Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
ГЛАВА 8. ПОЗИЦИОННАЯ СУЭП
Электропривод механизмов, рабочий орган которых для обеспечения нормального протекания технологического процесса должен либо на отдельных этапах, либо в каждый момент времени занимать в пространстве строго фиксированные положения, называется
позиционным.
Позиционные электроприводы выполняют различные функции в зависимости от особенностей технологии работы механизмов и могут быть разделены на следующие группы:
• электроприводы, предназначенные для отработки заданного положения механизма (в том числе для приведения механизма в исходное положение и фиксации в указанном положении);
•электроприводы, предназначенные для отработки заданного перемещения механизма;
•двухдвигательные электроприводы с взаимной синхронизацией электродвигателей по положению;
•следящие электроприводы с синхронизацией по положению с ведущим механизмом.
Для электропривода первой группы строго заданы начальное и конечное положение рабочего органа механизма и переход из одного положения в другое происходит по одному и тому же пути (например, механизм нажимного устройства клети прокатного стана).
Для электропривода второй группы начальной точкой отсчета для отработки заданного перемещения является конечное положение рабочего органа после отработки заданного перемещения, поэтому, например, поворот робота на угол π/2 по часовой стрелке может происходить бесконечное число раз.
Для электропривода третьей группы характерна отработка совместного синхронного движения с допустимой ошибкой (например, индивидуальный электропривод передвижения моста крана, обеспечивающий движение моста без перекоса).
Для следящего электропривода характерной особенностью является обеспечение перемещения рабочего органа в соответствии с изменяющимся по произвольному закону управляющим воздействием при ошибке, не превышающей допустимого значения во всех режимах работы (например, электропривод радиолокационной антенны, отслеживаемой положение летательного аппарата).
281
|
|
Для получения сигнала обратной связи по положению, можно |
||||||||||||||
использовать сельсин - датчик, работающий в амплитудном режиме и |
||||||||||||||||
связанный через измерительный редуктор с валом исполнительного |
||||||||||||||||
электродвигателя (приложение В). |
|
|
|
|
|
|
|
|||||||||
|
|
В системах регулирования перемещения с валом электродвигателя |
||||||||||||||
через |
|
измерительный |
редуктор |
связан |
сельсин |
– |
датчик, |
обмотка |
||||||||
синхронизации которого соединена с обмоткой синхронизации сельсина |
||||||||||||||||
– приемника по трансформаторной схеме подключения (приложение В). |
||||||||||||||||
На выходе сельсина – приемника формируется выходное напряжение |
||||||||||||||||
переменного тока, амплитуда которого пропорциональна синусу угла |
||||||||||||||||
рассогласования роторов сельсинов, а фаза – определяется знаком угла |
||||||||||||||||
рассогласования. Выход сельсина – приемника |
подключен к ФВУ, на |
|||||||||||||||
выходе ФВУ получается напряжение постоянного тока ∆uп , |
величина |
|||||||||||||||
которого пропорциональна разности углов поворота роторов сельсинов, а |
||||||||||||||||
полярность определяется знаком угла рассогласования. |
|
|
||||||||||||||
|
|
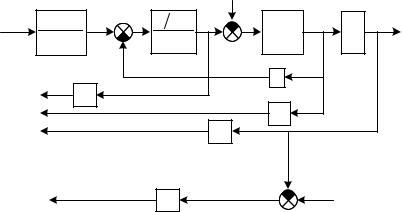
Структурная схема объекта регулирования позиционного |
||||||||||||||
электропривода представлена на рис.8.1. |
|
|
|
|
|
|
||||||||||
U |
|
ТП |
|
E |
|
|
|
|
Ia |
Ic |
|
|
|
|
ϕ(S) |
|
|
kп |
|
|
|
|
|
Rэ / с |
|
||||||||
|
|
|
|
|
|
|
|
|||||||||
|
у |
|
|
d |
|
|
1 Rэ |
|
|
ω kм |
||||||
|
|
Тµр +1 |
|
|
|
|
Тэр +1 |
|
|
|
Тмр |
р |
||||
|
|
|
|
|
|
|
Ea |
|
|
|
|
|
|
ω |
|
|
|
|
ДТ, |
Ш |
|
|
|
|
|
|
с |
W |
(p) |
||||
|
|
uот |
k |
|
|
Ia |
|
i =1 |
|
|
|
|
|
|
|
|
|
|
uос |
от |
|
|
|
i = 2 |
|
ТГ, Дел. |
|
kос |
ω |
|
|
||
|
|
|
|
|
|
|
|
|
i = 3 |
|||||||
|
|
uоп |
|
|
|
|
|
СД, ФВУ |
kоп |
ϕ |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СД, |
СП, |
ФВУ |
а) |
|
|
|
ϕ |
|
|
|
|
∆uп |
|
|
|
|
|
|
|
|
ϕз |
|
||||
|
|
|
|
|
|
|
kоп |
∆ϕ |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
Рис.8.1. Структурная схема объекта регулирования позиционного |
||||||||||||||
|
|
|
|
|
|
|
|
электропривода |
|
|
|
|
|
|||
|
|
На рис.8.1,а структурная схема соответствует электроприводу |
||||||||||||||
отработки заданного положения рабочего органа, а на рис.8.1,б - |
||||||||||||||||
электроприводу отработки заданного перемещения. |
|
|
|
|||||||||||||
282

Передаточная функция объекта регулирования для третьего контура регулирования (регулирования положения) имеет вид:
|
|
|
|
|
|
W |
(p) = |
kм |
, |
(8.1) |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
ор3 |
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
где k |
м |
= |
Vmax |
= |
Vmax |
- коэффициент, |
связывающий |
линейную |
||
|
|
ω |
|
ω |
|
|
|
|
|
|
|
|
|
max |
|
н |
|
|
|
|
|
скорость |
перемещения |
механизма и угловую скорость |
вращения |
|||||||
электродвигателя, если выходной координатой объекта регулирования является линейное перемещение (путь) механизма S , или
kм = ϕmax = 1 - коэффициент, связывающий угол поворота и
ωн iр
угловую скорость вращения электродвигателя, если выходной координатой объекта регулирования является угол поворота рабочего
органа механизма ϕ (где iр - передаточное отношение измерительного редуктора).
Для реализации обратной связи по положению (перемещению) рабочего органа применяют сельсин или вращающийся трансформатор, сочленяемый с валом электродвигателя через измерительный редуктор.
Ориентировочно передаточное отношение измерительного редуктора определяется выражением:
iр ≈ |
|
ω2maxkоп |
|
, |
(8.2) |
(0,5 |
−0,8)εu |
|
|||
|
зп max |
|
|||
где (0,5…0,8) – коэффициент запаса, учитывающий не идеальность элементов САР;
ωmax = ωн – максимальная скорость вращения электродвигателя при отработке заданного перемещения, 1/с;
uзпmax – максимальное задание на перемещение, В;
283
ε = dω/dt = Mдин/JΣ – |
угловое |
ускорение (замедление) |
электропривода, определяемое |
заданным |
динамическим моментом |
Мдин , т.е. работой задатчика интенсивности скорости (ЗИ).
Как видно из структурной схемы рис.8.1 система управления позиционным электроприводом должна содержать три контура регулирования: контур регулирования якорного тока, контур регулирования скорости и контур регулирования положения (перемещения).
Настройка контуров регулирования тока и скорости подробно рассмотрена в главе 2. Рассмотрим настройку внешнего контура регулирования положения (перемещения)[1,7,11].
8.1. Настройка контура регулирования положения
Настройка контура регулирования положения (перемещения) должна обеспечить выполнение следующих требований, предъявляемых
кпозиционным САР:
-обеспечение максимального быстродействия;
-обеспечение необходимой точности регулирования;
-отсутствие перерегулирования при отработке заданного перемещения.
При отработке заданного перемещения возможны три режима работы позиционной системы регулирования:
-отработка малых перемещений, когда система регулирования является линейной, т. е. ни одна из регулируемых координат не достигает установившегося значения; в этом режиме задатчик интенсивности на входе РС работает в режиме слежения;
-отработка средних перемещений, когда установившегося значения достигает якорный ток (момент), т.е. электропривод работает с заданным ускорением, формируемым задатчиком интенсивности, при этом скорость изменяется по треугольной тахограмме;
-отработка больших перемещений, когда установившегося значения достигают ток и скорость вращения электропривода (регулятор положения находится в ограничении), скорость изменяется по трапецеидальной тахограмме. В этом случае электропривод работает с максимальной установившейся скоростью вращения, которую в позиционном электроприводе принимают равной номинальной скорости
электродвигателя ωmax = ωн .
284
Рассмотрим особенности настройки регулятора положения (РП) при отработке малых, средних и больших перемещений.
8.1.1 Настройка регулятора положения при отработке малых перемещений
Структурная схема контура регулирования положения (перемещения) представлена на рис.8.2. В контур регулирования положения входят: регулятор положения (РП), передаточную функцию которого необходимо определить, задатчик интенсивности скорости (ЗИ), замкнутый контур регулирования скорости (ЗКС), объект регулирования и обратная связь по положению.
uзп |
|
|
∆uп |
РП |
uзс |
|
ЗИ |
uзи |
ЗКС |
ω |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
Wрп (p) |
|
|
|
1/ kос |
kм |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q3 (p) |
|
|
р |
|
|
|
|
uоп |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
i = 3 |
|
|
|||||
|
|
|
|
|
|
|
kоп |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис.8.2. Структурная схема контура регулирования положения
Если передаточную функцию регулятора положения (РП) выбрать в соответствии с настройкой на модульный оптимум, то в этом случае получается пропорциональный регулятор положения, передаточная функция которого определяется выражением:
W |
(p) = |
|
kос |
|
|
|
p |
= |
kос |
|
|
= k |
|
, |
(8.3) |
||
рп |
|
23 T pk |
оп |
|
k |
м |
|
8T k |
м |
k |
оп |
рп |
|
|
|||
|
|
|
µ |
|
|
|
|
µ |
|
|
|
|
|||||
где kоп = uопmax = uзп max |
- |
коэффициент |
обратной |
связи |
по |
||||||||||||
Smax |
Smax |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
положению (перемещению) при регулируемой координате линейного перемещения S , или
kоп = uопmax - коэффициент обратной связи по положению
ϕmax
(перемещению) при регулируемой координате ϕ.
285