Запишем уравнение (В.12) через напряжения обратных связей, тогда получится следующее уравнение:
|
(u |
он |
(p) − u |
оэ |
(p) − u |
от |
(p)R |
kон ) |
1 |
- |
|
T p |
|
|
|
|
|
|
|
a k |
от |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
(В.13) |
|
|
|
|
|
|
kон |
|
|
|
|
|
|
|
|
- u |
от |
(p)R |
a |
= ∆u |
т |
= 0 |
|
|
|
|
|
|
|
|
kот |
|
|
|
|
|
|
|
Первое слагаемой в выражении (В.13) моделирует якорную цепь в структурной схеме электродвигателя постоянного тока, и определяет сигнал, пропорциональный якорному току, который сравнивается с сигналом фактического значения якорного тока. Если выходной сигнал
датчика ЭДС uоэ пропорционален ЭДС электродвигателя, то уравнение (В.13) будет справедливым. Фактически в процессе работы датчика ЭДС равенство (В.13) нарушается, и по величине ошибки ∆uт определяется
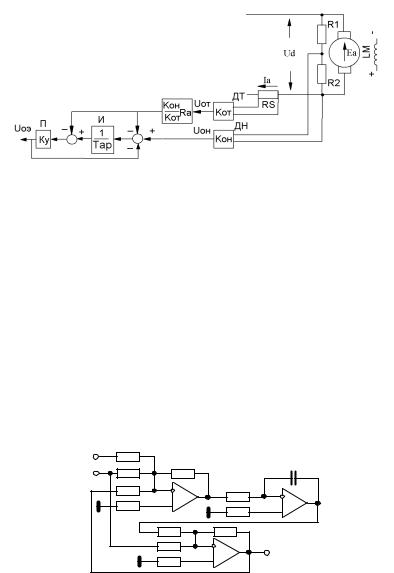
выходной сигнал датчика ЭДС. Структурная схема датчика ЭДС на базе наблюдающего устройства представлена на рис. В.5.
Датчик включает в себя интегратор И, пропорциональное звено с коэффициентом передачи kу , усиливающее ошибку ∆uт до величины
uоэ .
В соответствии с рис.А5 можно записать следующее выражение:
|
((u |
он |
− u |
оэ |
− u |
от |
R |
kон ) |
1 |
- u |
|
R |
k |
он )k |
|
= u |
|
. (В.14) |
|
T p |
от |
a k |
у |
оэ |
|
|
|
|
|
a k |
от |
|
|
от |
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
В соответствии с (В.14) передаточная функция датчика ЭДС на базе наблюдающего устройства имеет вид:



 R
R

 -Uом
-Uом