Eвыхm = |
3 |
kт Uвm |
Cos(θ1 −θ2 ) . |
|
2 kI |
2Z |
(В.37) |
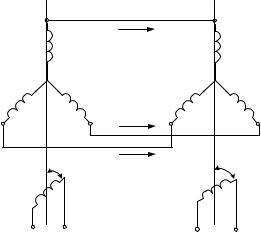
Как видно из (В.37) амплитуда выходной ЭДС зависит от разности |
углов поворота роторов |
сельсинов θ1 −θ2 = ∆θ, |
т.е. от |
рассогласованного положения роторов сельсинов, и при рассогласовании
∆θ = 0 получается максимальное значение амплитуды выходной ЭДС,
что не соответствует характеристике управления датчика, когда нулевому значению входного сигнала ставится в соответствие нулевое значение выходного сигнала. Если за согласованное состояние СД и СП принять взаимно перпендикулярное положение осей роторных обмоток, то в этом
случае в новой системе отсчета |
|
θ1 −θ2 + π/ 2 характеристика |
управления датчика рассогласования |
Eвыхm = f (∆θ) примет вид: |
|
3 |
kт Uвm |
Sin(θ1 |
−θ2 ) = kдрSin(∆θ) |
|
Eвыхm = 2 kI |
2Z |
(В.38) |
|
|
|
|
, |
где kдр - коэффициент передачи датчика рассогласования, В/град(рад);
∆θ = θ1 −θ2 - рассогласование углов поворота роторов сельсинов, град (рад).
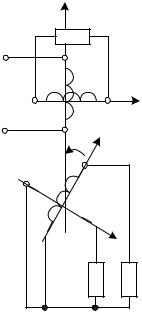
Для получения напряжения постоянного тока, используемого в качестве сигнала в СУЭП, роторная обмотка СП подключается к ФВУ, на выходе которого будет сформировано напряжение постоянного тока,
величина которого будет определяться амплитудой Eвыхm , а полярность
– фазой ϕвыходной ЭДС, т.е. знаком угла рассогласования (фаза ϕ = 0 при ∆θ > 0 и ϕ = π при ∆θ < 0 ).
Если ротор СД использовать как устройство задания угла поворота, а ротор СП сочленить через измерительный редуктор с валом исполнительного электродвигателя, то при равенстве углов положения роторов СД и СП амплитуда выходной ЭДС будет равна нулю и будет равно нулю выходное напряжение ФВУ, что соответствует исходному положению. Если ротор сельсина СД повернуть на какой-то угол
θСД = θ1 , появится отличное от нуля рассогласование ∆θ ≠ 0 и отличная от нуля амплитуда выходной ЭДС и, следовательно, отличное
 р
р р
р
