Материал: Основы теории управления. Лопатин Р.С., Федорков Е.Д
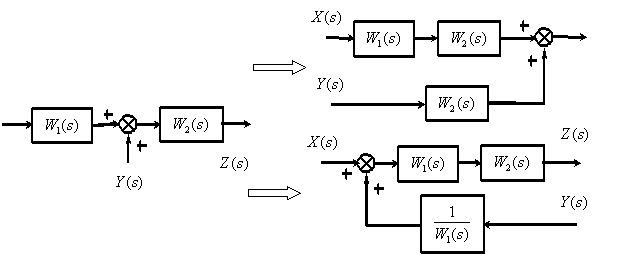
Перенос суммирующего звена через динамическое звено.
Перестановка суммирующих звеньев.

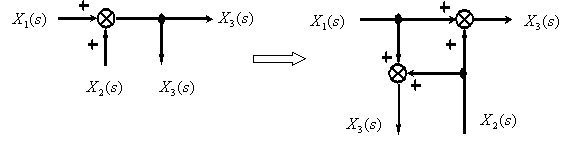
Перенос точки ветвления с выхода на вход суммирующего звена.
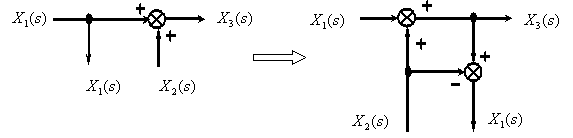
Перенос точки ветвления с входа на выход суммирующего звена.
7.1.1. Принцип суперпозиции (наложения)
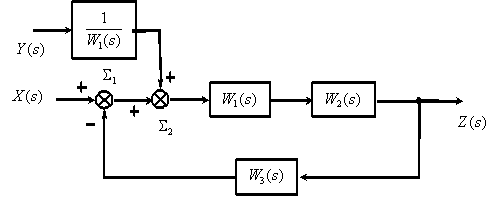
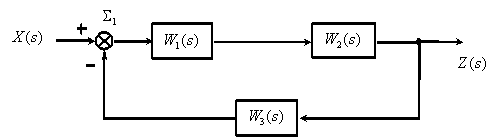
Применим рассмотренные правила для упрощения структурной схемы
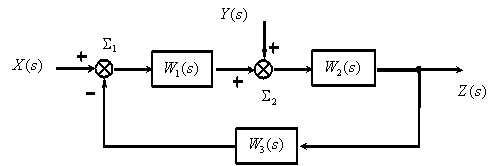
Рис. 27. Cтруктурная схема
Процесс преобразования, который часто называют свертыванием структурной схемы, выглядит следующим образом.
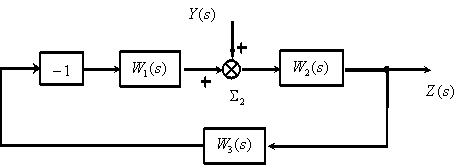
Перенесем суммирующее
звено
![]() через
динамическое звено
через
динамическое звено
![]() .
.
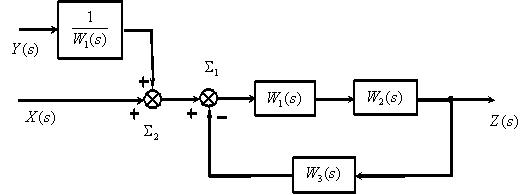
Поменяем местами
суммирующие звенья
![]() и
.
и
.
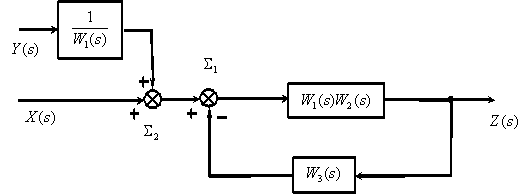
Преобразуем
последовательно включенные динамические
звенья
и
![]() .
.
Преобразуем
замкнутый контур с отрицательной
обратной связью (![]() ).
).
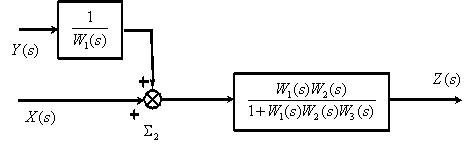
Перенесем суммирующее звено вправо.
Преобразуем последовательно включенные звенья.
В соответствии с полученной структурной схемой запишем операторное уравнение:
|
(7.1) |

Уравнение показывает,
что
![]() является
линейной комбинацией изображений
входных сигналов, взятых с коэффициентами
является
линейной комбинацией изображений
входных сигналов, взятых с коэффициентами
![]() и
и
![]() .
Выясним смысл этих коэффициентов на
примере коэффициента
.
Для этого положим в (1)
.
Выясним смысл этих коэффициентов на
примере коэффициента
.
Для этого положим в (1)
![]() ,
тогда получим –
,
тогда получим –
|
(7.2) |
Таким образом, из
(2) следует,
-
это передаточная функция динамического
звена, к которому свернута структурная
схема в предположении, что изображения
всех входных сигналов, кроме
![]() ,
равны нулю.
,
равны нулю.
Теперь становится ясным смысл и самого операторного уравнения (1), описывающего систему. Он заключается в том, что реакция линейной системы на совместно действующие входные сигналы может быть определена в виде суммы частичных реакций, каждая из которых вычисляется в предположении, что на систему действует только один входной сигнал, а остальные равны нулю.
По сути - это формулировка фундаментального принципа, который называют принципом наложения или суперпозиции. Этот принцип можно рассматривать как дополнение к правилам эквивалентных преобразований структурных схем и активно использовать на практике.
Практически принцип суперпозиции для нахождения конкретной передаточной функции используют следующим образом. Полагают равными нулю все входные сигналы, кроме необходимого сигнала, а затем выполняют преобразование структурной схемы в одно динамическое звено.
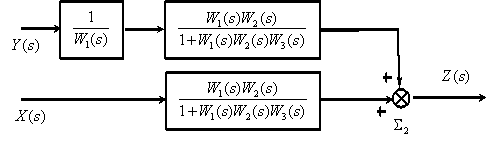
Рассмотрим использование принципа суперпозиции на примере показанной на рис. 1 структурной схемы.
Полагаем и изобразим соответствующую этому случаю структурную схему.
Используя эквивалентные преобразования, получим –
 .
.
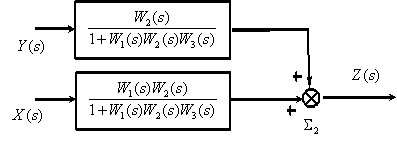
Полагаем
![]() и
изобразим соответствующую этому случаю
структурную схему.
и
изобразим соответствующую этому случаю
структурную схему.
Используя эквивалентные преобразования, получим
 .
.
Имея
![]() ,
в соответствии с принципом суперпозиции
получим "свернутую" структурную
схему САУ (см. Рис 28).
,
в соответствии с принципом суперпозиции
получим "свернутую" структурную
схему САУ (см. Рис 28).
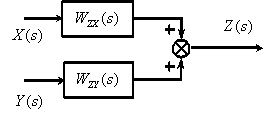
Рис 28 Структурная схема САУ
7.2. Понятие многомерной системы
Рассмотрим определение многомерной системы, используемое в теории управления.
Многомерными системами называют системы управления, в которых имеются несколько, больше одной, управляемых переменных величин.
Одномерная система характеризуется тем, что контролируется (измеряется, регулируется) лишь одна переменная величина объекта управления. Рассмотрим структуру типичной одномерной системы управления на примере управления скоростью вращения электродвигателя.
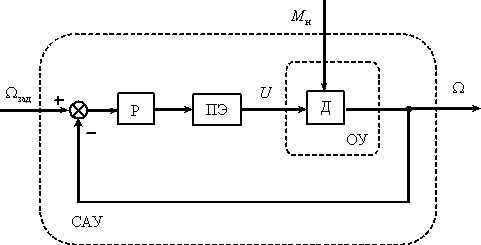
Рис. 29 Одномерная система управления
В
системе, показанной на рис. 29 объектом
управления (ОУ) является электродвигатель
(Д). На двигатель воздействует
преобразователь энергии (ПЭ), приводящий
двигатель в движение и изменяющий
скорость посредством величины напряжения
(![]() ),
подводимого к двигателю. На двигатель
так же воздействует рабочая нагрузка,
создающая на валу двигателя момент (
),
подводимого к двигателю. На двигатель
так же воздействует рабочая нагрузка,
создающая на валу двигателя момент (![]() ),
приводящий к изменению скорости (
),
приводящий к изменению скорости (![]() )
в отличие от заданной скорости (
)
в отличие от заданной скорости (![]() ).
В процессе работы двигателя, при изменении
нагрузки будет меняться и скорость, что
является недопустимым с точки зрения
требований к качеству выпускаемой
продукции, на пример, скорость подачи
металлорежущего станка. В функции
отклонения скорости от задания регулятор
(Р) воздействует на преобразователь
энергии таким образом, чтобы снизить
отклонение скорости.
).
В процессе работы двигателя, при изменении
нагрузки будет меняться и скорость, что
является недопустимым с точки зрения
требований к качеству выпускаемой
продукции, на пример, скорость подачи
металлорежущего станка. В функции
отклонения скорости от задания регулятор
(Р) воздействует на преобразователь
энергии таким образом, чтобы снизить
отклонение скорости.
В этом случае, как система управления в целом, так и объект управления, представляются в виде математической модели, имеющей скалярные вход, выход и возмущающее воздействие.
Для анализа и синтеза в таких системах используют математические модели в виде дифференциальных уравнений, передаточных функций, структурной схемы, частотных и временных характеристик, которые были рассмотрены в нашем курсе ранее.
Общая тенденция развития промышленных устройств состоит в повышении качества и снижении затрат. При повышении качества управления приходится учитывать большее число возмущающих факторов и требуется управлять несколькими переменными объекта. Это должно обеспечивать требования к точности, динамичности, стабильности и экономичности процесса движения вала двигателя. Тогда и объект управления (двигатель) и система управления рассматривается как многомерные.
Структура системы управления скоростью двигателя принимает вид, показанный на рис. 30.
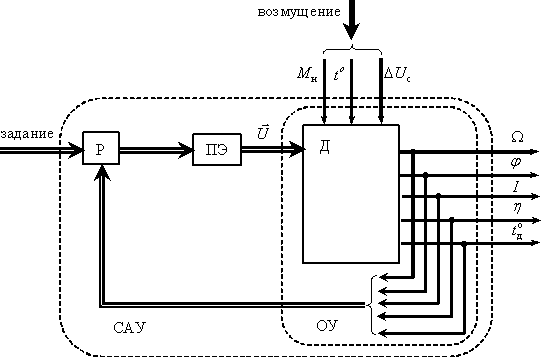
Рис. 30 Структура системы управления скоростью двигателя
Как
мы видим здесь в качестве контролируемых
переменных двигателя не только скорость,
но и угол поворота вала
![]() ,
что часто требуется при точном останове
вала. Также контролируют нагрузку
двигателя по потребляемому току
,
что часто требуется при точном останове
вала. Также контролируют нагрузку
двигателя по потребляемому току
![]() ,
экономичность по коэффициенту полезного
действия
,
экономичность по коэффициенту полезного
действия
![]() ,
нагрев двигателя по температуре двигателя
,
нагрев двигателя по температуре двигателя
![]() .
На систему действует возмущение, имеющее
так же несколько компонент: момент
нагрузки, температура окружающей среды
.
На систему действует возмущение, имеющее
так же несколько компонент: момент
нагрузки, температура окружающей среды
![]() ,
что важно для установок, работающих на
открытом воздухе, и отклонение параметров
питающего преобразователь энергии
источника энергии, что важно для
автономных установок. В этом случае
управляющее воздействие на двигатель
так же является векторной величиной
,
что важно для установок, работающих на
открытом воздухе, и отклонение параметров
питающего преобразователь энергии
источника энергии, что важно для
автономных установок. В этом случае
управляющее воздействие на двигатель
так же является векторной величиной
![]() .
И таким образом обстоит дело не только
в системах электропривода, но и в целом,
при разработке систем автоматизации
промышленных установок.
.
И таким образом обстоит дело не только
в системах электропривода, но и в целом,
при разработке систем автоматизации
промышленных установок.
Во многих случаях разработки промышленных установок решается задача обеспечения заданного качества технологического процесса при минимизации энергетических и экономических затрат. При этом необходимо не только учитывать многочисленные возмущающие объект управления факторы, но и использовать несколько точек приложения управляющих воздействий.
Рассмотрим наиболее характерные примеры многомерных систем в различных отраслях промышленности.
На рис. 31 показана примерная структура установки, которая реализует процесс обработки гибких материалов. Такая структура является характерной для обработки таких материалов, как нить, проволока, ткань, тонколистовой металл, пленки, многослойные материалы.
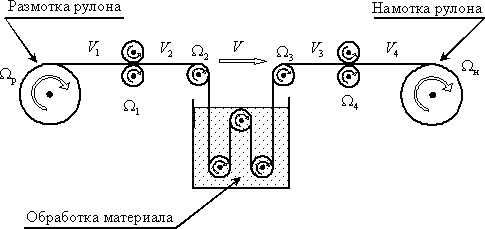
Рис. 31 Структура установки для обработки гибких материалов
Основная
задача таких систем - это стабилизация
скорости обработки материала
![]() с
обеспечением отсутствия деформации
материала. Для этого максимальное
количество вращающихся роликов оснащают
регулируемыми приводами, чтобы с помощью
управляющих воздействий – соотношений
скоростей
с
обеспечением отсутствия деформации
материала. Для этого максимальное
количество вращающихся роликов оснащают
регулируемыми приводами, чтобы с помощью
управляющих воздействий – соотношений
скоростей
![]() ,
воздействовать на линейные скорости
,
воздействовать на линейные скорости
![]() ,
а тем самым и на другие параметры
обрабатываемого материала, особенно
это важно в тех случаях, когда материал
является легко деформируемым, на пример,
обработка марли или бинтов в текстильной
промышленности.
,
а тем самым и на другие параметры
обрабатываемого материала, особенно
это важно в тех случаях, когда материал
является легко деформируемым, на пример,
обработка марли или бинтов в текстильной
промышленности.
На рис. 32 показана типичная кинематическая схема промышленного робота для манипулирования и транспортирования предметов.
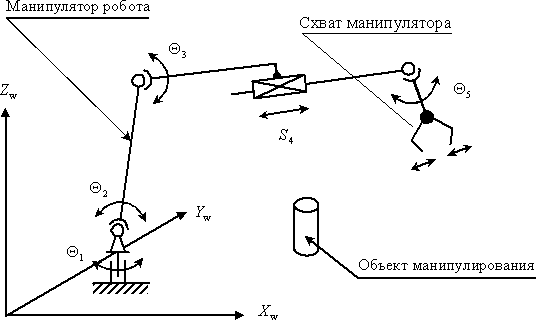
Рис. 32 Кинематическая схема промышленного робота
Основная
задача таких систем перемещение схвата
манипулятора в заданную точку пространства
рабочей зоны робота (![]() ).
Эту задачу можно реализовать, воздействуя
на величины углов поворота и перемещения
в сочленениях манипулятора (
).
Эту задачу можно реализовать, воздействуя
на величины углов поворота и перемещения
в сочленениях манипулятора (![]() ),
с помощью электромеханических,
пневматических или гидравлических
приводов.
),
с помощью электромеханических,
пневматических или гидравлических
приводов.
Таким образом, здесь также мы имеем объект и систему с большим числом входных воздействий, то есть многомерную систему.
Обобщенная структура таких многомерных систем будет иметь вид, показанный на рис. 33.
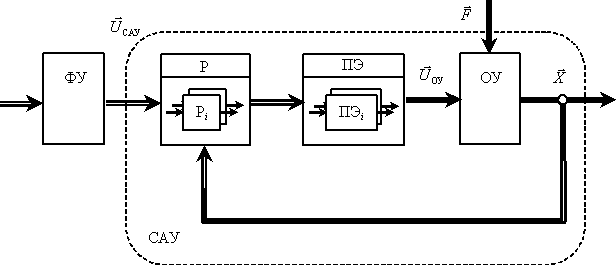
Рис. 33 Обобщенная структура многомерных систем
Блок
формирования управления (ФУ) преобразует
задания оператора в вектор управления
системой
![]() .
Блок регуляторов (Р), действующий в
функции отклонений измеренных регулируемых
величин
.
Блок регуляторов (Р), действующий в
функции отклонений измеренных регулируемых
величин
![]() от
заданных, управляет преобразователями
энергии (ПЭ), которые осуществляют
управляющие воздействия
от
заданных, управляет преобразователями
энергии (ПЭ), которые осуществляют
управляющие воздействия
![]() на
объект управления (ОУ). На объект
управления действуют возмущающие
воздействия
на
объект управления (ОУ). На объект
управления действуют возмущающие
воздействия
![]() .
.