ПРИЛОЖЕНИЕ В Реализация аналоговых датчиков обратных связей в СУЭП
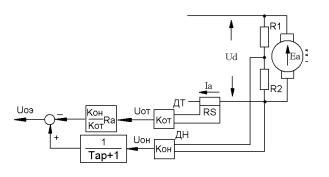
Датчик ЭДС. Непосредственное измерение величины ЭДС электродвигателя не представляется возможным, поэтому сигнал, пропорциональный ЭДС, выделяют косвенным путем на основании известного математического выражения через координаты, непосредственное измерение которых в электроприводе не вызывает никаких затруднений.
Уравнение равновесия для якорной цепи электродвигателя, записанное в операторной форме, определяется выражением:
Ua (p) = Ea (p) + Ia (p)Ra (Ta p +1) , |
(В.1) |
где Ra - активное сопротивление якорной цепи электродвигателя, Ом;
Тa = La Ra - электромагнитная постоянная времени якорной цепи электродвигателя, с.
Как видно из выражения (В.1) дл я выделения ЭДС электродвигателя, необходимо иметь информацию о величинах напряжения и тока электродвигателя, которые в системе управления
|
представлены напряжениями обратных связей по |
напряжению |
|
uон = kонUa и току |
uот = kотIa , где kон ,kот - коэффициенты обратных |
|
связей по напряжению и току, соответственно. |
|
|
|
|
|
|
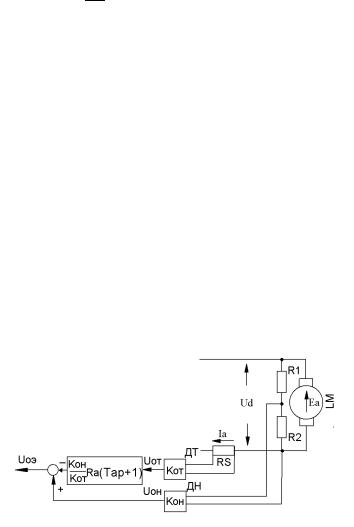
Выразим выражение (В.1) через напряжения обратных связей |
|
относительно ЭДС электродвигателя: |
|
|
|
|
|
|
|
E |
a |
(p) = uон (p) |
− uот (p) R |
a |
(T p +1) . |
(В.2) |
|
|
|
|
kон |
kот |
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
Преобразуем (В.2) к виду: |
|
|
|
|
|
|
|
|
kонEa (p) = kоэEa (p) |
= uоэ |
(p) = |
uон (p) |
|
|
− uот (p) kонRa , (В.3) |
|
Tap +1 |
|
Ta p +1 |
Ta p +1 |
|
|
kот |
|