Материал: Измерительная фурма ККО ММК
1.3 Краткая характеристика механизмов машины замера параметров плавки
1.3.1 Механизм перемещения измерительной фурмы
Измерительная трубка установлена на каретке, оборудованной двумя парами роликов, и перемещается вдоль направляющей, установленной в опорных кронштейнах поворотной колонны.
Каретка подвешена на тросе на барабане, который приводится в движение электродвигателем постоянного тока D814 через дифференциальную передачу с передаточным числом il = 4,3. Через ту же коробку передач, но с передаточным отношением i2 = 93, барабан может приводиться в движение с помощью двигателя переменного тока 4MTKN 160M8, который предназначен для извлечения сопла из преобразователя в случае отказа основного привода.
Конкретное положение форсунки фиксируется с помощью тормозов TKG-500 и TKG-300 для основного или аварийного привода. Помимо функции фиксации механизма в остановленном положении, тормоза служат для исключения возможности передачи вращения одного двигателя другому, когда барабан заблокирован.
Для управления тяговым приводом и блокировки другими механизмами предусмотрен путевой выключатель VPF 11-01-182151-54.
Передаточное число встроенного редуктора переключателя i = 15 обеспечивает вращение вала переключения на 0,88 оборота при полном копье сопла.
Аварийное ограничение движения копья осуществляется с помощью трехпозиционных переключателей VP16E23A231-55U3.2 SQ41, SQ42 и SQ47. SQ41 спроектирован таким образом, что главный двигатель в крайнем верхнем положении автомобиля с соплом выключен. SQ 42 - для реверса основного двигателя в нижнем положении форсунки. SQ 47- был разработан для деактивации аварийного двигателя в крайнем верхнем положении автомобиля с фурмой.
При поломке и свободном падении автомобиля это обеспечивается защитным устройством. В то же время, как и при любом ослаблении каната, соединенного с подвеской ползуна с помощью насадки во время опускания, датчик натяжения каната SQ 48 работает на концевом выключателе типа VP16E23A231-55U3.2.
Чтобы обеспечить требуемый диапазон и точность для поддержания этой скорости фурмы, тахогенератор постоянного тока TP212 установлен на заднем конце вала двигателя. Возбуждение тахогенератора постоянными магнитами. Кинематическая схема механизма подъёма измерительной фурмы представлена на рисунке 1.3.
Барабан 600мм
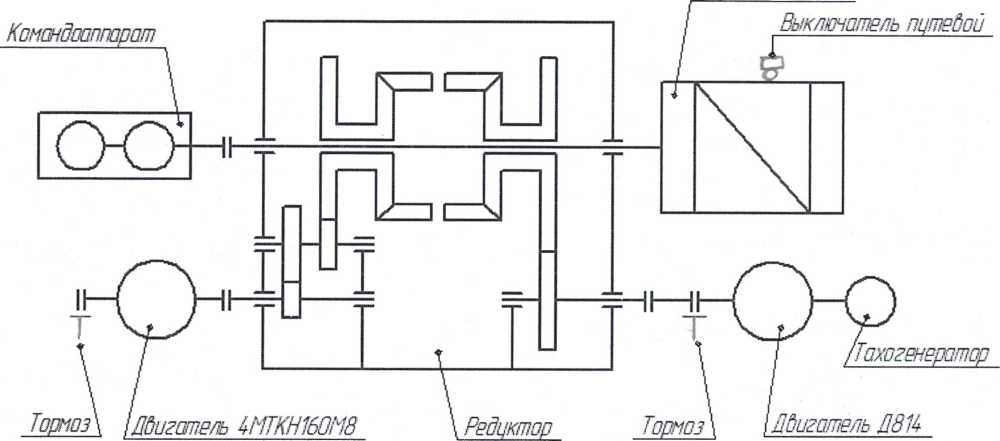
Рисунок 1.3 - Кинематическая схема механизма подъёма измерительной фурмы
1.3.2 Насосная станция гидросистемы
Насосная станция предназначена для снабжения гидроцилиндров исполнительных механизмов рабочей жидкостью.
Приводы рабочего и резервного насосов BG12-28M состоят из асинхронных двигателей с короткозамкнутым ротором 4A100 SA4. Насос работает непрерывно на протяжении всего процесса плавления. Непрерывная прокачка масла через гидравлическую систему снабжает охлаждающие цилиндры. В промежутке насос выключается. Технические данные двигателя приведены в таблице 1.
Таблица 1 - Технические данные двигателя 4А100 SA4
-
Количество на механизм
шт
2
Напряжение
В
380
Мощность
кВт
3
Ток
А
6,7
Скорость вращения номинальная
Об/мин
1435
Режим работы
%ПВ
100
2 Технические характеристики машины замера параметров плавки
2.1 Характеристика электроприводов машины замера параметров плавки
2.1.1 Привод перемещения измерительной фурмы
Питание двигателя для измерения движения сопла обеспечивается тиристорным электроприводом KTE320 / 440-131-23UHL4 с естественным воздушным охлаждением, 320 A, 400 В пост. Тока, одиночный двигатель, без линейного контактора, реверсивный, с инверсией тока цепи якоря, дроссель Версии, напряжение питания -380 В, 50 Гц, управление с помощью регулятора скорости и ступенчатой настройки скорости [2]. В дополнение к полному электроприводу копья, отдел разработал щит с релейным контактором. Панель управления содержит устройства для управления линейным контактором, контактором динамического тормоза, электрогидравлическим тормозом, источником питания обмотки возбуждения электродвигателя и фотоэлектрического концевого выключателя, а также задание скорости движения.
Электрическое движение измерительного зонда имеет четыре режима работы
- автоматически с контрольного компьютера
- автоматически из локальной зондирующей микропроцессорной системы
- Полуавтоматический пульт дистанционного управления
- вручную на месте.
В автоматическом режиме аналоговый командный сигнал заданного значения скорости выводится с управляющего положения копья МПС «Зонд» на вход контроллера скорости блока управления комплектного электропривода.
В полуавтоматическом режиме дистанционного управления движение форсунки контролируется оператором главного пульта управления преобразователя высокого давления. Консоль графического процессора имеет 5 кнопок управления для:
Опускание форсунки для зарядки датчика;
Опускание сопла для измерения параметров плавления;
- Поднимите форсунку в положение, где датчик должен быть удален.
- поднимите форсунку в исходное положение;
- Останови диск.
Движение копья осуществляется в соответствии с диаграммой скорости, указанной в техническом описании. Переключение скорости движения и остановка в заданных положениях производится в соответствии с командами концевого выключателя.
Для наладочных и ремонтных работ предусмотрена ручная работа. В этом случае все необходимые настройки скорости:
- «ниже» 0,12 м / с, 1,5 м / с, 3,6 м / с, 0,6 м / с;
- «до» 3,6 м / с, 0,6 м / с, 0,12 м / с.
Они определяются двумя ключами из флажка на механизме.
Система управления регулировочным приводом выполнена в виде двух цепей: внутренней цепи контроля тока якоря и внешней цепи управления скоростью двигателя.
При нормальной работе в приводе измерительной насадки предусмотрено рекуперативное торможение. В случае аварийного отключения линейного контактора во время движения копья активируется динамическое торможение.
Особенностью Lanzenbewegungsantriebs является то, что статический крутящий момент, приложенный к валу двигателя, активен. В этом случае привод можно отключить только после того, как был установлен «ток удержания» сопла. Когда одно из реле скорости движения активировано или контакт реле управления тормозом от микропроцессорной системы датчиков замкнут, на вход блока управления интенсивностью блока управления подается сигнал, который обеспечивает ток якоря двигателя приблизительно 0,5А. После включения реле управления током якоря тормозной контактор активируется, и на вход регулятора интенсивности подается сигнал задания скорости. Тормоз срабатывает после выключения двигателя без сигнала заданного значения скорости. В аварийном режиме тормоз срабатывает одновременно с динамическим торможением.
Система КИПиА, разработанная Металлургавтоматикой УТРПКИ, Днепропетровск, контролирует технологические параметры охлаждающей воды и инертного газа. Результирующий контактный сигнал от опускания копья в преобразователе выводится из схемы системы управления в схему привода. Если указанный контакт размыкается или срабатывает концевой выключатель, который ограничивает самое нижнее положение форсунки, обеспечивается автоматическое аварийное удаление форсунки из преобразователя.
Положение измерительного сопла на главном посту управления отображается с помощью цифрового дисплея, который является частью микропроцессорной системы «выборки». На коробке локального управления приводом предусмотрены сигнальные лампы контроля обеспечения форсунки. Технические данные механизма подъёма фурмы приведены в таблице 2.
Таблица 2 - Технические данные механизма подъёма измерительной фурмы
Параметр и обозначение |
Единицы измерения |
Значение |
Подъёмный вес фурмы-Gф, |
кН |
34 |
Скорость передвижения рабочая- Vp, |
м/с |
3,6 |
Скорость передвижения установочная, Vy |
м/с |
0,12 |
Предельно допустимое ускорение (замедление), а (b) |
м/с2 |
1,3 |
Передаточное число редуктора, i |
- |
4,3 |
Коэффициент полезного действия: |
|
|
- редуктора, ɳр |
- |
0,96 |
- барабана, ɳбар |
- |
0,84 |
Диаметр барабана, dк |
м |
0,6 |
Суммарный момент инерции механизма, приведённый к валу двигателя, JMex |
кг-м2 |
115 |
Продолжительность работы за плавку, tp |
c |
46 |
Рабочий цикл одной плавки, tu |
мин |
45 |
Цикл включает: |
|
|
- опускание вниз S1 |
м |
24,8 |
- подъём фурмы вверх, S3 |
м |
24,8 |
2.1.2 Аварийный привод перемещения измерительной фурмы
Аварийное срабатывание движения имеет два режима работы:
- автоматическая, зондовая микропроцессорная система;
- дистанционное и локальное руководство.
В автоматическом режиме контактный сигнал от системы Sonda выдает аварийный выход с земли преобразователя, когда главный инвертор отключен и датчик скорости выходит из строя.
В ручном режиме главная станция управления и коробка, расположенная рядом с механизмом, снабжены клавишами для управления движением туй аварийным устройством.
2.1.3 Приводы насосов гидросистемы
Управление рабочим и резервным насосами гидросистемы осуществляется кнопками главной станции управления преобразователем и тремя коробками, расположенными в механизмах. Кроме того, в каждом из ящиков предусмотрен избиратель для контроля местоположения, который при повороте в положение «Вкл.» Управляет насосами этой рабочей станции, если аналогичные клавиши в двух других полях находятся в положении «Выкл.» ,
2.2 Требования, предъявляемые к электроприводу мехатронной системы измерительной фурмы
К электроприводу механической мехатронной измерительной системы предъявляются следующие основные требования:
- высокая надежность и бесперебойная работа механизма в условиях высокой температуры (до + 40 ° С) и низкой (до -30 ° С) и высокой запыленности;
- обеспечить работу механизма в условиях повышенной вибрации (1-35 Гц);
- обеспечить работу механизма подъема стрелы на двух скоростях: работа 3.6
м / с и низкая 00,12 м / с;
- просадка статического тока не должна превышать 5%;
- большая перегрузка по току и импульс привода (λ1 = 2,5);
- допустимое относительное увеличение тока якоря ограничено до 200 · В / с;
- допустимый динамический ток не должен превышать 1,5 · В;
- снижение статической скорости не должно превышать 5%;
- обеспечить заданные значения предельного ускорения и замедления (1,2 м / с2);
- точность остановки пучка в зоне позиционирования не более 0,1 м;
- прерывистая работа привода;
- обратный режим работы;
- подключение высокочастотного преобразователя в час (до 10000);
- Должны быть предусмотрены механические и электрические ограничители максимальных перемещений фурмы;
- в случае отказа электродвигателя необходимо предусмотреть ручной режим для подъема фурмы.
3 Выбор и проверка двигателя
3.1 Расчёт статических моментов
Необходимо рассчитать статический момент, приведённый к валу двигателя для наиболее сложного режима работы электропривода. Таким режимом является подъём фурмы.
Статический
момент при подъёме фурмы
 рассчитывается по формуле (3.1):
рассчитывается по формуле (3.1):
Мпод
= ;
(3.1)
;
(3.1)
Мпод

Угловая скорость вращения двигателя при работе на рабочей скорости находится по формуле (3.2):
 ;
; (3.2)
;
; (3.2)
 c-1.
c-1.
Скорость вращения двигателя при работе на рабочей скорости находится по формуле (3.3):
 ;
(3.3)
;
(3.3)