Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked

При этом коэффициенте РП (8.3) частота среза контура положения будет в два раза меньше частоты среза контура регулирования скорости:
ωсп = ω2сс = 81Tµ . При такой настройке контура регулирования
положения обеспечивается оптимальный переходный процесс системы третьего порядка (см. таблицу 1), имеющий перерегулирование 6,2%, что является недопустимым для позиционных САР.
Чтобы устранить перерегулирование по положению, снижают быстродействие контура регулирования положения, и частота среза контура положения выбирается из условия:
ω = |
ωсс |
= |
1 |
. |
|
|
|||
сп |
3 ÷4 (12 ÷16)Tµ |
|
||
|
|
|||
В этом случае коэффициент передачи РП, обеспечивающий работу контура без перерегулирования при отработке малых перемещений,
обозначают kрпм и рассчитывают по формулам [7,11]: - если регулятор скорости пропорциональный:
kрпм = |
ωспkос = |
kос |
, |
(8.4) |
|
(12 ÷16)Tµkмkоп |
|||||
|
kмkоп |
|
|
- если регулятор скорости пропорционально - интегральный:
kрпм = |
|
kос |
. |
(8.5) |
|
(24 |
÷32)Tµkмkоп |
||||
|
|
|
|||
Отклонение от расчетного |
значения kрпм |
приводит или к |
|||
перерегулированию или к режиму «дотягивания», что увеличивает время отработки заданного перемещения. Коррекцию значения рассчитанного по (8.4) или (8.5) коэффициента регулятора положения проводят при моделировании САР в режиме малых перемещений, добиваясь работы без перерегулирования за минимально возможное время.
286
Пример 20. Для параметров СУЭП, рассмотренных в примерах |
||||||||
5…13 (kп = 25; Tμ |
= 0,01с; Rэ = 0,115Ом; Тэ = 0,05с; Тм = 0,08с; k |
от= |
||||||
0,0208 В/А; Трт = 0,09с; kрт |
= 0,556; ω |
н=59,1 с-1; с = 3,5 Вс ; k |
ос= 0,1587 |
|||||
Вс; kрс= 7,98; ε=94,5 с-2; ТЗИ |
=0,667с), |
рассчитать параметры регулятора |
||||||
положения в режиме малых перемещений для kоп= 10 В/рад. |
|
|
||||||
Рассчитаем величину передаточного отношения измерительного |
||||||||
редуктора в соответствии с (8.2): |
|
|
|
|
|
|||
iр |
|
= |
(ωн2kоп)/((0,5…0,8)εuзпmax) |
|
= |
|||
(59,12*10)/((0,5…0,8)*94,5*10)=74…50. Примем iр |
= 67, тогда |
|||||||
коэффициент РП по (8.4) будет равен kрпм= kос/((12…16)Тμkмkоп)= |
||||||||
8,8…6,6. Предварительно принимается kрпм= 7. |
|
|
|
|
||||
8.1.2 Настройка регулятора положения при отработке больших |
|
|||||||
|
|
|
перемещений |
|
|
|
|
|
При отработке больших перемещений электропривод работает по |
||||||||
трапецеидальной тахограмме, когда скорость электродвигателя достигает |
||||||||
установившегося значения. Для ограничения скорости вращения |
||||||||
электродвигателя выходное напряжение РП, являющееся заданием |
||||||||
скорости вращения электродвигателя, должно быть ограничено на уровне |
||||||||
задания |
максимальной |
(номинальной) |
скорости |
вращения |
||||
электродвигателя |
( uвыхРП |
= uзсmax = kocωн ). |
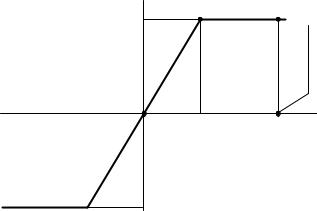
Характеристика |
РП |
||||
показана на рис.8.3. |
|
|
|
|
|
|
|
|
|
|
|
uвыхРП |
= uзс |
|
|
|
|
|
|
+uзсmax |
a |
|
зпmax |
|
|
|
|
|
|
|
|
|
= u |
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
∆u |
|
|
|
|
|
0 |
∆uпa |
∆uп = uзп −uоп |
|
||
|
|
|
−uзсmax |
|
|
|
|
|
|
Рис.8.3. Характеристика регулятора положения |
|
|
|||||
287

Входным напряжением РП является ошибка регулирования положения (перемещения), т.е. разность между напряжением задания положения (перемещения) и напряжением обратной связи по положению
(перемещению) ∆uп = uзп - uоп . Коэффициент передачи РП при
отработке больших перемещений определим из условия обеспечения остановки электропривода, вращающегося с номинальной скоростью, с
постоянным заданным ускорением (замедлением) εдоп .
Для т. a характеристики РП (рис.8.3) коэффициент передачи на линейном участке равен:
kрпб = uвыхРП |
= kосωн . |
(8.6) |
uвхРП |
∆uпa |
|
Ошибка на входе РП, соответствующая т. a характеристики РП, определяется перемещением рабочего органа за время торможения электропривода от номинальной скорости вращения до нуля:
|
|
|
∆uпa |
= uзп - uоп = kоп (Sзад −S) = kопSт , |
(8.7) |
||||||
|
at2 |
|
|
k |
м |
ε |
доп |
t2 |
|
||
где Sт = |
т |
= |
|
|
|
т |
- перемещение рабочего органа |
за время |
|||
|
|
|
2 |
|
|
||||||
|
2 |
|
|
|
|
|
|
|
|
||
торможения tт от номинальной скорости до нуля с заданным ускорением (замедлением) εдоп .
С учетом (8.7) и (8.6) коэффициент передачи РП определится:
kрпб = k∆осωн
uпa
= 2kос εдоп kмkоп ωн
|
k |
ω |
|
|
k |
|
|
ω |
|
2 |
|
|
|
2k |
|
|
ω ε2 |
|
|||||||||
= |
|
ос |
|
н |
= |
|
|
|
ос |
|
н |
|
|
|
= |
|
|
|
ос |
|
н |
доп |
= |
||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||||||
|
k |
оп |
S |
т |
|
k |
оп |
k |
м |
ε |
доп |
t |
т |
k |
оп |
k |
м |
ε |
|
ω |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
доп н |
(8.8) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
288

Если kрпб будет меньше рассчитанного по (8.8) значения, то
возникает режим «дотягивания», т.е. оставшийся отрезок пути система отрабатывает с меньшим, чем заданное ускорением (замедлением). При
увеличении коэффициента передачи kрпб больше рассчитанного по (8.8)
значения – возникает перерегулирование при отработке заданного перемещения.
8.1.3 Настройка регулятора положения при отработке средних перемещений
При отработке средних перемещений электропривод работает по треугольной тахограмме. При этом стремятся обеспечить одинаковое
ускорение и замедление электропривода, равное εдоп . Выбор момента
начала торможения и обеспечение заданного темпа торможения есть два взаимосвязанных условия. Их выполнение обеспечивает решение основной задачи позиционирования – остановку механизма в заданной позиции.
На основании (8.7) можно определить зависимость изменения скорости вращения электропривода от текущего позиционного рассогласования (ошибки отработки положения) при выполнении
условия εдоп = const, для чего выполним следующие преобразования:
∆u |
|
= k |
|
S |
|
= k |
|
kмεдопt2т |
= k |
|
kмεдопω2 |
= kопkмω2 |
, |
|
п |
оп |
т |
оп 2 |
оп 2εдоп2 |
||||||||||
|
|
|
|
|
2εдоп |
|
||||||||
откуда получается следующая нелинейная функциональная зависимость:
ω = |
|
2εдоп∆uп |
|
, |
(8.9) |
|
|||||
|
|
kмkоп |
|
||
где ∆uп = Sтkоп – ошибка (рассогласование) перемещения.
Практически это означает, что, обеспечивая средствами системы регулирования данную функциональную связь скорости движения с позиционным рассогласованием (8.9), можно реализовать требуемый равнозамедленный процесс, приводящий механизм в заданную позицию.
289
При этом коэффициент передачи регулятора положения при отработке средних перемещений будет определяться зависимостью:
|
|
= kосω = k |
|
|
|
|
|
k |
|
|
2εдоп |
. , |
(8.10) |
||
|
|
|
|||||
|
рпс |
∆uп |
ос kмkоп∆uп |
|
|||
а выходное напряжение РП должно изменяться по зависимости:
uвыхРП = kосω = kос |
|
2εдоп∆uп |
|
. |
(8.11) |
|
|||||
|
|
kмkоп |
|
||
Как видно из (8.10), коэффициент передачи РП при отработке средних перемещений должен изменяться в соответствии с изменением
позиционного рассогласования ∆uп .
8.2 Настройка нелинейного регулятора положения
Рассмотрим изменение коэффициента передачи РП и выходного напряжения РП в зависимости от изменения позиционного
рассогласования ∆uп . Как видно из (8.10) и (8.11) коэффициент передачи РП при изменении ∆uп должен изменяться по
гиперболической зависимости kрп = k
 1/ ∆uп , а выходное напряжение РП (напряжение задания скорости вращения электропривода) должно изменяться по параболической зависимости uвыхРП = uзс = k
1/ ∆uп , а выходное напряжение РП (напряжение задания скорости вращения электропривода) должно изменяться по параболической зависимости uвыхРП = uзс = k
 ∆uп . На рис.8.4. показаны зависимости kрп = f (∆uп ) и uвыхРП = f(∆uп ) .
∆uп . На рис.8.4. показаны зависимости kрп = f (∆uп ) и uвыхРП = f(∆uп ) .
290