Материал: Конструкция общая корнеев
Конструкция и эксплуатация |
|
воздушных судов для пилотов и |
|
бортинженеров |
7. Управление самолетом |
Меха низм перестановки стаб илизатора, состоящий из винтовой пары и планетарных редукторов приводов винта и гайк и, приводится в действие двумя гидромоторами (или электромото рами). Гидромоторы через редукторы вращают раздельно винт и гайку ( рис. 7.10 ). Между редукторами и гидромоторами установлены фри кционные тормоза, фиксирующие винт и гайку д ля остано вки стаб илизатора в заданном положении.
Управление стабилизатором производится переключателями «ПИКИРОВАНИЕ – КАБРИРО ВАНИЕ».
Рис. 7 .10. Система управления стабилизатором самолета Як-42
© НИЛ НОТ НИО УВАУ ГА(и), 2009 г |
Составитель: В.М. Корнеев |
71 |
|
Разработчик: С. П. Пугин. |
|
Конструкция и эксплуатация |
|
воздушных судов для пилотов и |
|
бортинженеров |
7. Управление самолетом |
7.9.Назначение и состав вспомогательного управления самолётом
Вспомогательное управление самолетом (или механизация крыла) предназначено для изменения аэродинамических характеристик самолёта на отдельных этапах полёта.
Работа всех элементов механизации крыла (закрылков, предкрылков и спойлеров) основана на управлении пограничным слоем на поверхности крыла и изменении кривизны профиля крыла.
Закрылки предназначены для улучшения взлетно-посадочных характеристик самолета (уменьшения Vвзл и Vпос и соответственно уменьшения потребной длины ВПП) за счет увеличения коэффициента подъемной силы из-за увеличения кривизны крыла при отклонении закрылков вниз и увеличения площади крыла при выдвижении закрылков назад. Это следует из формулы подъемной силы:
Y =CY ρV2 2 Sкр ,
где Y – подъемная сила;
СY – коэффициент подъемной силы; ρ – плотность воздуха;
V – скорость полета;
Sкр – площадь крыла.
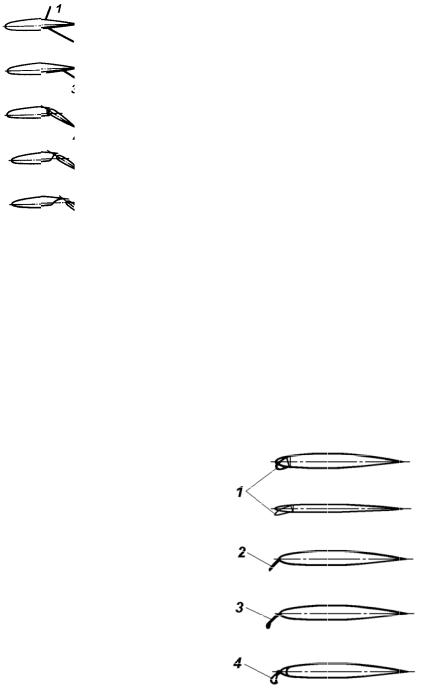
Разновидностью механизации задней части крыла являются поворотные закрылки, щелевые закрылки (без выдвижения, выдвижные одно-, двух-, трёхщелевые), закрылки Фаулера, поворотные и скользящие (выдвижные) щитки (рис. 7.11).
© НИЛ НОТ НИО УВАУ ГА(и), 2009 г |
Составитель: В.М. Корнеев |
72 |
|
Разработчик: С. П. Пугин. |
|
Конструкция и эксплуатация |
|
воздушных судов для пилотов и |
|
бортинженеров |
7. Управление самолетом |
Рис. 7.11. Схемы механизации задней части крыла:
1 – тормозной щиток; 2 – поворотный щиток; 3 – скользящий щиток; 4 – поворот ный закрылок; 5 – щ елевой поворотный закрылок; 6 – выдвижной поворотный закрылок; 7 – закрылок Фаулера; 8 – двухщелевой закрылок; 9 – двухщелевой закр лок в комбинации с интерцептором; 10 – трехщелевой закр ылок
Элементы механизации передней части крыла (рис. 7.12) обеспечивают
ликвидацию ср ыва потока на крыле при больш их углах атаки самолёта. |
||
Разновидностью |
механизации |
перед- |
ней части крыла являются поворотные |
||
носки, предкрылки, носовые |
щитки, |
|
щитки Крюгера. Наиболее эффектив- |
||
ными элементам и механ изации перед- |
||
ней кромки являются предкрылки. |
||
Спойлеры (интерцепторы) – это аэ- |
||
родинамические |
органы управления, |
|
выполненные в виде щи тков, установ- |
Рис. 7.12. Схемы механизации |
ленных на верхней плоскости к рыла и |
передней ч асти крыла: |
– поворотные носки ; 2 – носовой щиток; |
|
поднимающихся вверх под углом к на- |
– щиток Крюгера; 4 – предкрылок |
бегающему потоку, что п риводит к уменьшению подъёмн ой силы крыла. С помощью спойлеров можно изменять вертикальную скорость снижения, уменьшать длину пробега при по садке за счет более эффективного торможения колес шасси и повышать эф фективность управления по крену.
© НИЛ НОТ НИО УВАУ ГА(и), 2009 г |
Составитель: В.М. Корнеев |
73 |
|
Разработчик: С. П. Пугин. |
|
Конструкция и эксплуатация |
|
воздушных судов для пилотов и |
|
бортинженеров |
7. Управление самолетом |
7. 9.1. Управление закрылками
Выпуск и уборка закрылков производится с помощь ю гидро- и электроприводов, которые через тра нсмисси ю вращают винт овые механизмы, переме щающие закрылки назад и вниз (рис. 7.13).
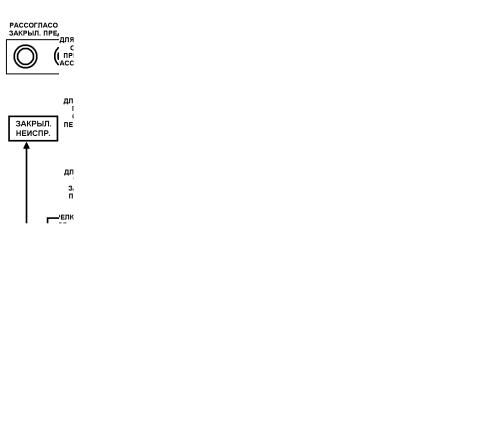
Рис. 7.13. Система управления закрылками самолета
Управление закрылками осу ществляется с помощью рукоятки управления, которую устанавливают на заданный взлётный или посадочный угол отклонения закрыл ков.
Контроль за положением закрылков осуществляется по приборам и сигнализации. При рассинхронизации закрылков срабатывает система предельного рассогласования, которая включает сигнал изацию, останавливает закрылки и включает противоуборочные тормоза.
© НИЛ НОТ НИО УВАУ ГА(и), 2009 г |
Составитель: В.М. Корнеев |
74 |
|
Разработчик: С. П. Пугин. |
|
Конструкция и эксплуатация |
|
воздушных судов для пилотов и |
|
бортинженеров |
7. Управление самолетом |
7.9.2. Управление предкрылками
Предкрылки могут быть установлены по всему размаху крыла или по его части.
Отклонение предкрылков производится с помощью гидроили электроприводов, которые через трансмиссию вращают винтовые механизмы, перемещающие предкрылки вперёд и вниз. Профиль отклонения предкрылков задаётся направляющими рельсами.
В настоящее время на современных самолётах используется система совмещённого управления закрылками и предкрылками, которая выдаёт команду на выпуск или уборку предкрылков от рычага управления закрылками.
Контроль за выпущенным или убранным положением предкрылков осуществляется по сигнализации. В случае рассинхронизации предкрылков, так же, как и в системе управления закрылками, срабатывает система предельного рассогласования.
7.9.3. Управление спойлерами
Управление спойлерами – следящее и осуществляется с помощью бустеров.
Управление спойлерами в элеронном режиме осуществляется штурвалами; в тормозном режиме – ручкой управления, расположенной на центральном пульте; в совместном режиме – от штурвалов и ручки одновременно (рис. 7.14). В элеронном режиме спойлер поднимается на том крыле, где элерон отклоняется вверх. В тормозном режиме спойлеры поднимаются на обоих крыльях пропорционально ходу ручки. В совместном режиме углы отклонения спойлеров того крыла, где элерон отклонился вверх, складываются из углов отклонения в элеронном и тормозном режимах.
© НИЛ НОТ НИО УВАУ ГА(и), 2009 г |
Составитель: В.М. Корнеев |
75 |
|
Разработчик: С. П. Пугин. |
|