Материал: m083700d
Feldbus-Controller 750-837, /02x-000, 750-838, /02x-000 |
• 101 |
Inbetriebnahme |
|
|
|
3.1.8.6 Anwendungsspezifisches Mapping
Anstatt das Default-Mapping zu verwenden, können Sie in einem anwendungsspezifischen PDO-Mapping festlegen, welche Daten mittels PDOs übertragen werden. Dazu sollte sich der Controller in dem Zustand PREOPERATIONAL befinden, bzw. mit dem NMT Service "Enter PreOperational" in diesem Zustand überführt werden.
Die Vorgehensweise für ein anwendungsspezifisches Mapping wird an einem Beispiel konkret erläutert.
Beispiel:
Mit Hilfe der TxPDO 2 soll der 3. und 5. analoge Eingangskanal mit der Datenbreite 2 Byte und die erste 8 Bit digitale Eingangsgruppe gelesen werden. Für die Übertragung soll der CAN Identifier 0x432 benutzt werden. Die Übertragung soll synchron mit jedem dritten SYNC Objekt erfolgen.
Es werden die default CAN IDs für die SDOs verwendet. Die Einstellung wird am Knoten 8 vorgenommen.
xx... wird nicht ausgewertet
1.Deaktivieren Sie zunächst das PDO Mapping, indem Sie die Anzahl der Mappingobjekte in dem Index 0x1A01, Sub-Index 0 (Transmit PDO Mapping Parameter) gleich 0 setzen.
PDO Mapping deaktivieren:
|
CAN ID |
Daten |
Senden |
608 |
0x2F 01 1A 00 00 xx xx xx |
Empfang |
588 |
0x60 01 1A 00 xx xx xx xx |
|
|
|
2.Tragen Sie in die TxPDO Mapping Parameter Struktur (Index 0x1A01) den Index, Sub-Index und die Objektlänge des Anwendungsobjekts ein. Pro PDO können maximal 8 Byte Daten zugewiesen werden.
Mapping Parameter Struktur beschreiben:
Anwendungsobjekt: |
Index |
Sub-Index |
3. analoger Eingangskanal |
0x6401 |
3 |
|
|
|
5. analoger Eingangskanal |
0x6401 |
5 |
|
|
|
1. digitale Eingangsgruppe |
0x6000 |
1 |
|
|
|
3.Dabei muss in den Mapping Parametern des 2. TxPDO die folgende Struktur erreicht werden.
TxPDO Mapping Parameter Structure, Index 0x1A01
|
|
|
|
Anwendungsobjekt |
|
|
|
|
|
|
|
|
Sub-Index: |
|
|
Index: |
|
|
Sub-Index: |
|
|
Objektlänge in Bit |
|
|
0 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
1 |
|
|
0x6401 |
|
3 |
|
|
0x10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
0x6401 |
|
5 |
|
|
0x10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
0x6000 |
|
1 |
|
|
0x08 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
WAGO-I/O-SYSTEM 750
CANopen

102• Feldbus-Controller 750-837, /02x-000, 750-838, /02x-000 Inbetriebnahme
Hinweis
Tragen Sie zuerst die Mapping Parameter Sub-Index 1 ... 8 und erst danach die Anzahl der gültigen Sub-Indizes in den Sub-Index 0 ein.
Diese Objekte werden mit Hilfe von SDO Übertragungen hinterlegt:
3. analoger Eingangskanal mappen
|
|
CAN ID |
Daten |
|
|
Senden |
0x608 |
0x23 01 1A 01 10 03 01 64 |
|
|
|
|
23 |
0 Datenbytes ungültig |
|
|
|
011A |
Index(Lowbyte first) |
|
|
|
01 |
Sub-Index |
|
|
|
10 |
Datenbreite des Analogkanals |
|
|
|
03 |
Sub-Index, wo der 3. Analogkanal |
|
|
|
|
im Manufacturer Device Profile steht |
|
|
|
01 64 Index (Lowbyte first) wo der |
|
|
|
|
|
3. Analogkanal im Manufacturer |
|
|
|
|
Device Profile steht |
|
Empfang |
0x588 |
0x60 01 1A 01 xx xx xx xx |
|
|
|
|
60 |
OK |
|
|
|
011A |
Index(Lowbyte first) |
|
|
|
01 |
Sub-Index |
|
|
|
|
|
|
5. analoger Eingangskanal mappen |
|
|
|
|
|
CAN ID |
Daten |
|
|
Senden |
0x608 |
0x23 01 1A 02 10 05 01 64 |
|
|
Empfang |
0x588 |
0x60 01 1A 02 xx xx xx xx |
|
|
|
|
|
|
|
1. digitale Eingangsgruppe mappen |
|
|
|
|
|
CAN ID |
Daten |
|
|
Senden |
0x608 |
0x23 01 1A 03 08 01 00 60 |
|
|
Empfang |
0x588 |
0x60 01 1A 03 xx xx xx xx |
|
|
|
|||
|
Anzahl der Mappingobjekte = 3, auf Sub-Index 0 eintragen |
|||
|
|
CAN ID |
Daten |
|
|
Senden |
0x608 |
0x2F 01 1A 00 03 xx xx xx |
|
|
Empfang |
0x588 |
0x60 01 1A 00 xx xx xx xx |
|
|
|
|
|
|
4.Um die Kommunikationsparameter zu ändern, deaktivieren Sie nun das PDO, das Sie mappen möchten.
In dem vorliegenden Beispiel ist das das TxPDO2.
Schreiben Sie dazu in das Objekt mit dem Index 0x1801, Sub-Index 01 (Transmit PDO Communication Parameter) den Wert 0x80000000.
PDO deaktivieren:
|
|
CAN ID |
Daten |
|
|
Senden |
608 |
0x23 01 18 01 00 00 00 80 |
|
|
Empfang |
588 |
0x60 01 18 01 xx xx xx xx |
|
|
|
|
|
|
WAGO-I/O-SYSTEM 750
CANopen
Feldbus-Controller 750-837, /02x-000, 750-838, /02x-000 |
• 103 |
Inbetriebnahme |
|
|
|
5.Schreiben Sie nun in das Objekt mit dem Index 0x1801, Sub-Index 1 bis 3 (Transmit PDO Communication Parameter) die Kommunikationsparameter in die Struktur.
Dabei ist der Transmission Type 3 ( Synchrone Übertragung mit jedem 3. SYNC-Object).
Eintragen der Communication Parameter:
TxPDO Communication Parameter, Index 0x1801
|
Sub-Index: |
Wert: |
Bedeutung: |
|
|
0 |
3 |
number of supported entries in the record |
|
|
|
|
|
|
|
1 |
0x432 |
COB-ID used by PDO |
|
|
|
|
|
|
|
2 |
3 |
Transmission Typ |
|
|
|
|
|
|
|
3 |
0 |
Inhibit Time |
|
|
|
|
|
|
|
|
|
|
|
|
Sub-Index 3: Inhibit Time = 0 |
|
|
|
|
|
CAN ID |
Daten |
|
|
Senden |
0x608 |
0x2B 01 18 03 00 00 xx xx |
|
|
Empfang |
0x588 |
0x60 01 18 03 xx xx xx xx |
|
|
|
|
|
|
|
Sub-Index 2: Transmission Typ = 3 |
|
|
|
|
|
CAN ID |
Daten |
|
|
Senden |
0x608 |
0x2F 01 18 02 03 xx xx xx |
|
|
Empfang |
0x588 |
0x60 01 18 02 xx xx xx xx |
|
|
|
|
|
|
Sub-Index 1: COB ID = 432 der PDO festlegen und PDO von ungültig auf gültig setzen
|
CAN ID |
Daten |
Senden |
0x608 |
0x23 01 18 01 32 04 00 00 |
Empfang |
0x588 |
0x60 01 18 01 xx xx xx xx |
|
|
|
6.Sobald Sie mit dem Befehl "Start Remote Node" abschließend den Programmierbaren Feldbus-Controller in den Zustand OPERATIONAL überführen, sind die PDOs aktiv und das TxPDO Objekt kann für die Übertragung von Daten genutzt werden.
WAGO-I/O-SYSTEM 750
CANopen
104• Feldbus-Controller 750-837, /02x-000, 750-838, /02x-000 LED Statusanzeige
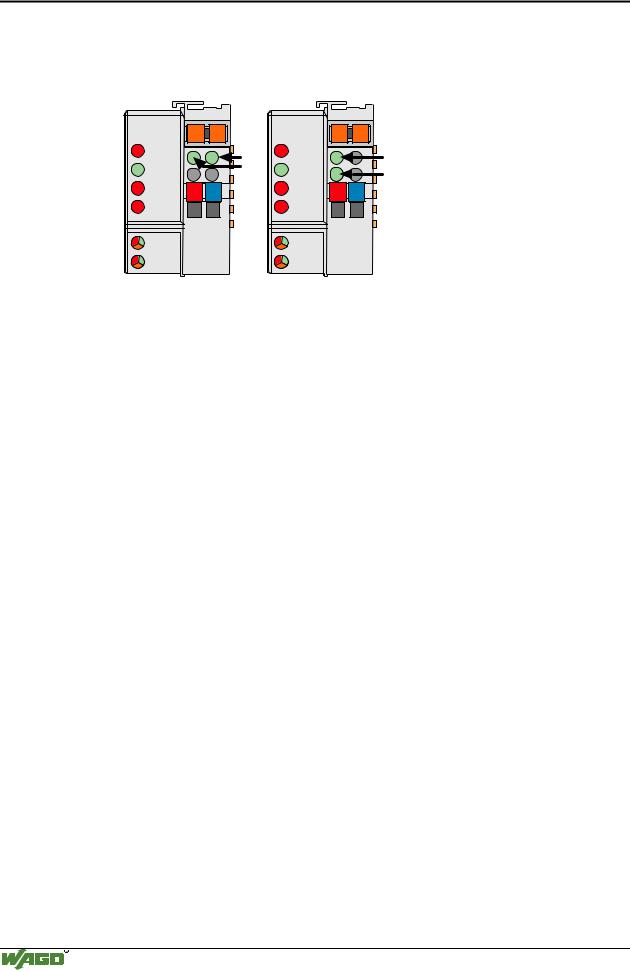
3.1.9 LED Statusanzeige
Für die Vor-Ort-Diagnose besitzt der Controller mehrere LEDs, die den Betriebszustand des Controllers bzw. des ganzen Knotens anzeigen.
CANopen |
01 02 |
|
CANopen |
01 02 |
|
STOP |
A |
C |
STOP |
A |
A |
|
C |
|
C |
||
RUN |
B |
A |
RUN |
B |
B |
D |
D |
||||
TX |
24V 0V |
|
TX |
24V 0V |
|
OVERFLOW |
|
OVERFLOW |
|
||
RX |
|
|
RX |
|
|
I/O |
|
|
I/O |
|
|
USR |
|
|
USR |
|
|
Abb. 3-17:Anzeigeelemente |
|
|
g083702x |
||
Dabei werden zwei Gruppen von LEDs unterschieden.
Die erste Gruppe = Feldbus beinhaltet die einfarbigen LEDs mit der Bezeichnung STOP (rot), RUN (grün), Tx-Overflow (rot) und Rx-Overflow (rot), welche den Betriebszustand der Kommunikation via CAN anzeigen.
Die zweite Gruppe = Klemmenbus besteht aus der dreifarbigen I/O LED (rot/grün/orange). Mittels dieser LED wird der Zustand des Klemmenbus und Softwareausnahmebehandlungen, also den Zustand des Feldbus-Knoten angezeigt.
Die dreifarbige USR-LED kann von einem Anwenderprogramm im programmierbaren Feldbus-Controller angesteuert werden.
Die LEDs, die sich auf der rechten Seite in dem Einspeiseteil des Controllers befinden, zeigen den Status der Versorgungsspannung an.
WAGO-I/O-SYSTEM 750
CANopen

Feldbus-Controller 750-837, /02x-000, 750-838, /02x-000 |
• 105 |
LED Statusanzeige |
|
|
|
3.1.9.1 Feldbusstatus
Der Betriebszustand der Kommunikation via CAN wird über die obere LEDGruppe (STOP, RUN, Txund Rx-Overflow) signalisiert.
STOP |
RUN |
TXOVERF |
RXOVERF |
Bedeutung |
Abhilfe |
AUS |
AUS |
AUS |
AUS |
keine Funktion oder |
Versorgungsspan- |
|
|
|
|
Selbsttest |
nung überprüfen |
|
|
|
|
|
(24V und 0V), |
|
|
|
|
|
Selbsttest abwarten |
AUS |
LANGSAMES |
X |
X |
Modul befindet sich |
|
|
BLINKEN |
|
|
im Zustand PRE- |
|
|
|
|
|
OPERATIONAL |
|
AUS |
LEUCHTET |
X |
X |
Modul befindet sich |
|
|
|
|
|
im Zustand |
|
|
|
|
|
OPERATIONAL |
|
LEUCHTET |
AUS |
X |
X |
Modul befindet sich |
Bei feldbusunabhän- |
|
|
|
|
im Zustand STOP |
gigem Fehler: |
|
|
|
|
oder schwerer |
Klemmen überprü- |
|
|
|
|
Feldbusunabhängi- |
fen, Reset des Kno- |
|
|
|
|
ger Fehler, (z. B. |
ten durchführen, bei |
|
|
|
|
wurde eine Klemme |
Konfigurationsfehler |
|
|
|
|
gezogen), falsche |
selbige überprüfen |
|
|
|
|
Konfiguration |
|
X |
X |
X |
LEUCHTET |
der CAN Empfangs- |
Zeit zwischen zwei |
|
|
|
|
puffer ist übergelau- |
Telegrammen ver- |
|
|
|
|
fen, mit Datenverlust |
größern |
|
|
|
|
ist zu rechnen |
|
X |
X |
LEUCHTET |
X |
der CAN Sendepuf- |
Projektierung des |
|
|
|
|
fer ist übergelaufen, |
Bussystems überprü- |
|
|
|
|
mit Datenverlust ist |
fen, Sendepriorität |
|
|
|
|
zu rechnen |
des Moduls erhöhen |
X |
X |
SCHNELLES |
SCHNELLES |
CAN Controller hat |
Baudrate überprü- |
|
|
BLINKEN |
BLINKEN |
das Warning Level |
fen, Busanschluss |
|
|
im Wechsel |
im Wechsel |
überschritten, zu |
überprüfen, mind. 2 |
|
|
mit |
mit |
viele Fehlertele- |
CAN-Module an das |
|
|
RXOVERF |
TXOVERF |
gramme |
Netz anschließen |
AUS |
SCHNELLES |
X |
X |
Modul befindet sich |
Wechsel in den |
|
BLINKEN |
|
|
im Zustand PRE- |
Zustand |
|
|
|
|
OPERATIONAL, |
OPERATIONAL |
|
|
|
|
Sync/Guard- |
und Sync/Guard- |
|
|
|
|
Nachricht/Heartbeat |
Nachricht/Heartbeat |
|
|
|
|
ist ausgefallen |
wieder aufnehmen |
SCHNELLES |
SCHNELLES |
X |
X |
Modul befindet sich |
Sync/Guard- |
BLINKEN |
BLINKEN |
|
|
im Zustand |
Nachricht/Heartbeat |
|
|
|
|
OPERATIONAL, |
wieder aufnehmen |
|
|
|
|
Sync/Guard- |
|
|
|
|
|
Nachricht/Heartbeat |
|
|
|
|
|
ist ausgefallen |
|
SCHNELLES |
AUS |
X |
X |
Modul befindet sich |
Wechsel in den |
BLINKEN |
|
|
|
im Zustand |
Zustand |
|
|
|
|
STOP, Sync/Guard- |
OPERATIONAL |
|
|
|
|
Nachricht/Heartbeat |
und Sync/Guard- |
|
|
|
|
ist ausgefallen |
Nachricht/Heartbeat |
|
|
|
|
|
wieder aufnehmen |
WAGO-I/O-SYSTEM 750
CANopen