Материал: Основы теории управления. Лопатин Р.С., Федорков Е.Д
![]() .
.
Предполагая для простоты изложения отсутствие комплексно сопряженных корней, можно преобразовать (2) к следующему виду
|
(7.5) |
где
![]() .
.
По выражению для передаточной функции в виде (7.5) получим частотную характеристику объекта –
![]() ,
,
ЛАЧХ
|
(7.6) |
ЛФЧХ
|
(7.7) |
С другой стороны, нам известно, что ЛАЧХ и ЛФЧХ динамических звеньев с передаточными функциями
![]()
имеет вид, показанный на рис. 58, так как звенья являются соответственно форсирующим и апериодическим динамическими звеньями первого порядка.
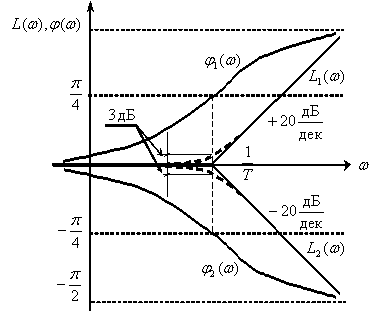
Рис. 58 ЛАЧХ и ЛФЧХ динамических звеньев с передаточными функциями
Исходя из изложенного материала, можно предложить следующую процедуру активной идентификации структуры и параметров линейной системы с одним входом и одним выходом:
- В процессе эксперимента с объекта снимается частотная характеристика в виде ЛАЧХ и ЛФЧХ.
- Полученная
экспериментально ЛАЧХ аппроксимируется
кусочно-линейной кривой - набором
отрезков (асимптот) с целочисленным
наклоном кратным
![]() .
.
При наличии в
полученной ЛАЧХ и ЛФЧХ признаков звеньев
второго порядка, то есть асимптот с
наклоном кратным
![]() ,
необходимо ввести такие звенья в модель.
,
необходимо ввести такие звенья в модель.
Колебательное звено с передаточной функцией
![]() ,
,
имеет ЛАЧХ и ЛФЧХ, показанные на рис. 59.
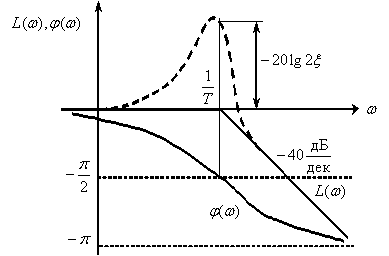
Рис. 59 Частотные характеристики
Форсирующее звено второго порядка с передаточной функцией
![]() ,
,
имеет ЛАЧХ (ЛФЧХ) симметричные показанным на рис.59 характеристикам колебательного звена относительно оси частот.
Рассмотрим пример идентификации по рассмотренной процедуре.
По экспериментально полученной ЛАЧХ объекта определить передаточную функцию.
Решение
Аппроксимируем экспериментальную ЛАЧХ набором асимптот, как это показано на рис. 60.
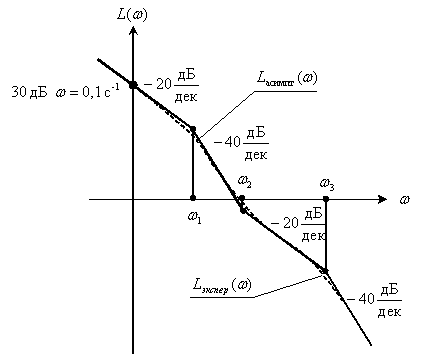
Рис. 60 Частотная характеристика
![]() .
.
На этом интервале наклон асимптоты возрос на 20 дБ/дек, что соответствует добавлению апериодического звена первого порядка с передаточной функцией
![]() ,
,
где постоянная времени определяется по точке сопряжения асимптот –
![]() .
.
![]() .
.
На этом интервале наклон асимптоты уменьшился на 20 дБ/дек, что соответствует добавлению форсирующего звена первого порядка с передаточной функцией
![]() ,
,
где постоянная времени определяется по точке сопряжения асимптот
![]() .
.
![]() .
.
На этом интервале наклон асимптоты возрос на 20 дБ/дек, что соответствует добавлению апериодического звена первого порядка с передаточной функцией
![]() ,
,
где постоянная времени определяется по точке сопряжения асимптот
![]() .
.
Перемножая полученные передаточные функции, получим передаточную функцию объекта
![]() .
.
Заключение
В учебном пособии рассмотрены основные положения теории управления и математические методы, используемые в управлении.
В данном пособии описаны разновидности и свойства систем автоматического регулирования, которые являются основными и не исчерпывают всего многообразия данных систем.
Рассмотрены инженерные задачи, где приходится принимать компромиссные решения, следя за тем, чтобы качественные показатели выходной координаты во времени удовлетворяли заданным требованиям.
Описаны законы изменения управляющего воздействия, при котором обеспечивается заданный алгоритм при наличии возмущающих воздействий.
Также рассмотрены принципы и методы управления, используемые при проектировании автоматических и организационных систем управления.
Библиографический список
1. Теория автоматического управления / под ред. А.А. Воронова. - М.: Высш. шк., 1986. Ч. 1, 2. - 752 с.
2. Математические основы теории автоматического регулирования / под ред. Б.К. Чемоданова. - М.: Высш. шк., 1972. Т. 1, 2. - 576 с.
3. Корн Г. Справочник по математике для научных работников и инженеров / Г. Корн, Т. Корн. - М.: Наука, 1984. - 525 с.
4. Бессекерский В.А., Попов Е.П. Теория систем автоматического регулирования / В.А. Бессекерский, Е.П. Попов. - М.: Наука, 1975. - 327 с.
5. Справочное пособие по теории автоматического регулирования и управления / под ред. П.А. Санковского. - Минск: Высш. шк., 1973. - 536 с
6. Лебедев С.К. Модальные регуляторы и наблюдатели состояния электромеханических систем: метод. указания / С.К. Лебедев, В.Ф. Глазунов. - Иваново: ИЭИ, 1989. - 576 с.
7. Семенов В.В. Математическая теория управления в примерах и задачах / В.В. Семенов, А.В. Пантелеев, А.С. Бортаковский. - М.: МАИ, 1997. - 426 с.
8. Методы классической и современной теории автоматического управления / под ред. Н.Д. Егупова. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2000. - 324 с.
9. Сю Д. Современная теория автоматического управления и ее применение / Д. Сю, А. Мейер - М.: Машиностроение, 1972. - 256 с.
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ 3
1.1. Разновидности и свойства САР 10
1.2. Законы регулирования 12
1.3. Задачи ТАУ, классификация САУ, примеры 15
1.4. Классификация САУ 16
1.4.1. Оптимальные системы автоматического управления 18
1.4.2. Квазиоптимальные САУ 21
1.4.4. Самонастраивающиеся САУ со стабилизацией критерия качества управления 25
1.4.5. Самонастраивающиеся САУ с оптимизацией качества управления 26
1.4.6. Методы исследования и расчет самонастраивающихся САУ 27
1.5. Математические модели объектов и систем управления 29
1.5.1. Общие замечания по объектам 29
1.6. Принципы построения систем автоматического управления 31
1.6.1. Принцип возмущения или регулирование по возмущению 31
1.6.2. Принцип отклонения или регулирование по отклонению (принцип обратной связи) 32
1.6.3. Принцип дуального управления или принцип 34
автоматической оптимизации 34
1.7. Примеры САУ 36
2. ЛИНЕЙНАЯ ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 38
2.1. Классификация линейных систем 38
2.2. Линеаризация нелинейных функций 39
3.1 Временные характеристики САР 42
3.2. Частотные характеристики САР 45
3.3. Разновидность типовых звеньев САР 47
4. УСТОЙЧИВОСТЬ И КАЧЕСТВО САР 51
4.1. Основные условия устойчивости 51
4.2. Критерии устойчивости линейных САУ 53
4.3. Алгебраический критерий устойчивости 53
Гурвица 53
4.4. Частотный критерий устойчивости Михайлова 54
4.5. Частотный критерий устойчивости Найквиста 55
4.6. Оценки качества регулирования 55
4.7. Оценка качества регулирования по косвенным критериям 58
5. АНАЛИЗ И СИНТЕЗ САУ 60
5.1. Корневой метод синтеза 61
5.2. Метод корневых годографов 63
6.1. Процессы, протекающие в системах ЦУ 67
6.2. Особенности динамики цифровых САУ 68
6.3. Методы исследования цифровых САУ 69
7.1.1. Принцип суперпозиции (наложения) 75
7.2. Понятие многомерной системы 80
7.3. Методы оценки качества систем управления 88
7.4.1. Интегральные оценки качества 102
7.5. Определения и задачи идентификации 105
математических моделей 105
БИБЛИОГРАФИЧЕСКИЙ СПИСОК 116
Подписано в печать ___________. 119
Уч.-изд. л. 6,0. 119
Учебное издание
Лопатин Роман Сергеевич
Федорков Евгений Дмитриевич
ОСНОВЫ ТЕОРИИ УПРАВЛЕНИЯ
В авторской редакции
Компьютерный набор Р.С. Лопатина
Подписано в печать ___________.
Уч.-изд. л. 6,0.
ГОУВПО «Воронежский государственный технический
университет»,