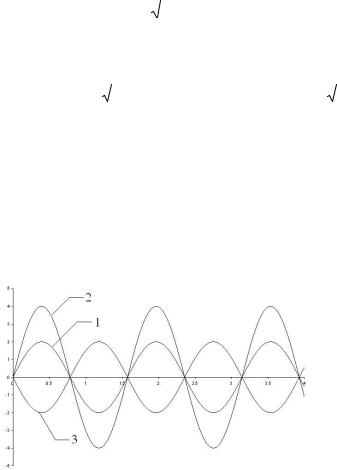
углом поворота ротора сельсина. Таким образом, в исходном положении механизма ротор сельсина-датчика находится в исходном положении,
когда θ = 0 и Eлm = 0 , при максимальном перемещении механизма в одном направлении, ротор сельсина повернется на максимальный угол θ = θmax при котором Eлm = max ; при максимальном перемещении механизма в противоположном от исходного направлении, ротор сельсина повернется на угол θ = −θmax , при котором Eлm = −max .
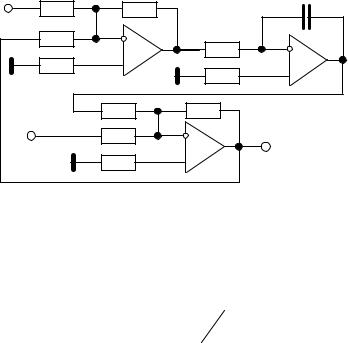
Для получения напряжения постоянного тока, пропорционального углу поворота ротора сельсина (перемещению механизма), применяют фазовыпрямляющее устройство (ФВУ), величина выходного напряжения
которого Uоп зависит от амплитуды переменного входного напряжения,
а полярность выходного напряжения определяется фазой входного напряжения (рис.В.14).
Таким образом, по величине напряжения Uоп с выхода ФВУ можно судить о величине линейного перемещения механизма, а по полярности Uоп – о направлении перемещения от исходного положения.
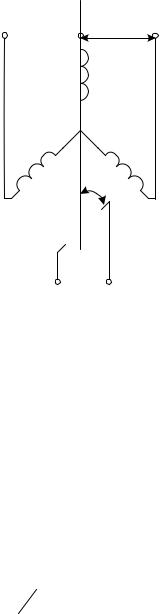
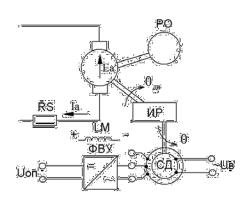
Рис.В.14. Схема включения сельсинадатчика
Выходное напряжение ФВУ Uоп может применяться в качестве
напряжения обратной связи по положению механизма в позиционной СУЭП.
В режиме фазовращателя трехфазная обмотка статора получает питание от источника трехфазного напряжения с неизменной амплитудой