Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
В некоторых случаях вместо промежуточных реле KV на якорь двигателя подключаются катушки контакторов KM1 и KM2.
Достоинством данного узла пуска является простота и дешевизна его реализации.
К недостаткам можно отнести:
-неточность срабатывания реле в холодном и горячем состоянии
катушек;
-зависимость времени пуска (торможения) от величин статического момента и момента инерции, напряжения питающей сети, температуры сопротивлений и катушек;
-изменение скоростей переключения ступеней пускового резистора и бросков тока при колебаниях подводимого напряжения;
-возможность задержки процесса пуска на промежуточной скорости вращения, что вызывает перегрев пусковых резисторов.
Данный узел пуска применяют в приводах малой мощности, например, в станочном электроприводе.
Управление в функции скорости (ЭДС) наиболее широко применяется при осуществлении торможения электродвигателя, т.к. в этом случае торможение будет обеспечиваться до тех пор, пока двигатель вращается (т.е. пока скорость двигателя отлична от нуля).
В качестве примера рассмотрим узел динамического торможения двигателя, представленный на рис. 1.6.
26
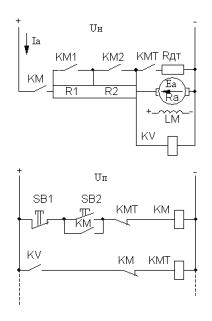
Рис.1.6. Узел динамического торможения двигателя
При работающем двигателе, напряжение на катушке реле KV uKV = kФωС + ICRa достаточно для его срабатывания и реле втянуто.
При нажатии на кнопку SB1 («Стоп») отключается контактор KM, двигатель отключается от сети и продолжает вращаться по инерции, при
этом uKV = kФωС и реле остается втянутым. Размыкающий контакт
KM в цепи катушки контактора торможения KMT замыкается и подает напряжение через замкнутый контакт KV на катушку KMT. Контактор KMT срабатывает и своим замыкающим контактом подключает к якорю двигателя резистор динамического торможения Rдт. Теперь в якорной цепи протекает ток под действием ЭДС двигателя, поэтому ток якоря (момент) изменяет свое направление, т.е. становится тормозным. Двигатель переходит на характеристику динамического торможения (рис.1.7) и останавливается.
27
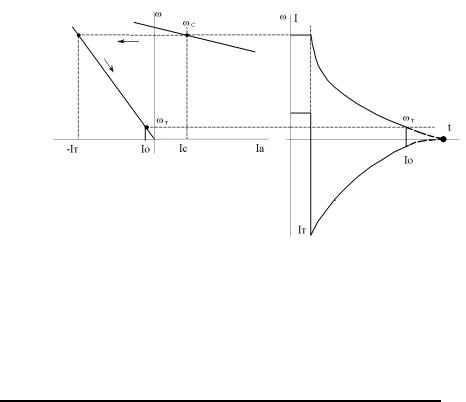
Рис.1.7. Характеристики динамического торможения
При скорости двигателя ωТ близкой к нулю, реле KV отпадает и отключает катушку контактора торможения KMT. Прекращается электрическое торможение двигателя и, как правило, накладывается механический тормоз на вал двигателя, или торможение происходит под действием статического момента (пунктирные линии после ωТ на рис.
1.7).
Контрольные вопросы:
1.Почему управление в функции времени, как правило, не применяют для управления тормозными режимами?
2.Как осуществляется выдержка времени в РКСУ?
3.С какой целью применяют символическое описание работы
РКСУ?
4.Какие достоинства и недостатки присущи управлению пуском в функции времени?
5.Как правильно рассчитать уставку реле времени?
6.Как влияет нагрузка электропривода на уставку реле времени?
7.Какие достоинства и недостатки присущи управлению в функции времени?
8.Как контролируется скорость вращения электродвигателя при управлении пуско – тормозными режимами в функции скорости?
28
9.От чего зависит напряжение срабатывания реле контроля скорости?
10.Какие меры принимают для выравнивания напряжения срабатывания реле контроля скорости?
11.Какие достоинства и недостатки присущи данному принципу управления?
12.Почему управление в функции скорости применяют в основном для остановки двигателя?
13.Выполните символическое описание работы схемы на рис.1.6.
14.Свяжите работу схемы рис.1.6 с характеристиками на рис.1.7.
15.Разработайте схему динамического торможения в функции скорости для асинхронного двигателя, составьте описание ее работы и представьте соответствующие механические характеристики.
1.4.1. Реле противовключения
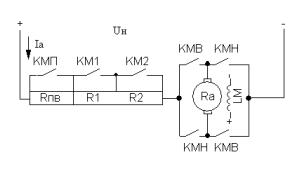
Принцип управления в функции скорости (ЭДС) используется и при обеспечении торможения противовключением в реверсивных электроприводах, где вслед за торможением происходит пуск двигателя в противоположном направлении. В этом случае якорь двигателя включается в реверсивный мост, образованный контактами контакторов направления «Вперед» (КМВ) и «Назад» (КМН), которые изменяют полярность подводимого к якорю напряжения (рис.1.8). В режиме противовключения меняется полярность приложенного к якорю двигателя напряжения, поэтому напряжение сети и ЭДС двигателя действуют согласно и ток якоря увеличивается.
Рис.1.8. Схема реверсивного электропривода с режимом торможения противовключением
29
Для ограничения тока допустимой величиной в якорную цепь кроме пускового резистора RП включают резистор противовключения RПВ, величина которого определяется выражением:
RПВ = UН I+ Emax − Rп − Ra ,
доп
где Emax – максимальная ЭДС (Emax≈ UН), В; Iдоп – допустимый ток, А;
Ra – сопротивление якорной цепи двигателя, Ом.
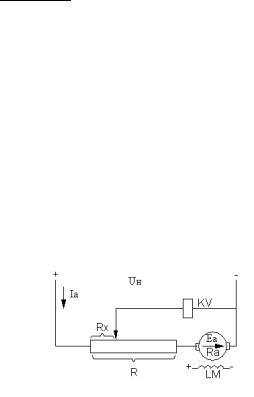
Таким образом, при пуске двигателя резистор противовключения должен быть зашунтирован, т.к. пусковой резистор ограничивает величину якорного тока на уровне допустимого, резистор противовоключения должен быть введен в якорную цепь только на время режима торможения противовключением. Управление контактором противовключения (резистором противовключения) осуществляет реле противовключения, которое подключают к якорю двигателя по схеме, изображенной на рис. 1.9.
Рис. 1.9. Схема подключения реле противовключения
Напряжение на катушке реле противовключения в соответствии со схемой (рис. 1.9) определяется зависимостью:
uKV = UН −IaRx ,
а ток двигателя в режиме противовключения равен:
30