Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
kрп , uвыхРП
2 |
uвыхРП = uзс |
b |
uзс = kос ωн |
||
kрпм ∆uп |
|
c |
|||
|
|
|
|||
|
|
|
|
||
d 1
kрпм
|
a |
kрп |
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
∆uпa |
∆uпb |
∆uп = uзп |
||
|
|
|
|
||
Рис.8.4. Зависимости коэффициента передачи и выходного напряжения РП от позиционного рассогласования
Из рис.8.4 видно, что при ∆uп стремящемся к нулю (отработка
заданного перемещения), коэффициент передачи регулятора положения стремится к бесконечности. Однако, при отработке малых перемещений, коэффициент передачи РП для обеспечения отсутствия перерегулирования и устойчивой работы системы регулирования должен
быть ограничен величиной kрпм (т. d на рис.8.4). Следовательно, в диапазоне значений 0 < ∆uп ≤ uпa коэффициент передачи РП должен быть равен kрп = kрпм = const. Известно, что выходное напряжение РП
не должно превышать задания номинальной скорости вращения электродвигателя, поэтому его следует ограничить на уровне
uвыхmaxРП = kocωн при позиционном рассогласовании ∆uп ≥ uпb (т.b на рис.8.4). Таким образом, для того чтобы система регулирования отрабатывала малые, средние и большие перемещения за минимальное время с оптимальными переходными процессами параболическая характеристика РП должна быть скорректирована в зоне малых и больших перемещений.
291
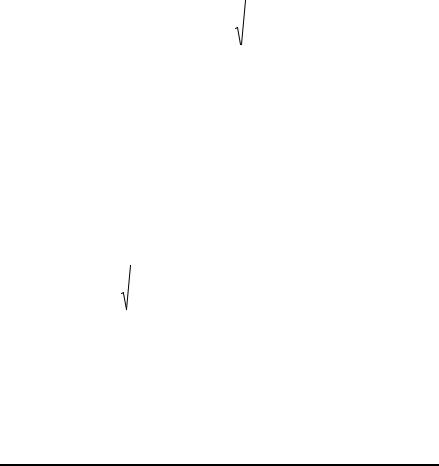
В зоне малых перемещений ( 0 < ∆uп ≤ uпa ) характеристика РП должна быть прямолинейной с коэффициентом передачи kрпм
uвыхРП = kрпм∆uп (прямая 2 на рис.8.4) , в зоне средних перемещений ( uпa ≤ ∆uп ≤ uпb ) характеристика РП должна быть параболической
(кривая 1 на рис.8.4), в зоне больших перемещений ( ∆uп ≥ uпb )
характеристика РП должна быть ограничена на уровне задания номинальной скорости вращения (прямая bc на рис.8.4).
Из равенства kрпм∆uпa = kос |
|
2εдоп∆uпa |
|
можно определить |
kмkоп |
|
|||
|
|
|
|
величину позиционного рассогласования ∆uпa , определяющую границу отработки малых перемещений:
|
|
|
k |
|
2 |
2ε |
|
|
|
2ε |
доп |
k |
м |
k |
оп |
|
|
|||
∆u |
|
= |
|
|
ос |
|
|
|
|
доп |
= |
|
|
|
, |
(8.12) |
||||
|
пa |
k |
|
|
|
k |
м |
k |
оп |
|
|
ω |
|
|
|
|
|
|||
|
|
|
|
рпм |
|
|
|
|
|
|
сп |
|
|
|
|
|||||
где ωсп - частота среза контура регулирования перемещения.
Величина |
позиционного |
|
рассогласования ∆uпb , |
определяющая |
|||||||||
границу отработки больших перемещений, определяется из равенства |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
ос |
ω = k |
ос |
2εдоп∆uпb |
|
, откуда |
|
|
|
|
|
||
|
|
|
|
|
|
||||||||
|
н |
kмkоп |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆uпb = |
ω2k |
м |
k |
оп |
|
|
||
|
|
|
|
|
н |
|
. |
(8.13) |
|||||
|
|
|
|
|
2εдоп |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||
Характеристика нелинейного РП строится в первом и третьем квадрантах для обеспечения отработки заданных перемещений в противоположных направлениях.
Контрольные вопросы:
1. Какой электропривод называют позиционным?
292
2.Как выполняют обратную связь по положению рабочего органа механизма?
3.В чем отличие системы регулирования перемещения от системы регулирования положения?
4.Поясните структурную схему позиционного электропривода.
5.Как рассчитать коэффициент обратной связи по положению (перемещению)?
6.Как рассчитать передаточное отношение измерительного редуктора?
7.Какие основные требования предъявляют к позиционным
СУЭП?
8.Назовите основные режимы позиционной системы регулирования.
9.Как настраивается регулятор положения при отработке малых перемещений?
10.Как правильно рассчитать коэффициент передачи регулятора положения при отработке больших перемещений?
11.Как отразится на работе СУЭП отклонение коэффициента регулятора положения от рассчитанного по (8.8)?
12.Как настроить регулятор положения при отработке средних перемещений?
13.Почему регулятор положения выполняют нелинейным?
14.Как правильно рассчитать характеристику нелинейного регулятора положения?
15.Как должно изменяться выходное напряжение регулятора положения в зависимости от рассогласования?
8.3 Влияние нагрузки на работу позиционной системы
Физическая природа возникновения ошибки, вызванной действием статического момента на валу электродвигателя, обусловлена тем, что при нагрузке электродвигателя и установившемся режиме работы, например, при скорости, равной нулю, для обеспечения вращения электропривода необходимо к якорю электродвигателя приложить напряжение, равное падению напряжения в якорной цепи, вызванное током, необходимым для преодоления момента нагрузки. Таким образом, ТП должен увеличить свою ЭДС, т.е. должен увеличиться сигнал ошибки между заданным и действительным положением рабочего органа механизма. После окончания процесса отработки заданного положения рабочий орган механизма не попадает в требуемую точку, т.к.
293
электродвигатель остановится не при нулевом значении ЭДС преобразователя, а при его значении, равном Ed = IcRэ , когда момент
электродвигателя и момент сопротивления на валу электродвигателя уравновесят друг друга. Следовательно, появляется ошибка при отработке заданного положения. Электродвигатель будет находиться в неподвижном состоянии, а по якорной цепи будет протекать ток, равный по величине статическому току.
Поскольку в установившемся режиме при остановке электродвигателя его скорость равна нулю, а по цепи якоря протекает ток, то в этом случае напряжение на выходе РП будет равно:
uвыхРП |
= ∆uпсkрпм = uзс = |
uзт |
= |
Ickот |
, |
(8.14) |
|
|
|||||
|
|
kрс |
kрс |
|
||
где ∆uпс - ошибка на |
входе РП, вызванная |
наличием |
момента |
|||
сопротивления на валу электродвигателя.
Ошибка при отработке заданного положения (перемещения) на входе РП, вызванная наличием момента нагрузки на валу электродвигателя, определяется зависимостью
∆uпс = ∆Sсkоп = ∆ϕсkоп , где ∆Sc (∆ϕс ) - расстояние (угол поворота), которое не «доехал» рабочий механизм из – за наличия момента сопротивления на валу электродвигателя.
Тогда из (8.14) можно получить зависимость ошибки регулирования ∆Sc (∆ϕс ) в зависимости от величины нагрузки на валу:
∆S (∆ϕ |
) = |
|
|
I |
k |
|
|
|
|
= I |
|
|
4TµRэkос |
|
|
k |
от |
= |
|||||||||||||
|
|
|
|
c |
|
от |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
с |
|
с |
|
|
k |
рс |
k |
рпм |
k |
оп |
c |
T |
сk |
от |
|
k |
оп |
k |
рпм |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
(8.15) |
|||||||||
|
R |
|
4Tµ |
|
|
k |
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
||||
= I |
э |
|
|
ос |
|
|
= ∆ω |
|
|
|
ос |
|
|
|
|
|
|
|
|
|
|||||||||||
|
c с |
|
T |
|
k |
оп |
k |
рпм |
|
|
|
с |
|
k |
оп |
k |
рпм |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Из (8.15) видно, что величина ошибки, вызванная наличием момента нагрузки на валу электродвигателя, определяется величиной
статической ошибки контура регулирования скорости ∆ωс . Поэтому,
294
чтобы исключить ошибку, вызванную действием статического момента, необходимо применить ПИ регулятор скорости, в этом случае ∆ωс = 0,
а, следовательно, и ∆Sc (∆ϕс ) = 0.
Кроме того, ошибка снижается с ростом коэффициента усиления РП kрпм , однако его значение не должно превышать величины, рассчитанной по (8.4) или (8.5).
Для электроприводов, отрабатывающих заданное перемещение под нагрузкой и имеющих ошибку при отработке заданного перемещения
∆Sc (∆ϕс ) , необходимо обеспечить зону нечувствительности в
характеристике РП для предотвращения протекания тока по неподвижному якорю после отработки заданного перемещения. В момент трогания электропривода величина напряжения с выхода РП должна
превысить начальное значение uРП0 , которое определяется величиной момента нагрузки, т.е. величиной статического тока:
uРП0 |
= |
uзт |
= |
Ickот |
, |
(8.16) |
kрс |
|
|||||
|
|
|
kрс |
|
||
при этом величина ошибки на входе РП будет равна:
|
∆uп0 |
= uРП0 = |
Ickот |
. |
|
|
(8.17) |
|
|
|
|
||||
|
|
kрпм |
kрсkрпм |
|
|
|
|
Начальный |
участок |
характеристики |
РП |
с |
зоной |
||
нечувствительности, показан на рис. 8.5.
295