Материал: Конструкция общая корнеев
Конструкция и эксплуатация |
|
воздушных судов для пилотов и |
|
бортинженеров |
7. Управление самолетом |
рующий момент от трим мера, противодействую щий шарнирному моменту, возникает вследствие большого плеча силы, приложенной к триммеру, хотя сам а сила и невелика.
Широкое распространение п олучила осевая компенсация – смещение оси вращения руля от его перед ней кромки (рис. 7.3). Центр давления аэродинам ической силы руля лежит приблизительно на 1/4 его хорды. Если ось вращения руля приблизить к центру давления, то ум еньшится плечо аэродинамической силы. Уменьшение плеча приводит к уменьшению шарнирного мом ента руля, а следовательно, уменьшает нагрузку на рычаг управления рулем.
Рис. 7.3. Схема осевой компенсации элерона
Совмещение оси вращения с центром давления приведет к исчезновению уси лий, а смещение оси вращения за центр давления приведет к изменени ю направления усилий на рычаге управлен ия на противоположные. Это называется «переко мпенсаци ей».
Иногда на части руля или элерона создают перекомпенсацию, что приводит к появлению противопол ожного аэродинамического мом ента на этой части руле вой поверхности и знач ительному умен ьшению усилий на рычаге управления (рис. 7.4). Такая разновидность осевой компенсации получи ла название рого вой и применяется на нескоростных самолетах из-за того, что этот «рог», выходя в набегающий поток, н арушает обтекание аэр одинамической поверхности.
© НИЛ НОТ НИО УВАУ ГА(и), 2009 г |
Составитель: В.М. Корнеев |
61 |
|
Разработчик: С. П. Пугин. |
|
Конструкция и эксплуатация |
|
воздушных судов для пилотов и |
|
бортинженеров |
7. Управление самолетом |
Рис. 7. 4. Схема роговой компенсации элерона
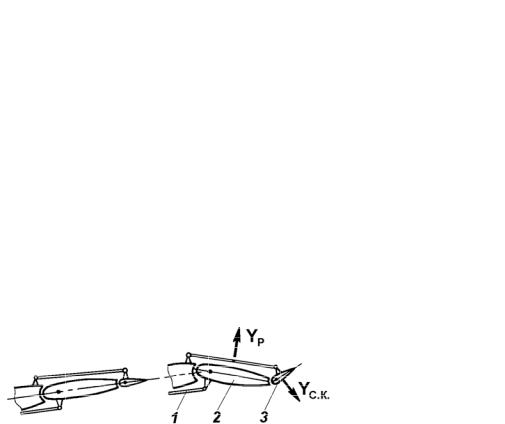
Наряду с осевой компенсацией, применяются сервокомпенсат оры (или флетнеры). Принцип их действия подобен действию триммера (рис. 7.5). В то же время ме жду ними имеет ся существенное различие. Если триммер отклоняется только по командам
|
пилота и |
отклонение руля не вы- |
|
|
зывает поворота тримм ера, то |
||
|
сервокомпенсатор за счет жест- |
||
Рис. 7.5. Схема сервокомпенсатора (флетнера): |
кой тяги |
отклоняется |
всегда в |
1 – тяга управления рулем; 2 – рул ь; |
сторону, |
обратную отклонению |
|
3 – се рвокомпенсатор |
основного руля. |
|
|
|
|
||
Иногда используются триммеры-флетнеры – это флетнеры, |
длина же- |
||
сткой тяги которых может изме няться с помощью электрического привода, и поэтому они могут работать и как триммер, и как сервокомпенсатор.
На тяжелых самолётах используется переставной стабилизатор, отклоняемый пилото м или автоматически. Применени е стабилизатора для балансировки сам олёта позволяет н а всех режимах полёта использов ать весь диапазон возмо жных углов отклонения р уля высоты для манёвра и парирования возмущений.
© НИЛ НОТ НИО УВАУ ГА(и), 2009 г |
Составитель: В.М. Корнеев |
62 |
|
Разработчик: С. П. Пугин. |
|

Конструкция и эксплуатация |
|
воздушных судов для пилотов и |
|
бортинженеров |
7. Управление самолетом |
7.3. Рычаги управления самоле том
На современных самолетах гражданской авиации управление разделяется на две группы – ручное и ножное.
Ручное управление применяют для управления рулём высоты и элеронами (рис. 7.6). Командными рычагами являются штурвальная колонка и штурвал .
Рис. 7.6. Схема ручного управления элеронами и рулями высоты:
1 – штурвальная колонка; 2 – штурвал; 3 – ось вращения штурвала; 4 – механическая проводка от штурвальной колонки до рулей высоты; 5 – руль высоты; 6 – рычаг управления рулем высоты; 7 – элероны; 8, 11 – проводка управления элеронами; 9, 12 – качалка управления элеронами; 10 – подшипники
Вращ ение штурвала влево (против часовой стрелки) приведет к образованию левого крена. Соответственно поворот штурвала вправо ( по часовой стрелке) вызовет появление правого крена.
Перемещение штурвальной к олонки «от себя» вызовет пики рование самолета. И, наоборот, при перемещении штурвальной ко лонки «на себя» самолет будет кабрировать.
Ножное управление предназначено для управления рул ем направления. «Дача» правой ноги вперед приведет к правому развороту.
Таким образом, конструкция управления предусматривает, чтобы изменение положения самолета в пространстве соответствовало естественным реф лексам человека.
© НИЛ НОТ НИО УВАУ ГА(и), 2009 г |
Составитель: В.М. Корнеев |
63 |
|
Разработчик: С. П. Пугин. |
|
Конструкция и эксплуатация |
|
воздушных судов для пилотов и |
|
бортинженеров |
7. Управление самолетом |
Максимальные усилия на рычагах управления, потребные для пилотирования, не должны превышать по абсолютной величине:
35 кгс – в продольном управлении;
20 кгс – в поперечном управлении;
70кгс – в путевом управлении.
7.4.Проводка управления
Проводка управления связывает командные рычаги непосредственно с рулями или гидроусилителями рулей. К ней подключаются исполнительные механизмы систем автоматического управления. Конструкция проводки управления может быть гибкой, жесткой и смешанной.
Гибкая проводка состоит из тросов, роликов, качалок, секторов и других деталей. В этом случае все усилия в системе управления передаются с помощью тросов – стальных канатов, свитых из прядей проволоки.
Преимуществом гибкой проводки является ее малая масса и удобство компоновки проводки. Тросовую проводку можно разместить с помощью роликов и направляющих в удобных и безопасных местах, например под полом кабины, по борту фюзеляжа, в носовой части крыла.
Недостатками гибкой проводки является большое трение и износ в местах перегиба троса, а также необходимость размещения двух тросов для передачи противоположно направленных движений (т.е. гибкую проводку приходится делать двухпроводной). Трос вытягивается в процессе эксплуатации под нагрузкой и нуждается во внимательном уходе, контроле и смене из-за износа. Вследствие различного теплового удлинения стального троса и дюралевой конструкции самолета гибкая проводка дополнительно нагружается. Необходимо устанавливать элементы автоматического регулирования натяжения тросов.
© НИЛ НОТ НИО УВАУ ГА(и), 2009 г |
Составитель: В.М. Корнеев |
64 |
|
Разработчик: С. П. Пугин. |
|

Конструкция и эксплуатация |
|
воздушных судов для пилотов и |
|
бортинженеров |
7. Управление самолетом |
Жесткая проводка состоит из тяг, качалок, рычагов, валов, направляющих устройств и кронштейнов. Так как тяги могут работать на растяжение и на сжатие, то д ля обес печения управлен ия достаточно одной линии тяг.
На практике иногда используют смешанную проводку управ ления в виде со четания жесткой и гибкой проводок.
7.5. Особенности бустерной системы уп равлен ия
С ростом скоростей полета увеличиваются усилия, по требные для отклонения рулев ых поверхностей. Пилот, летящий на самолете с непосредственным, неавтоматическим управлением, замечает это по значительному возрастанию усилий, требуемых для отклонения командных рычагов.
В та ких случаях в систему управлени я включают гидроусилит ели (бустеры), представл яющие собой гидравлическую следящую систему. Гидроусилитель состоит из исполнительного механизма – силового цилиндра двойного действия и распредел ительного, следящего механизм а, чаще всего золотникового тип а (рис. 7.7). Отк лоняя командные рычаги, пилот воздействует на связанный с ними проводкой управления золотник, для отклонения которого требуются незначительные усилия.
Рис. 7.7. Схема работы гидроусилителя:
1 – золотник; 2 – силовой цилиндр; 3 – крепление силового цилиндра; 4 – исполнительный шток с поршнем
© НИЛ НОТ НИО УВАУ ГА(и), 2009 г |
Составитель: В.М. Корнеев |
65 |
|
Разработчик: С. П. Пугин. |
|