Материал: Основы теории управления. Лопатин Р.С., Федорков Е.Д
7.4. Оценка качества при гармонических
воздействиях
Качество переходных процессов в системах и объектах при гармонических воздействиях оценивают по частотным характеристикам, снятым экспериментально или рассчитанным по параметрам математической модели. В этом случае получают частотные критерии качества переходных процессов, которые относят к косвенным критериям.
Частотные критерии определяют по одной из частотных характеристик: амплитудно-фазовой, амплитудной, вещественной или логарифмической амплитудной. Рассмотрим в качестве основы определение косвенных показателей качества по амплитудной частотной характеристике (АЧХ) систем.
![]() -
показатель колебательности, определяемый
как отношение максимального значения
АЧХ к ее значению при
-
показатель колебательности, определяемый
как отношение максимального значения
АЧХ к ее значению при
![]()
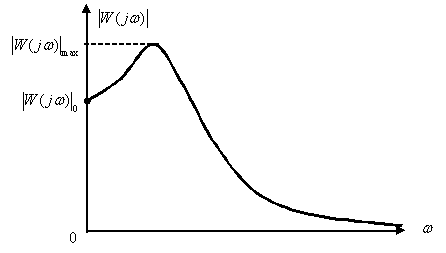
Рис. 43 Частотная характеристика
Показатель колебательности характеризует склонность систем или объектов к колебательности. Чем выше показатель колебательности, тем более колебательна система, то есть менее качественна.
При
![]() переходная
характеристика системы неколебательная,
а АЧХ системы имеет примерный вид,
показанный на рис. 44.
переходная
характеристика системы неколебательная,
а АЧХ системы имеет примерный вид,
показанный на рис. 44.
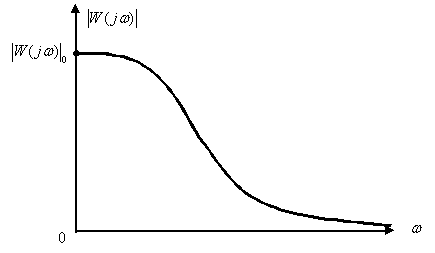
Рис. 44 АЧХ системы
Если
![]() ,
то говорят о незатухающих колебаниях
переходной характеристики, а АЧХ системы
имеет вид, показанный на рис. 45.
,
то говорят о незатухающих колебаниях
переходной характеристики, а АЧХ системы
имеет вид, показанный на рис. 45.
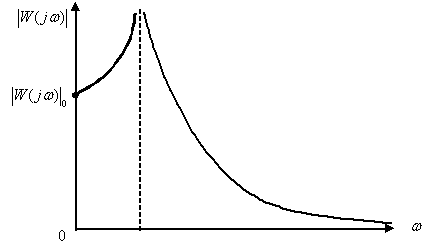
Рис. 45 Переходная характеристика системы
Считается допустимым,
если
![]() .
.
![]() –
резонансная частота
системы или объекта, при которой АЧХ
имеет максимум.
–
резонансная частота
системы или объекта, при которой АЧХ
имеет максимум.
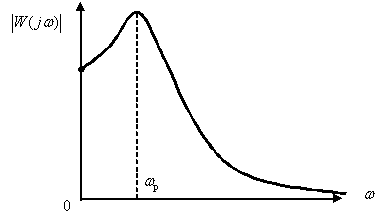
При гармонические сигналы проходят через систему с наибольшим усилением.
Полоса пропускания
системы управления - это интервал частот
от
до
частоты
![]() ,
в котором выполняется условие
,
в котором выполняется условие
![]() .
.
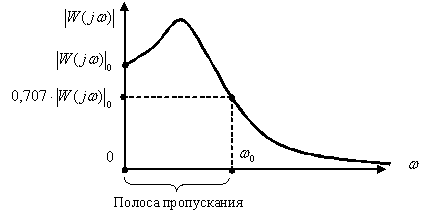
Рис. 46
Полоса пропускания
систем не должна быть очень широкой,
чтобы не проходили высокочастотные
помехи. С другой стороны, чем выше частота
сигналов, которые пропускает система,
тем выше ее быстродействие. В электроприводах
полосу пропускания задают в герцах, для
систем управления скоростью вращения
двигателя полоса пропускания, в
зависимости от типа двигателя и
преобразователя энергии, находится в
диапазоне
![]() Гц,
Гц,
![]() ,
,
при этом накладывается
дополнительное ограничение о том, что
фазочастотная характеристика в полосе
пропускания не должна опускаться ниже
![]() .
.
![]() –
частота среза, при
которой АЧХ системы принимает значение,
равное единице
–
частота среза, при
которой АЧХ системы принимает значение,
равное единице
![]() ,
,
как это показано на рис. 47.
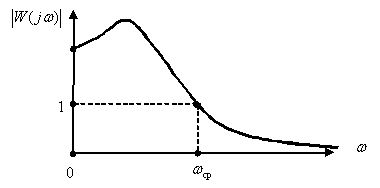
Рис. 47 АЧХ системы
косвенно характеризует длительность переходного процесса, так же как и . Время регулирования системы обратно пропорционально частоте среза
![]() ,
,
если переходный
процесс имеет
![]() колебания,
то можно установить связь между частотой
среза т временем достижения первого
максимума
колебания,
то можно установить связь между частотой
среза т временем достижения первого
максимума
![]() .
.
Полоса среза, как характеристика быстродействия систем получила распространение, так как она легко определяется на логарифмических частотных характеристиках (см. рис. 48).
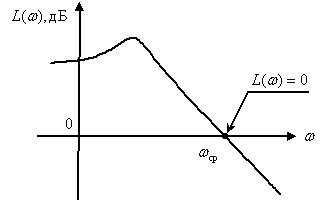
Рис. 48 Логарифмическая частотная характеристика
7.4.1. Интегральные оценки качества
Интегральными оценками качества переходного процесса систем управления называют интегралы по времени от некоторых функций переходного процесса изменения ошибки регулирования.
Рассмотрим скалярную
линейную систему, показанную на рис.
49. На вход управления системы поступает
ступенчатый сигнал с амплитудой
![]() ,
система предназначена для стабилизации
заданного значения регулируемой
переменной
,
система предназначена для стабилизации
заданного значения регулируемой
переменной
![]() ,
на систему так же может действовать
скалярное ступенчатое возмущение
,
на систему так же может действовать
скалярное ступенчатое возмущение
![]() стремящееся
снизить значение регулируемой переменной.
стремящееся
снизить значение регулируемой переменной.
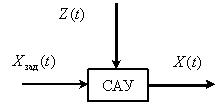
Рис. 49 Скалярная линейная система
Примерный вид графиков переходных процессов регулируемой величины и ошибки регулирования
![]() ,
,
показаны соответственно на рис. 50 и 51.
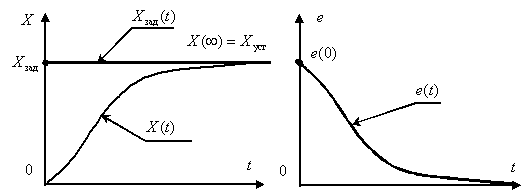
Рис. 50 Переходные процессы регулирования

Рис. 51 Переходные процессы
Основные области применения интегральных оценок в теории автоматического управления:
- Общая оценка быстроты затухания и величины отклонения регулируемой величины в совокупности, без определения того и другого в отдельности.
- Выбор при синтезе параметров систем, обеспечивающих оптимальность переходного процесса с точки зрения достижения минимума интегральных оценок.
Простейшей интегральной оценкой может служить линейная интегральная оценка следующего вида
 .
.
Геометрическая интерпретация этого интеграла представляет собой площадь под кривой , как это показано на рис. 52 для переходных процессов изменения ошибки при управлении и возмущении.
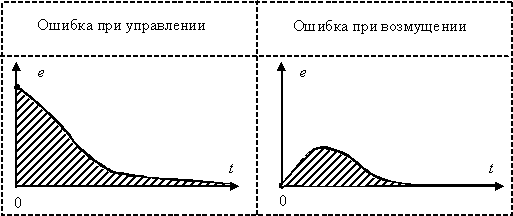
Рис. 52 Геометрическая интерпретация
Если система управления устойчива и обладает свойством астатизма, тогда
![]() ,
,
а интеграл
![]() стремится
к конечному значению, равному площади
под кривой
.
Параметры системы управления стремятся
выбирать таким образом, чтобы добиться
минимума
,
при этом идеальный переходный процесс
будет стремиться к идеальной ступенчатой
форма.
стремится
к конечному значению, равному площади
под кривой
.
Параметры системы управления стремятся
выбирать таким образом, чтобы добиться
минимума
,
при этом идеальный переходный процесс
будет стремиться к идеальной ступенчатой
форма.
7.5. Определения и задачи идентификации
математических моделей
Идентификация динамических объектов в общем случае состоит в определении их структуры и параметров по наблюдаемым данным - входному воздействию и выходным величинам.
В этом случае объект (элемент системы, объект управления, элемент технологического процесса и т. п.) представляет собой "черный ящик". Исследователю необходимо, подвергая объект внешним воздействиям и анализируя его реакции, получить математическую модель (описание его структуры и параметров), то есть превратить "черный ящик" в "белый ящик", добиться его "информационной прозрачности". Графически процесс идентификации иллюстрирует рис. 53.
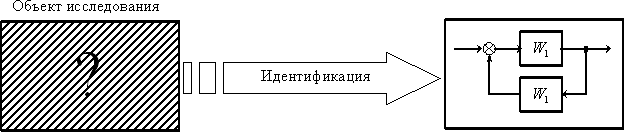
Рис. 53 Графически процесс идентификации
Важным моментом этого процесса является выбор точек приложения внешних воздействий и сбор информации о реакциях объекта, то есть размещение управляющих устройств и датчиковых систем.
Решается при идентификации объектов и более простая (относительно простая) задача, это задача идентификации параметров, когда заранее известна структура математической модели объекта, но не известны ее параметры. В этом случае говорят о переходе от "серого ящика" к "белому ящику". Графически процесс идентификации параметров иллюстрирует рис. 54.
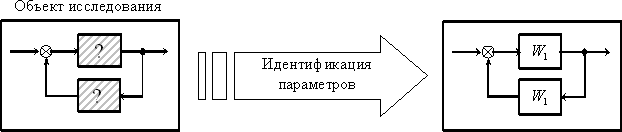
Рис. 54 Процесс идентификации
Задача идентификации параметров может либо входить компонентом в общую задачу идентификации объекта, либо решаться самостоятельно.
Рассмотрим на обобщенной структуре и процедуре процесса идентификации основы подхода к решению задач идентификации. Обобщенная структура процесса идентификации показана на рис. 54.
Обобщенная процедура идентификации:
- Классификация объекта;
- Выбор для определенного класса объекта настраиваемую модель, то есть модель, структуру и параметры которой можно менять в процессе идентификации;
- Выбрать критерий (оценку) качества идентификации, характеризующий в виде функционала доступных для наблюдения переменных отличие модели и объекта;
- Выбрать алгоритм идентификации (механизм настройки модели), обеспечивающий сходимость процесса идентификации, минимум критерия качества идентификации.
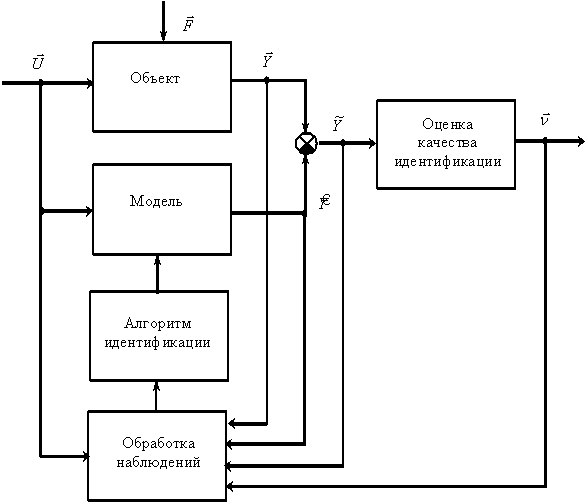
Рис. 55 Алгоритм идентификации
Методы идентификации принято разделять на две группы:
- активная идентификация - идентификация вне контура управления,
- пассивная идентификация - идентификация в контуре управления.
Активная идентификация
В этом случае объект исследования выводится из условий нормальной окружающей среды (нормальный режим эксплуатации, номинальные параметры рабочего режима и т. п.). Исследования проводятся в специализированных лабораторных условиях, как это показано на рис. 56. На входы объекта (рабочие и дополнительные) подаются тестовые сигналы специального вида. Это могут быть:
- ступенчатые и импульсные временные сигналы,
- гармонические сигналы,
- случайные воздействия с заданными параметрами.
Активную идентификацию используют при разработке новых технологий применительно к действующим промышленным объектам, в изучении новых явлений, в первоначальной разработке математической модели.
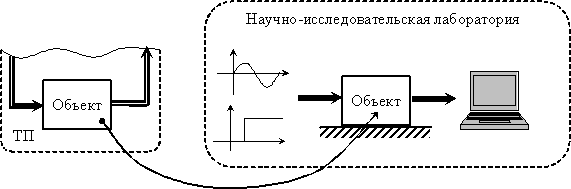
Рис. 56 Активная идентификация
Пассивная идентификация
При пассивной идентификации объект функционирует в контуре управления, находится в процессе нормальной эксплуатации. На его входы поступают только естественные сигналы управления.
Пассивную идентификацию используют для уточнения математической модели, для слежения за изменениями в объекте. Информация оперативно используется в системе управления объектом, процесс такой идентификации иллюстрируется рис. 57.
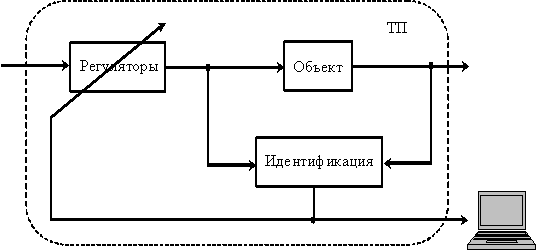
Рис. 57 Пассивная идентификация
Кроме перечисленных групп методов реализуются и системы идентификации смешанного типа, когда объект не выводится из нормального режима эксплуатации, но к управляющим сигналам добавляются тестовые воздействия, позволяющие идентифицировать объект, не ухудшая качества основного процесса управления.
Более подробно рассмотрим активную идентификацию.
Активная идентификация объектов управления может производиться как во временной области, так и в частотной области. При этом В каждой области используют собственные алгоритмы и методы идентификации.
При активной идентификации в большинстве случаев используют полученные в результате экспериментов характеристики:
- частотные характеристики (АФЧХ, ЛАЧХ, ЛФЧХ и др.),
- временные характеристики (ступенчатое изменение задания, "узкий" импульс задания и др.).
Рассмотрим в качестве примера один из подходов решения задачи идентификации структуры и параметров объекта в частотной области. Ограничим рассмотрение объектом с одним входом и одним выходом.
Мы знаем, что если имеется математическая модель такого объекта в виде передаточной функции
|
(7.3) |
то это соответствует наличию полной информации о структуре и параметрах объекта, всех его характеристиках.
Преобразуем передаточную функцию (1) к полюсно-нулевому представлению, форме Боде
|
(7.4) |
где
![]() –
коэффициент усиления (
–
коэффициент усиления (![]() ),
),
![]() -
соответственно полюсы и нули передаточной
функции.
-
соответственно полюсы и нули передаточной
функции.
Если среди корней ( ) встречаются комплексно сопряженные пары корней, то разложение (2) необходимо дополнить сомножителями следующего типа