Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
|
|
|
|
uвыхРП = uзс |
||
|
|
|
|
kрпм ∆uп |
||
−∆u |
|
uРП0 |
|
∆uп |
||
|
||||||
−∆u |
п0 |
|
||||
|
пa |
|
|
|
||
|
|
|
|
∆uп0 ∆uпa |
||
|
|
|
|
−uРП0 |
||
|
|
|
|
|||
|
|
|
|
|
|
|
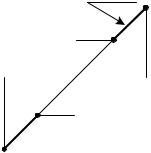
Рис.8.5. Характеристика РП с зоной нечувствительности
В диапазоне изменения позиционного рассогласования
− ∆uп0 ≤ ∆uпс ≤ ∆uп0
выходное напряжение РП остается равным нулю, что предотвращает работу неподвижного электродвигателя под током. Максимальная ошибка отработки заданного перемещения должна
удовлетворять следующему требованию: ∆Scmax ≤ 2∆uп0 .
kоп
В позиционных электроприводах, работающих с переменным моментом нагрузки, зона нечувствительности рассчитывается для максимального значения момента нагрузки.
Пример 21. Для параметров СУЭП, рассмотренных в примере 20 реализовать нелинейный регулятор положения. Выполнить моделирование работы позиционной СУЭП при отработке заданных перемещений.
Для построения характеристики РП определим точки сопряжения характеристики РП на основании уравнений (8.12) и
(8.13):
uпa=(kос/kрпм)2*2ε/(kм*kоп)=(0,1587/7)22*94,5/(0,015*10)=0,63
В;
uпb=(ωн2*kм*kоп)/2ε= (59,12*0,015*10)/2*94,5 = 3,2 В.
296
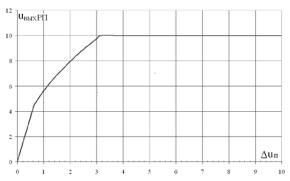
Параболическая характеристика РП определяется зависимостью (8.11):
uвыхРП=kос√(2ε/(kмkоп))√(Δuп)=0,1587√(2*94,5/(0,015*10))√(Δuп
)=
=5,63√(Δuп).
Результаты расчета нелинейной характеристики РП представлены в таблице 3, а сама характеристика РП приведена на рис.8.6.
Таблица 3. Нелинейная характеристика РП uвыхРП=f(Δuп)
uп, В |
|
,63 |
,8 |
,0 |
,2 |
,5 |
,0 |
,55 |
0 |
|
|
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
|
|
|
выхРП, В |
|
,48 |
,03 |
,63 |
,17 |
,89 |
,96 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
Рис.8.6. Нелинейная характеристика РП
Как видно из характеристики рис.8.6 она состоит из линейного участка, параболического и участка ограничения выходного напряжения, что позволяет отрабатывать все возможные перемещения.
Для моделирования позиционной СУЭП необходимо к модели однократной системы регулирования скорости добавить контур регулирования положения, в который входят регулятор положения с нелинейной характеристикой, рассчитанной ранее, объект регулирования и обратная связь по положению. Схема модели позиционной СУЭП представлена на рис. 8.7.
297
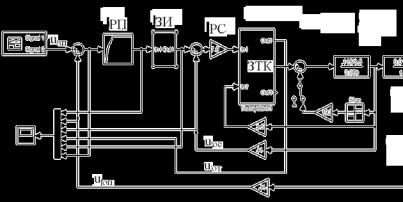
Рис.8.7. Модель позиционной СУЭП
Результаты моделирования работы позиционной СУЭП при отработке различных перемещений приведены на рис.8.8…8.10, на
которых показаны изменения во времени выходного напряжения РП uРП,
напряжение задания перемещения uзп; напряжение на выходе ЗИ uзи; |
||
напряжения обратной связи по положению uоп; скорости uос |
и току uот; и |
|
ошибка на входе РП |
uп. |
|
Рассмотрим |
работу позиционной СУЭП при |
отработке |
максимального перемещения uзпmax =10В на холостом ходу (рис.8.8,а) и
под нагрузкой (рис.8.8,б). В характеристике РП предусмотрена зона нечувствительности для предотвращения протекания тока по неподвижному электродвигателю.
В начале работы РП заходит в ограничение и на его выходе формируется максимальное задание скорости uзсmax , задатчик интенсивности формирует линейно изменяющееся напряжение с заданным темпом uзи , которое поступает на вход РС, обеспечивая разгон
электропривода с заданным динамическим током, т.е. с заданным ускорением.
298
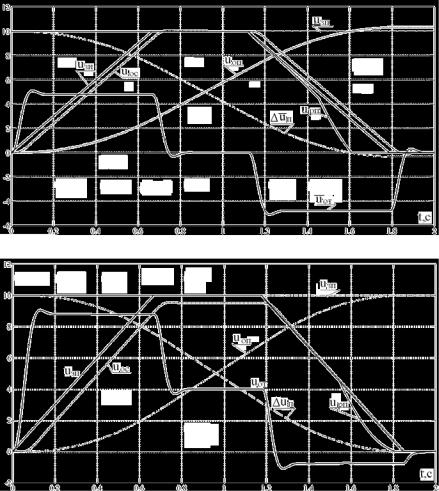
а)
б)
Рис.8.8. Отработка больших перемещений на холостом ходу (а) и под нагрузкой (б)
Электропривод работает на максимальной установившейся скорости до тех пор, пока РП не выходит из ограничения; после чего выходное напряжение РП начинает уменьшаться в соответствии с
299
зависимостью (8.11), что приводит к торможению электропривода с заданным ускорением.
На холостом ходу (рис.8.8,а) электродвигатель работает с максимальной скоростью вращения, а т.к. пройденный путь определяется интегралом от скорости вращения, т.е. площадью, заключенной между осью времени и скоростью (напряжением обратной связи по скорости), то отработка максимального перемещения на холостом ходу сопровождается перерегулированием.
Работа под нагрузкой (рис.8.8,б) происходит на скорости меньше максимальной, увеличивается время работы на установившейся скорости, остановка происходит с заданным ускорением. Поскольку электродвигатель вращается с меньшей, чем максимальная, скоростью, то отработка заданного перемещения происходит без перерегулирования.
На рис.8.9 представлены переходные процессы позиционной СУЭП при отработке средних перемещений uзп = 3В на холостом ходу (рис.8.9,а) и под нагрузкой (рис.8.9,б).
При отработке средних перемещений РП не заходит в область ограничения, т.е. регулятор начинает работать на параболическом участке характеристики. Выходное напряжение РП снижается по зависимости (8.11), при этом ЗИ отрабатывает разгон электропривода с заданным ускорением, т.к. на входе ЗИ напряжение с выхода РП больше напряжения с выхода ЗИ. Как только напряжение с выхода РП становится равным напряжению с выхода ЗИ, выходное напряжение ЗИ начинает снижаться под действием снижающегося выходного напряжения РП. Выходное напряжение РП снижается в соответствии с (8.11), формируя заданное ускорение при торможении электропривода.
Отработка средних перемещений происходит по треугольной тахограмме, электропривод работает с заданным ускорением при разгоне и торможении, формируемым задатчиком интенсивности на входе РС. Отработка средних перемещений, так же, как и больших, сопровождается перерегулированием на холостом ходу и отсутствием перерегулирования при работе под нагрузкой.
Поскольку позиционный электропривод в большинстве случаев работает, как правило, под нагрузкой, то настройку СУЭП, отрабатывающую заданное перемещение под нагрузкой без перерегулирования, можно считать правильной.
На рис. 8.10 показаны переходные процессы работы позиционной СУЭП при отработке малых перемещений uзп = 0,1 В.
300