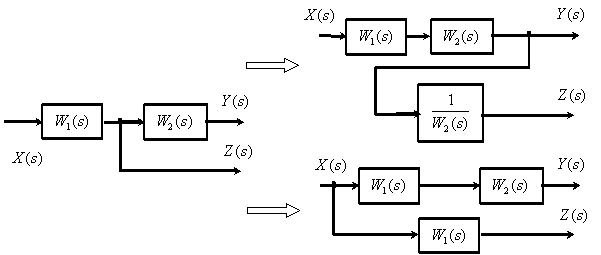
Перенос точки ветвления через динамическое звено.