Материал: Измерительная фурма ККО ММК
Сигнал по току снимается с датчиков тока . Коэффициент передачи цепи обратной связи по току находится по формуле (6.7):
 (6.7)
(6.7)
где, Imax – максимальный ток электродвигателя.
Передаточная функция регулятора тока находится по формуле (6.8):
 (6.8)
(6.8)

6.2.2 Оценка влияния эдс двигателя
При учёте ЭДС двигателя просадка тока ΔI в установившихся режимах работы привода находится по формуле (6.9):
 (6.9)
(6.9)

Так как по требованиям допустимая просадка тока составляет 5%, то в компенсации влияния ЭДС двигателя нет необходимости.
6.2.3 Задатчик интенсивности якорного тока
Скорость увеличения тока якоря влияет на операцию переключения двигателя. Поэтому для качественного переключения величина производной тока в цепи якоря должна быть ограничена. Величина производной тока якоря оценивается по формуле (6.10).
 (6.10)
(6.10)
Так как по заданию на проект производная якорного тока ограничивается величиной равной 200 Iн/с, то на вход регулятора тока необходимо ставить задатчик интенсивности тока, структурная схема которого представлена на рисунке 6.3.
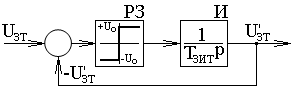
Рисунок 6.3 – Задатчик интенсивности якорного тока
Напряжение ограничения Uо задатчика интенсивности тока составляет 8 В, тогда постоянная времени ЗИТ находится по следующей формуле (6.11)
 (6.11)
(6.11)

где (diа*/dt)доп – допустимая величина скорости нарастания якорного тока.
6.2.4 Регулятор тока
Просадка скорости для П–РС для статического тока, равного номинальному току двигателя, находится по формуле (6.12):
 (6.12)
(6.12)
Поскольку это значение не превышает допустимого значения, достаточно использовать регулятор скорости P.
Блок-схема контура управления скоростью с P-регулятором скорости показана на рисунке 6.4. Контур управления скоростью содержит замкнутый внутренний контур, который контролирует ток якоря LCTR.
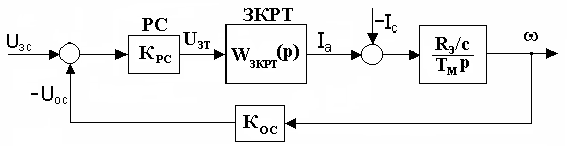
Рисунок 6.4 – Контур регулирования скорости с П-регулятором
Коэффициент обратной связи по скорости находится по формуле (6.13):
 (6.13)
(6.13)
где, Uзс– максимальное значение напряжения задания на скорость.
Коэффициент регулятора скорости крс находится по формуле (6.14):
 (6.14)
(6.14)

6.2.5 Задатчик интенсивности скорости
Для ограничения максимального значения ускорения привода, перед регулятором скорости устанавливается задатчик интенсивности скорости (ЗИС), структурная схема которого представлена на рисунке 6.5.
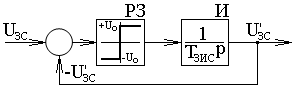
Рисунок 6.5 – Задатчик интенсивности скорости
Допустимый динамический ток, согласно требованиям, не должен превышать величину равную 1,5·Iн, тогда максимальное ускорение привода находится по формуле (6.15):
 (6.15)
(6.15)
Постоянная времени задатчика интенсивности скорости найдётся по формуле (6.16):
 (6.16)
(6.16)
где U0 = 8 В – напряжение ограничения ЗИС.
Общая структурная схема САР электропривода представлена на рисунке 6.6.
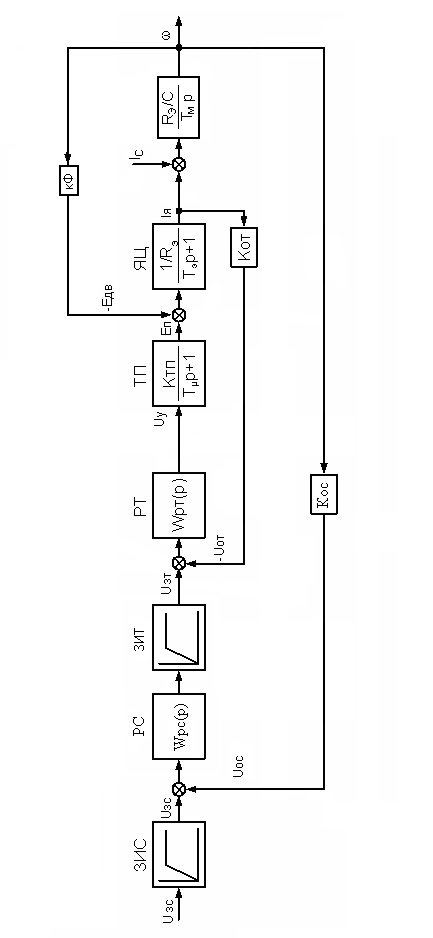
Рисунок 6.6 – САР электропривода подъема измерительной фурмы
6.3 Реализация схемы сар электропривода
6.3.1 Задатчик интенсивности скорости
Регулятор интенсивности установлен на входе регулятора скорости и служит для ограничения крутящего момента в переходных режимах и для обеспечения необходимого времени разгона привода. Скорость отображения интенсивности задается временем ускорения и замедления.
Регулятор интенсивности скорости преобразует входную задачу с резким изменением сигнала задачи, который непрерывно изменяется с течением времени. Время ускорения и замедления может быть установлено независимо. Все времена регулировки интенсивности устанавливаются независимо. Для времени установки интенсивности доступны три блока параметров, которые могут быть выбраны через входы двоичного выбора или через последовательный интерфейс (через бинектор). Кроме того, выход регулятора интенсивности сглаживается в начале и в конце ускорения.
Переключение параметров датчика ускорения может происходить во время работы. Параметры настройки интенсивности режима работы устанавливаются таким образом, чтобы не задерживать передачу стандартного значения на вход регулятора скорости. Если вы вводите время датчика ускорения, равное нулю, заданное значение скорости передается непосредственно в регулятор скорости. Функциональная схема регулятора интенсивности показана на рисунке 6.1.
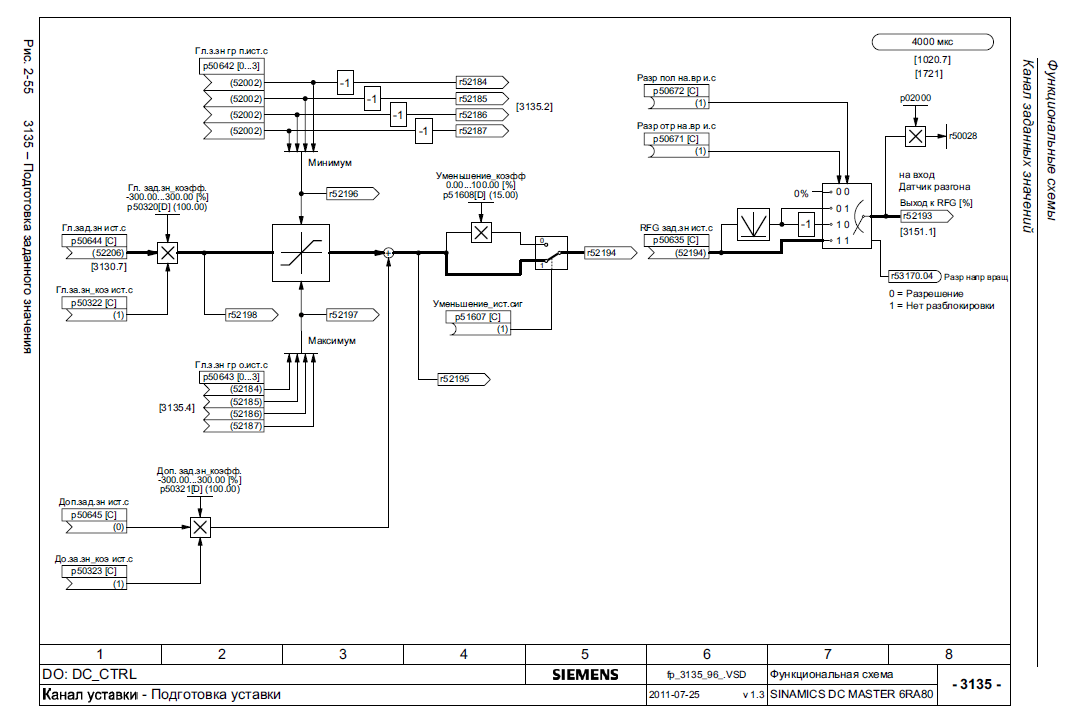
Рисунок 6.1 - Функциональная схема задатчика интенсивности
6.3.2 Регулятор скорости
Регулятор скорости сравнивает заданное значение и текущее значение скорости и, в случае отклонения, выдает текущему контроллеру соответствующее заданное значение тока (принцип: управление скоростью через вспомогательный регулятор тока). Регулятор скорости выполнен в виде P-регулятора. Все параметры контроллера могут быть настроены независимо. Значение Kp (усиление) можно регулировать в зависимости от сигнала подключения (внешнего или внутреннего). В этом случае P-усиление регулятора скорости может быть установлено в соответствии с текущим значением скорости, текущим значением, разницей между установленным значением и текущим значением.
Это управляемо для высокой динамики контура управления. Для этого, ток опорное значение добавляется, например, в зависимости от трения и инерции привода в соответствии с регулятором скорости. Определение компенсации трения и инерции может быть выполнено как часть автоматической оптимизации. Выходное значение регулятора скорости можно настроить сразу после разблокировки регулятора через параметры.
В зависимости от параметризации вы можете снять регулятор скорости и настроить инвертор в соответствии с крутящим моментом или током. Кроме того, можно переключать управление скоростью и управление крутящим моментом во время работы с помощью функции выбора главного / подчиненного. Функция выбирается как бинектор через клемму двоичного выбора или через последовательный интерфейс. Текущее задание вводится через выбираемый порт и может быть получено через аналоговый терминал или аналоговый интерфейс.
В подчиненном режиме (режим управления крутящим моментом или током) действует ограничение контроллера. В этом случае, в зависимости от ограничения скорости, установленного в параметрах, на контроллер можно воздействовать, чтобы избежать недопустимых расстояний движения. Привод ограничивается отклонением скорости. Функциональная схема регулятора скорости приведена на рис. 6.2, 6.3.
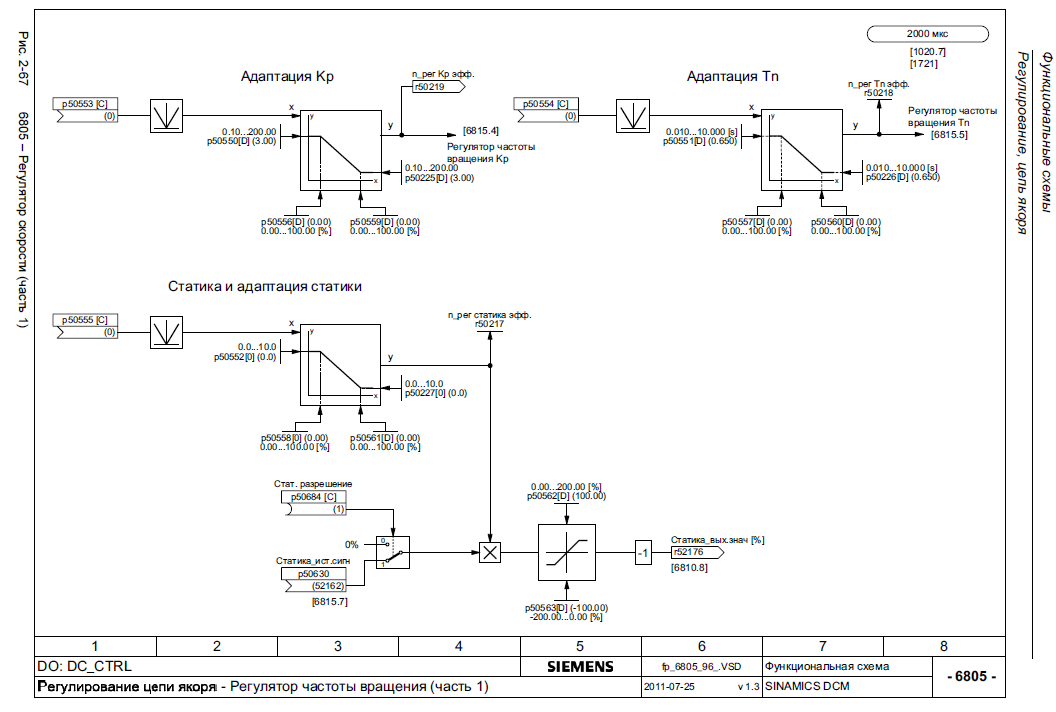
Рисунок 6.2 - Функциональная схема регулятора скорости
Рисунок 6.3 - Функциональная схема регулятора скорости
6.3.4 Регулятор тока
Текущий контроллер создан как контролер ПИ и пособий по самовосстановлению и своевременного контроля. В этом случае компоненты P и I могут отключиться (управление P или I). Текущее значение определяется трансформатором тока и нагрузкой на стороне переменного тока и используется для преобразования A / D. Разрешение АЦП в настоящее время проверяется на изменение в 10 бит. Текущий ограничитель используется в качестве текущей работы.
Выход контроллера тока поступает на вход блока управления, который создает угол управления, а второй центр управления выполняет ту же функцию, что и этот центр («управление с двумя преимуществами»).
«Double Gain Control» в текущей линии управления улучшает динамику управления. Это позволяет установить время таймера от 6 до 9 мс. Двойной контроль доступа работает в соответствии с током и напряжением электромобилей и, благодаря этому контролю, обеспечивает короткий и непрерывный контроль и, даже если время меняется, введите желаемый угол управления в блок управления.
Блок управления вырабатывает регуляторные язвы для тиристоров силового агрегата, синхронно и напряжения сети. Взаимодействие не зависит от окружающего поля и источника энергии и проявляется по мощности. Угол контрольной точки для времени зависит от значения управления регулятором тока и управления двумя преимуществами. Контроль снизился по параметру. Блок управления переключается на частоту вращения 45 ... 65 Гц. После запроса вы можете установить максимальную скорость вращения сети от 23 до 110 Гц через параметры. Текущий рабочий лист контроллера показан на диаграмме. 6.4, 6.5.
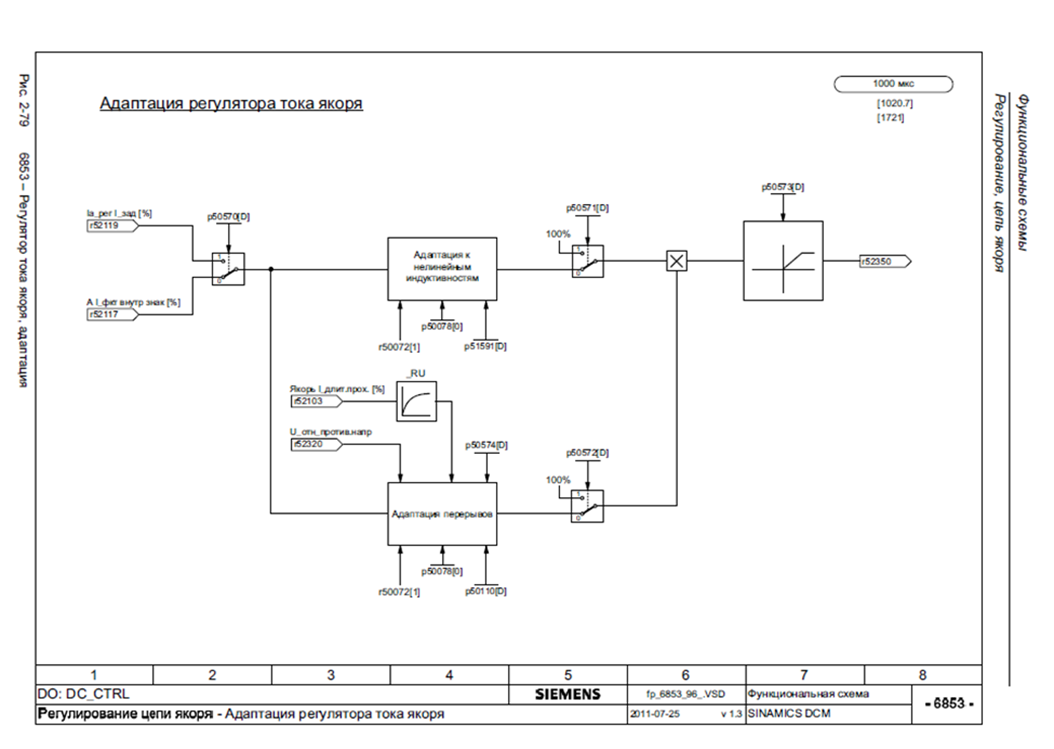
Рисунок 6.4 – Функциональная схема регулятора тока
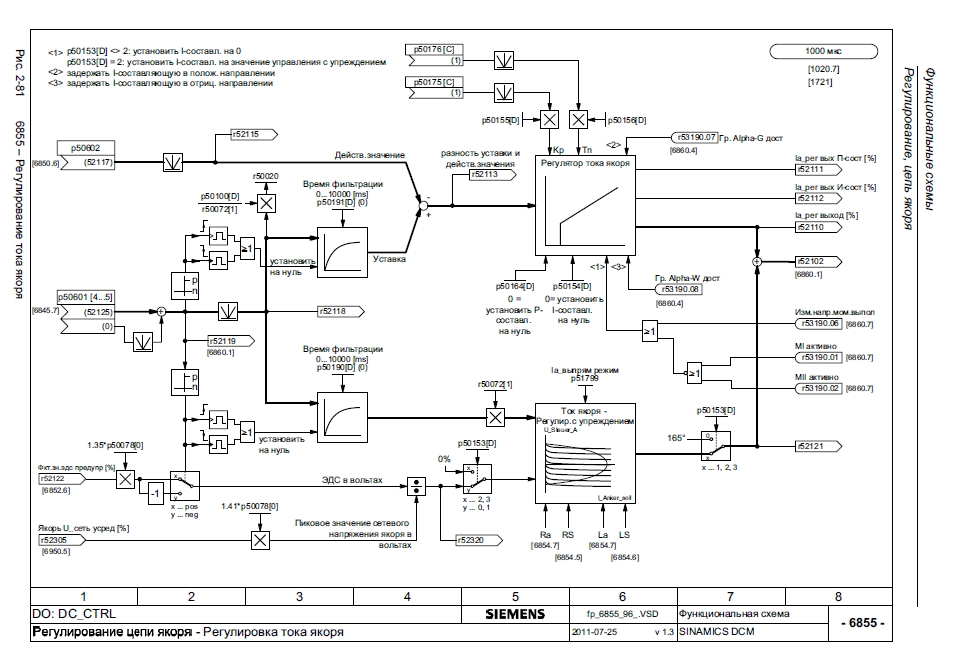
Рисунок 6.5 - Функциональная схема регулятора тока