|
|
|
R3 |
|
R3 ) |
R6 |
R5 |
|
|
R6 |
|
− U |
|
= (−u |
− u |
|
|
|
+ u |
, |
|
R C p +1 |
|
ом |
|
ос R |
1 |
|
от R |
2 |
|
ос R |
4 |
|
|
|
|
|
|
|
3 |
1 |
|
|
|
|
из последнего уравнения можно получить расчетные соотношения для определения параметров датчика момента:
R3 |
= R3 |
=1; R6 |
= R6 |
=1;R C = T . |
R1 |
R2 |
R5 |
R4 |
3 1 д |
|
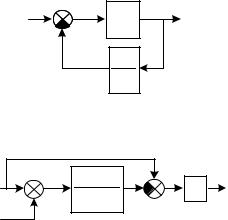
Реализация датчика момента нагрузки также возможна на базе наблюдающего устройства, для чего исходное уравнение (В.20) необходимо записать в интегральном виде:
|
uот (p) − uом (p) |
− uос (p) = ∆uс = 0 . |
(В.25) |
|
Tдp |
|
|
|
Первое слагаемое в уравнении (В.25) моделирует электромеханический преобразователь в структурной схеме электродвигателя постоянного тока независимого возбуждения. Входными сигналами являются напряжение сигнала по току (моменту)
uот и выходной сигнал датчика момента uом . Первое слагаемое
определяет сигнал, пропорциональный частоте (скорости) вращения электродвигателя, который сравнивается с фактическим значением
частоты (скорости) вращения электродвигателя uос . Если выходной
сигнал датчика момента uом пропорционален моменту нагрузки на валу
электродвигателя, то уравнение (В.25) будет справедливым. Фактически в процессе работы электропривода равенство (В.25) нарушается, и по
величине ошибки ∆uс определяется выходной сигнал датчика момента.
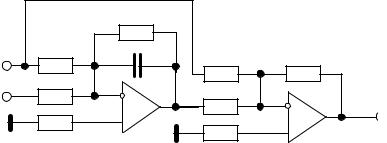
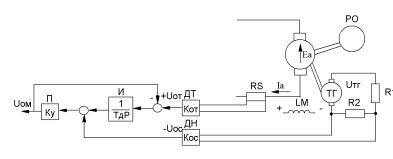
Структурная схема датчика момента нагрузки на базе наблюдающего устройства показана на рис.В.10 и включает в себя
интегратор И с постоянной времени |
интегрирования Тд , |
пропорциональное звено П с коэффициентом передачи kу , усиливающее сигнал ошибки ∆uс до величины uом , и описывается уравнением: