Материал: Измерительная фурма ККО ММК
Номинальный угол регулирования находится по формуле (4.8):
αн
= arccos ;
(4.8)
;
(4.8)
αн = arccos = 33,575°.
= 33,575°.
Угол коммутации тиристоров при Imax=λi·Iн находится по формуле (4.9):
γ=arccos -
- ;
(4.9)
;
(4.9)
γ
= arccos -
- =12°.
=12°.
Максимальное значение угла регулирования находится по формуле (4.10):
αmax =180° - (γ+ δ +∆а); (4.10)
αmax = 180° -(l2°+3°+3°)= 162°.
где, ∆α=3° - допустимая асимметрия импульсов,
δ - угол восстановления запирающих свойств тиристора:
Максимальная ЭДС тиристорного преобразователя с точки зрения безопасного инвертирования при αmах=155° находится по формуле (4.11):
Edmax =EdoCOSαmax; (4.11)
Edmax = 561,6·cosl62° =-534.1В.
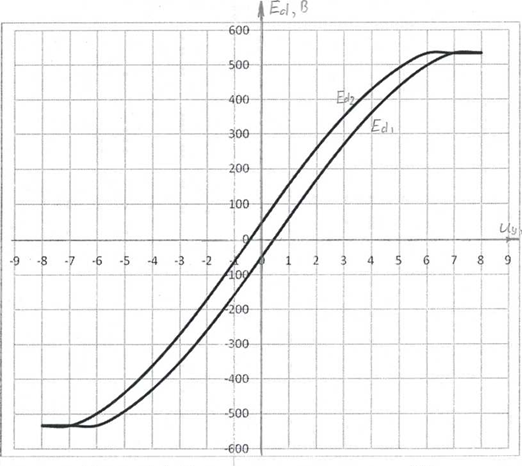
Рисунок 4.2 – Регулировочные характеристики тиристорного преобразователя
5 Защита электропривода
5.1 Требования к защите электропривода
Инвертор защищен от внутренних и внешних аварийных ситуаций. Причинами внутренних аварий являются ошибки всех типов тиристоров. Это включает в себя: нехватку тиристоров на мосту, прямолинейное вращение на параллельных мостах для замены тиристорной линии различными группами управления. Внешние факторы, связанные с внешними факторами: перегруженность недопустима; Ток прямого и непрямого вращения; Версия с одной фазой и двумя инверторами.
Чрезвычайные ситуации могут возникать, например, из-за недопустимых значений и недопустимого времени, которое может быть вызвано клапанами при переключении клапана.
- короткие и внутренние колеса;
- преобразователи;
Ток больше ТП замкнут и нормален для тиристорных групп;
- Прекращение работы группы по безработице тиристоров (Group Group Group). Задний ход и управление различными группами клапанов.
Кто. Учитывая, что тирист теряет свои качества, чтобы блокировать и структурировать pn (пробой тиристора).
Причинами выхода из строя тиристора могут быть: максимальное увеличение тока (более 20 20 200 А / мкс), повреждение механической целостности структуры pn при перегрузке по току, усталостная усталость при жестких нагрузках.
Инвертирующий инвертор - это повреждение правого переключателя с одного клапана на другой. В инверторном классе третьего класса вы можете работать с однофазными компонентами и двумя фазами. В первом случае аварийное питание протекает через два тиристора, которые подключены к одной фазе трансформатора, что в этом случае не рекомендуется. Во втором случае теперь есть два тиристора и две фазы трансформатора. На стороне альтернативы по току ток короткого замыкания быстро увеличивается, когда напряжение трансформатора трансформатора соответствует напряжению источника постоянного тока.
Инверсия инвертора происходит путем прыжка, чтобы открыть другой тиристор (в трехфазной фазе, которая вызывает две фазы, а затем одну фазу). Испытание переменным током уменьшается, что приводит к увеличению тока инвертора и переключателя, который может вызвать взаимодействие инвертора.
Причиной отклоняющего преобразователя может быть увеличение управляющего напряжения путем управления фазой в направлении увеличенного угла подачи и поворота тиристора под воздействием контроля, перенапряжения или высокого уровня тиристора при воздействии паразитических патогенов. Фронт Направление.
Цикл горизонтального вращения происходит в общих кнопках управления из-за повреждения α1 + α2 ≥ 180 °, которое вызывает постоянное появление текущих измерений измерения при симметричном измерении и быстрое увеличение скорости для аварийного питания.
Открытие тиристоров в группе безработных (группа открытых групп) в преобразователях и контроллерах группы клапанов происходит, когда они получают регулирующие раны, связанные с различными ошибками управления или временным исчезновением, и восстанавливают требуемое напряжение.
Требования к защите
Защита инвертора должна осуществляться от КЗ, в то время как между тиристорными группами и когда инвертор выключен, имеется сбой тока. С коротким внешним кругом. Защита инвертора должна отключить инвертор со стороны постоянного тока.
Также с внешним коротким замыканием. желаемое местоположение аварийного источника питания на месте (избегая прохождения аварийного питания к следующему в порядке переключения цепи клапана) и время (ограничение тока короткого замыкания первой полуволны), которое должно быть обеспечено с помощью управляющего устройства для управляющего электрода или снятых сдвигов на край от управляющих импульсов режима инвертора. Если инвертор опрокидывается, эта защита неэффективна.
5.2 Защита от коротких замыканий
Представители цепей представляют собой обычное защитное устройство для защиты клапана привода от внешних внешних цепей, что приводит к отключению питания инверторов и перегрузок. Переключатель находится на стороне переменного тока и подключен.
На переменном токе ножки тиристора переключитесь непосредственно на установленный QF1 (рис. 1.3) тип BA52--33-3 U3, трехмерную версию и теперь рассчитанный на напряжение 160 А, напряжение 380. для электричества меньше чем λi · IH / kt = 2 5-274 / 0,913 = 750A.
Со стороны постоянного тока, циркуляция цепи QF2 (рисунок 1.3) биполярного BA52-37-2 ZZ для номинального напряжения 220 В и тока 400 A установленной скорости. Есть теплая поездка до нынешних 300 А; Значение тока короткого замыкания не менее λi · IH = 3-274 = 810 А.
Тиристоры представляют собой плавкие предохранители F (рисунок 4.1 и рисунок 5.1) для формы PP57-3737, в настоящее время рассчитанные на напряжение 250 А, напряжение 220 В, в настоящее время испытанные предохранители не менее 315 А. Защищено
Современный KTE-16 / 220-9-UHL4 на стороне переменного тока защищен схемой цикла QF3 (рисунок 4.1). Тип Ak63-2M в настоящее время тестируется на 6 А, а текущий контроль на 8 А.
5.3 Защита от перенапряжений.
Для защиты клапанов от переключающих перенапряжений используются RC-цепи, которые подключаются параллельно тиристорам (см. Рисунок 5.1).
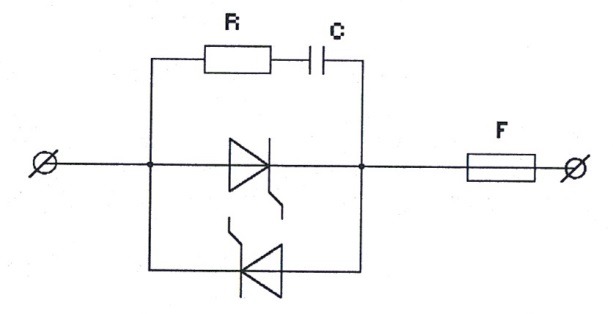
Рисунок 5.1- Схема включения RC – цепочки
Устройства накопления энергии часто используются для ограничения перенапряжений на трансформаторе - конденсаторах, которые являются частью цепей RC. Для защиты от переключения перенапряжений от сети при переключении трансформаторов и цепей нагрузки цепи RC на вторичной стороне трансформатора переключаются в соответствии со схемой на рисунке 5.2.
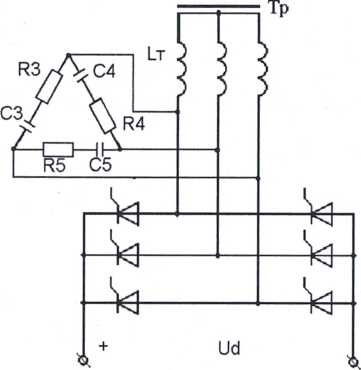
Рисунок 5.2 - Схемы включения RC – цепочек
5.4 Защита от обрыва поля
Реле минимального тока RM подключено последовательно с обмоткой возбуждения двигателя REV830 (рисунок 4.1) для номинального тока 6А. Установленный ток отключения составляет не менее 0,85 · I² = 0,85-5,5 = 4,6 А. Контакты этого реле воздействуют на магнитную цепь линейного контактора KL, установленного в цепи якоря двигателя.
5.5 Контроль изоляции
Изолирующий блок управления цепи выпрямленного тока к массе установлен на стороне постоянного тока привода (Рисунок 5.3). Управление осуществляется с помощью реле с двумя обмотками типа KV1 PH-55/200, катушки которого соединены последовательно и последовательно с резисторами R1, R2 для напряжения моста и центр которых соединен через миллиметр PA2 с землей.
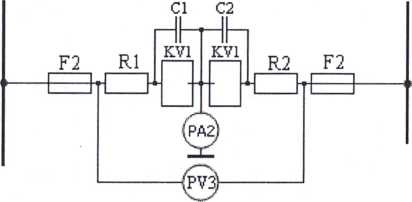
Рисунок 5.3- Контроль изоляции
6 Анализ динамики электропривода
6.1 Выбор структуры сар и разработка основных параметров
В соответствии с технологическими требованиями САР электропривода должно обеспечивать точное управление скоростью опускания и подъемом измерительной насадки.
Точность остановки форсунки и время опускания или увеличения скорости подъема (опускания) форсунки достигаются с помощью ограничительных ключей, установленных вдоль пути перемещения форсунки. Управляющий сигнал того или другого концевого выключателя поступает в схему обработки сигнала задания, а затем на вход автоматического управления для электропривода измерительной насадки.
Электропривод электрически защищен концевыми выключателями от недопустимо больших перемещений. В последнем изломе металлические упоры прикрепляются к направляющим снизу и сверху.
Ручной подъем измерительной насадки в аварийной ситуации осуществляется с помощью специальной храповой лебедки, которая установлена на той же платформе 5, что и электропривод насадки.
Скорость АТС состоит из регулятора скорости и регулятора тока.
Сигнал задания на увеличение или уменьшение скорости формируется системой цеха автоматического управления технологическими режимами работы, а также концевыми выключателями, установленными вдоль пути сопла.
Опорный сигнал подается на вход устройства управления интенсивностью скорости ЗИ, на котором формируется необходимая скорость ускорения привода (ускорение). Напряжение обратной связи по скорости двигателя обеспечивается импульсным датчиком (энкодером), установленным соосно с валом двигателя. Разница между заданным напряжением скорости и обратным напряжением задается на входе ПК контроллера скорости.
Чтобы ограничить максимальное значение тока якоря двигателя, мощность регулятора скорости ограничена.
Внутренней цепью управления является цепь управления током якоря двигателя. Когда необходимо ограничить скорость изменения тока якоря (для облегчения переключения двигателя), регулятор тока также устанавливается на входе регулятора тока.
Вход регулятора тока подается разность текущего опорного напряжения и тока обратной связи. Последнее напряжение генерируется датчиком тока якоря в цепи якоря двигателя.
Следующая реализация такого функционального графа возможна с модулями управления SINAMICS DCM. Корпус содержит микропроцессорную цифровую систему управления SINAMICS DCM от Siemens. Функциональная схема электрического измерительного сопла показана на рисунке 6.1.
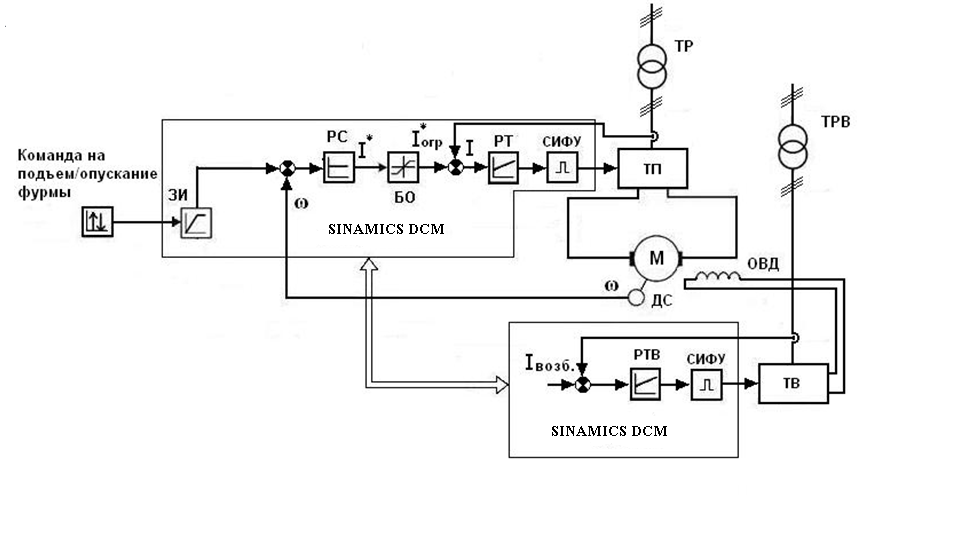
Рисунок 6.1 - Функциональная схема электропривода измерительной фурмы.
6.2 Расчёт структурной схемы сар и выбор параметров регуляторов
Динамический коэффициент усиления ТП находится по формуле (6.1):
 (6.1)
(6.1)

Постоянная времени ТП принимается Тμ = 0,0033 с.
Эквивалентная индуктивность цепи выпрямления находится по формуле (6.1):
 (6.2)
(6.2)

Эквивалентное сопротивление якорной цепи двигателя находится по формуле (6.3):
 (6.3)
(6.3)

где Rя – сопротивление якорной цепи при рабочей температуре 85˚С.
Сопротивление якорной цепи при рабочей температуре 85˚С находится по формуле (6.4):
 (6.4)
(6.4)
где β – температурный коэффициент изменения сопротивления двигателей серии Д.
Эквивалентная электромагнитная постоянная времени цепи выпрямления находится по формуле (6.5):
 (6.5)
(6.5)
Электромеханическая постоянная времени электропривода находится по формуле (6.6):
 (6.6)
(6.6)
6.2.1 Расчет контура регулирования якорного тока
В электроприводах КТЭ используется ПИ-регулятор тока. Структурная схема контура регулирования якорного тока представлена на рисунке 6.2.
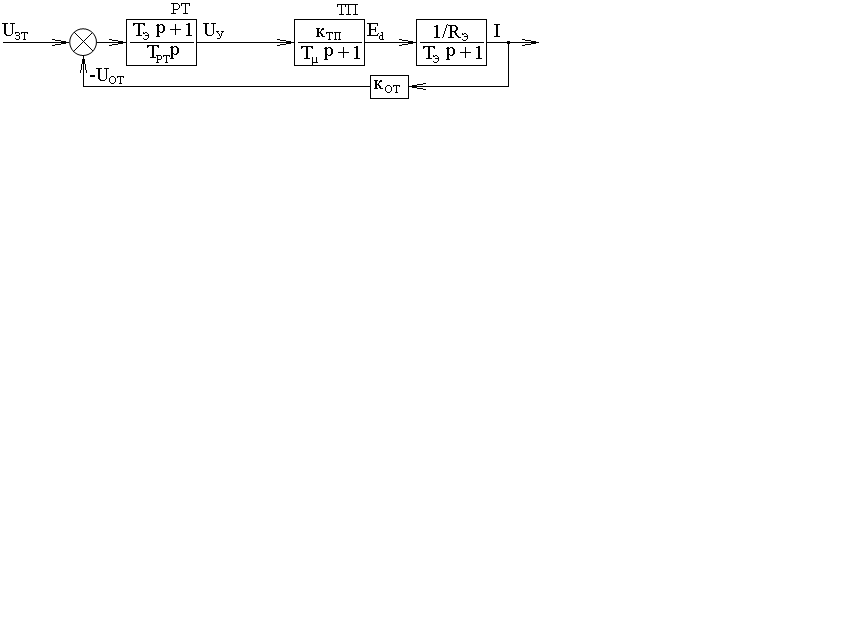
Рисунок 6.2 – Контур регулирования якорного тока