Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
а)
б)
Рис.8.9. Отработка средних перемещений на холостом ходу (а) и под нагрузкой (б)
Из переходных процессов рис.8.10 видно, что отработка малых перемещений происходит в условиях, когда ни ток, ни скорость, не достигают установившегося значения. Отработка осуществляется при
301
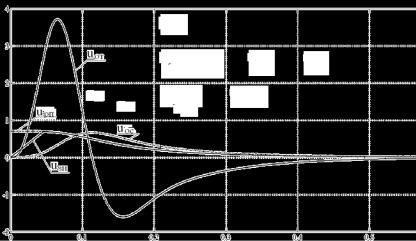
ускорении меньше заданного. Задатчик интенсивности работает в режиме слежения.
Как видно из переходных процессов рис.8.8…8.10 спроектированная система управления позиционным электроприводом обеспечивает отработку средних и больших перемещений с заданным ускорением при отсутствии перерегулирования при работе под нагрузкой.
Рис.8.10. Работа позиционной СУЭП при отработке малых перемещений
Реализация нелинейного РП на операционном усилителе выполняется так же, как и реализация функционального преобразователя, рассмотренная в примере 19 главы 7. Характеристика нелинейного РП (рис.8.6) заменяется отрезками прямых линий, т.е. выполняется кусочно - линейная аппроксимация характеристики РП (см. рис.8.11).
302
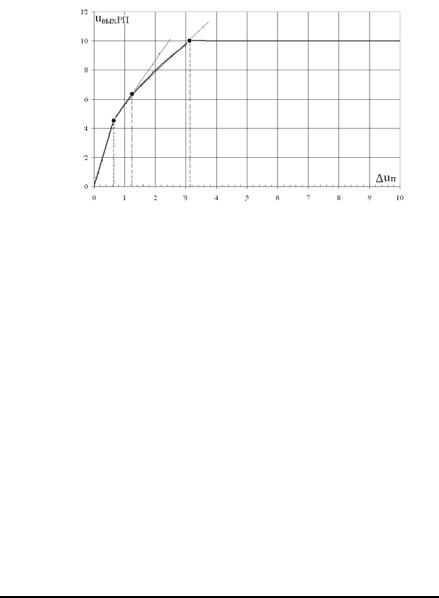
Рис.8.11. Кусочно – линейная аппроксимация
характеристики РП |
|
Характеристика РП имеет четыре |
участка, для которых |
определяются коэффициенты передачи. В соответствии с рассчитанными коэффициентами вычисляют параметры операционного усилителя, как это было рассмотрено в примере 19. Отличием реализации регулятора положения от реализации функционального преобразователя, рассмотренного в примере 19, является то, что характеристика РП должна быть реализована в первом и третьем квадрантах, для чего добавляется схема с добавочными резисторами и диодами с противоположным подключением к источнику питания –Uип2. В схеме РП также не должно быть конденсатора в цепи обратной связи операционного усилителя, моделирующего постоянную времени контура вихревых токов в функциональном преобразователе.
Регулятор положения ПИ структуры применяют для снижения динамической ошибки на входе РП, когда входное напряжение задания
uзп изменяется во времени и позиционная система работает в линейном режиме, отслеживая изменение uзп с минимально допустимой ошибкой.
Применяются и другие настройки РП, подробно рассмотренные в
[7,11,12].
Контрольные вопросы:
1. Почему при нагрузке электропривода возникает ошибка при отработке заданного перемещения?
303
2.Поясните основные режимы работы, возникающие при отработке заданных перемещений
3.Как определить величину ошибки при отработке заданного перемещения?
4.Зачем в характеристике регулятора положения выполняют зону нечувствительности?
5.Как рассчитать величину зоны нечувствительности характеристики регулятора положения?
6.Поясните переходные процессы на рис.8.8 (при ответе используйте характеристику регулятора положения).
7.Как устранить ошибку при отработке заданного перемещения?
8.Поясните переходные процессы на рис.8.9 (при ответе используйте характеристику регулятора положения).
9.С какой целью применяют ПИ регулятор положения?
10.Как реализовать нелинейный регулятор положения на операционном усилителе?
304
ПРИЛОЖЕНИЕ А
Таблица А1
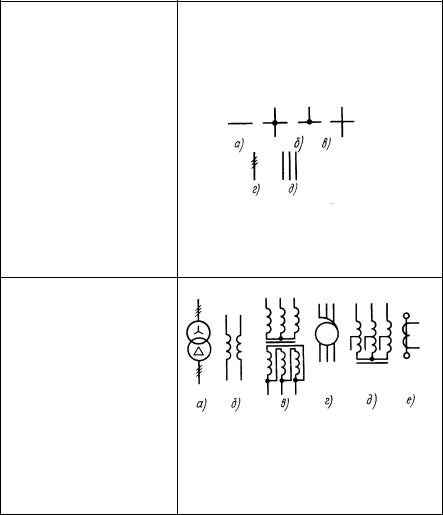
Условные графические обозначения основных электротехнических элементов
Электротехнический |
Условное графическое обозначение |
элемент |
|
|
|
1 |
2 |
|
|
Линии |
|
электрической связи (а), их |
|
соединение (б), пересечене |
|
(в),в однолинейном (г) и |
|
многолинейном |
|
(д)изображении |
|
Обозначение
трансформатора напряжения (а), однофазного (б) и трехфазного (в) трансформаторов при развернутом способе; автотрансформатора (г,д) и трансформатора тока (е)
305