Материал: Конструкция общая корнеев
Конструкция и эксплуатация |
|
воздушных судов для пилотов и |
|
бортинженеров |
6. Шасси самолета |
ловыми цилиндрами. Износ тормозных дисков определяется по механическому указателю. При работе тормоза автоматически поддерживается постоянство зазора в заданных пределах в пакете дисков.
При торможении давление в тормозах колёс при неработающей противоюзовой автоматике должно быть пропорционально рабочему ходу тормозных педалей.
На современных колесах для исключения проскальзывания покрышки применяют автоматическое регулирование тормозного момента на пределе «юза».
В случае, когда в процессе торможения колесо вступает в юз, антиюзовый автомат уменьшает давление в тормозах, осуществляя растормаживание колес. При этом обеспечивается минимальный износ колес, максимальный коэффициент трения между колесом и поверхностью аэродрома и, соответственно, минимальная длина пробега.
Все тормозные колёса оборудуются сигнализаторами превышения предельных температур – термосвидетелями, выплавляющимися при темпе-
ратуре 120-130° С.
При выплавлении одного или двух термосвидетелей визуально осматривают борта колеса и шины, тормоз по доступным местам. При отсутствии повреждений колесо допускается к дальнейшей эксплуатации. При выплавлении трех термосвидетелей одновременно на одном колесе шина бракуется. Шина и тормоз колеса тщательно осматриваются, изучаются условия посадки. При удовлетворительном состоянии колесо допускается к дальнейшей эксплуатации. При вторичном выплавлении трех термосвидетелей одновременно колесо и шина бракуются, тормоз направляется в ремонт.
Системы торможения колёс обеспечивают:
−надежное торможение колёс при стоянке, рулении, маневрировании, пробеге, прерванном взлёте, буксировке и перед страгиванием;
© НИЛ НОТ НИО УВАУ ГА(и), 2009 г |
Составитель: В.М. Корнеев |
56 |
|
Разработчик: С. П. Пугин. |
|
Конструкция и эксплуатация |
|
воздушных судов для пилотов и |
|
бортинженеров |
6. Шасси самолета |
−возможность одновременного, а также дифференцированного торможения колёс основных опор шасси;
−затормаживание колес всех опор шасси после отрыва;
−фиксированное торможение самолёта на стоянке. Предусматриваются меры, исключающие возможность посадки само-
лёта с заторможенными колёсами.
Тормоза колес основных опор шасси имеют воздушное принудительное охлаждение. Вентиляторы системы охлаждения смонтированы в осях колес. Включение и выключение вентиляторов производится автоматически, а при необходимости вручную.
Управление основной системой торможения осуществляется педалями, установленными в кабине экипажа. Пилот, отклоняя педали, через передающий механизм воздействует на редукционные клапаны, которые при нажатии тормозной педали на полный ход обеспечивают возможное максимальное давление в тормозах. Для повышения маневренности на рулении управление обеспечивает как одновременное, так и раздельное торможение колес левой и правой основных опор.
6.6. Система поворота колес передней опоры
Система поворота колес передней опоры предназначена для выполнения разворотов на рулении и выдерживании направления на ВПП на взлете и посадке, а также обеспечивает демпфирование колебаний (типа «шимми») колес передней опоры в режиме свободного ориентирования.
Система управления поворотом колес – гидромеханическая, может работать в одном из двух режимов: в рулежном или взлетно-посадочном. Управление поворотом выполняется рукоятками на рулении, а на разбеге и пробеге – педалями ножного управления. При выключенной системе колеса свободно ориентируются при буксировке самолета по рулежной до-
© НИЛ НОТ НИО УВАУ ГА(и), 2009 г |
Составитель: В.М. Корнеев |
57 |
|
Разработчик: С. П. Пугин. |
|
Конструкция и эксплуатация |
|
воздушных судов для пилотов и |
|
бортинженеров |
7. Управление самолетом |
рожке (ВПП). Дросселирование перетекающей жидкости между полостями рулевых цилиндров предотвращает возникновение колебаний колес.
Система управления поворотом колес передней опоры состоит из механической проводки управления распределительно-демпфирующими механизмами, гидравлических рулевых механизмов и механической обратной связи.
При рулежном управлении используется полный ход гидроцилиндров рулевыхмеханизмов, апривзлетно-посадочномуправлении толькочастьхода.
Передние стойки снабжены также специальным механизмом установки колес в направлении полета (в нейтральное положение) при отрыве самолета от земли. Этим обеспечивается совпадение плоскости вращения колес при посадке с направлением движения самолета.
Запрещается управлять передней стойкой шасси до страгивания самолёта с места.
7.УПРАВЛЕНИЕ САМОЛЕТОМ
7.1.Назначение и состав систем управления самолетом
Совокупность устройств, обеспечивающих управление движением самолета, называют системой управления.
Система управления самолетом может быть неавтоматической, полуавтоматической или автоматической.
Если процесс управления осуществляется непосредственно пилотом, т.е. пилот посредством мускульной силы приводит в действие органы управления, обеспечивающие управление самолетом, то система управления называется неавтоматической (прямое управление самолетом). Неавтоматические системы могут быть механическими и гидромеханическими (рис. 7.1). Механические системы – это первые самолётные системы, на
© НИЛ НОТ НИО УВАУ ГА(и), 2009 г |
Составитель: В.М. Корнеев |
58 |
|
Разработчик: С. П. Пугин. |
|

Конструкция и эксплуатация |
|
воздушных судов для пилотов и |
|
бортинженеров |
7. Управление самолетом |
базе которых созданы все современные комплексные системы основного управления. Балансировка и управление здесь осуществляются непосредственно мускульной силой экипажа в течение всего полёта.
а
б
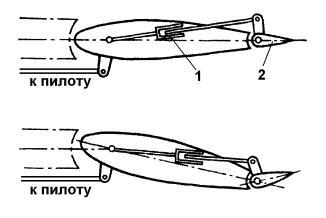
Рис. 7 .1. Неавтоматизированные механическая (а) и гидромеханическая (б) системы основного управления самолетом:
1 – командный рычаг; 2 – тяга проводки управления; 3 – качалка или ро ликовая направляющая; 4 – балансир массы проводки упр авления; 5 – двуплеч ная качалка, компенсирующая температурные изм енения длины гермоотсека ф юзеляжа; 6 – кронш тейн навески руля; 7 – рычаг управления руля; 8 – двуплечий рычаг; 9 – пружинный загружатель командного рычага; 1 0 – механизм тримми рования ( снятия нагрузки); 11 – рулевой привод; 1 – гидравлический золотник; 13 – гидро илиндр
Если процесс управления осуществляется пилотом через механизмы и устройства, обеспечиваю щие и улучшающие качество процесса управления, то система управлен ия называется полуавтом атической.
Если создание и изменение управляющих сил и момен тов осуществляется ком плексом автоматических устройств, а рол ь пилота сводится к контролю за ними, то систе ма управления называется автома тической.
На большинстве современны х скоростных сам олетов применяются полуавтоматические и автоматические системы управления.
Ком плекс бортовых систем и устройств, которые дают возможность пилоту приводить в действие органы управления для изменения режима полета или для балансировки самолета на заданном режиме, называют
© НИЛ НОТ НИО УВАУ ГА(и), 2009 г |
Составитель: В.М. Корнеев |
59 |
|
Разработчик: С. П. Пугин. |
|
Конструкция и эксплуатация |
|
воздушных судов для пилотов и |
|
бортинженеров |
7. Управление самолетом |
системой основного управления самолетом (руль высоты, руль направления, элероны, переставной стабилизатор).
Устройства, обеспечивающие управление дополнительными элементами управления (закрылки, предкрылки, спойлеры) называют вспомогательным управлением или механизацией крыла.
7.2.Особенности конструкции систем управления самолетом
Отклоняя штурвальную колонку на себя или от себя, пилот осуществляет продольное управление, т.е. изменяет угол тангажа (атаки), отклоняя руль высоты или управляемый стабилизатор. Поворачивая штурвал вправо или влево, пилот, отклоняя элероны, осуществляет поперечное управление, накреняя самолет в нужную сторону. Для отклонения руля направления пилот
воздействует на педали.
При длительном полете с отклоненными рулями для снятия усилий с командных рычагов применяются триммеры, которые представляют собой дополнительную рулевую поверхность, устанавливаемую на задней части основного руля (элерона). По коман-
дам пилота триммеры отклоняются на необходимые для снятия усилий углы. Это обеспечивается специальной механической проводкой из кабины экипажа к триммерам или при помощи управляемых из кабины экипажа электромеханизмов (рис. 7.2). Отклоняя триммер в сторону, противоположную отклонению руля, нагрузку, передающуюся на командные рычаги, можно уменьшить до сколько угодно малой величины. Компенси-
© НИЛ НОТ НИО УВАУ ГА(и), 2009 г |
Составитель: В.М. Корнеев |
60 |
|
Разработчик: С. П. Пугин. |
|