Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
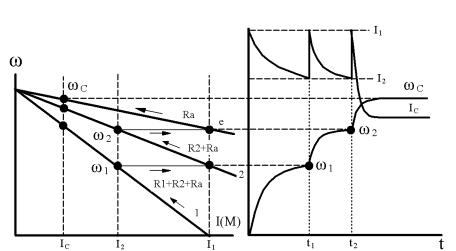
Рис. 1.3. Электромеханические характеристики и переходные процессы припуске двигателя в две ступени
Для ограничения пускового тока допустимой величиной включены два пусковых резистора R1 и R2. Поэтому, при подключении якоря двигателя к напряжению питающей сети, по якорной цепи станет протекать пусковой ток I1, определяемый следующей зависимостью:
I1 |
= |
Uн |
|
≤ λIн , |
|
R1+ R2 |
+ Ra |
||||
|
|
|
где λ- перегрузочная способность двигателя (2 … 2,5); Iн – номинальный ток двигателя;
R1 и R2 – сопротивление пусковых резисторов;
Ra =β(rяо+ rдп + rко)– сопротивление якоря двигателя, включающее в себя сопротивление обмоток якоря rяо, добавочных полюсовдвигателяr;дп и компенсационной rко, приведенное к рабочей температуре
β= 1,24…1,32 – коэффициент приведения к рабочей температуре 800С.
16
При линейных электромеханических (механических) характеристиках двигателя переходные процессы (изменение параметров во времени) будут экспоненциальными, и соответствовать уравнениям
[9,14]:
ω(t) = ω |
устi |
+(ω |
начi |
−ω |
устi |
)exp(− |
|
t |
|
) |
|
||
Tмi |
|
||||||||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
I(t) = Iустi +(Iначi −Iустi )exp(− |
t |
|
) |
|
|
|
|||||||
Tмi |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M(t) = Mустi +(Mначi −Mустi )exp(− |
|
t |
) |
||||||||||
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Tмi |
||
где ωначi |
- начальное значение скорости двигателя, с которой |
||||||||||||
начинается расчет переходного процесса для i-той характеристики, 1/с; |
|||||||||||||
ωустi - |
|
установившееся |
значение |
|
скорости, соответствующее |
||||||||
нагрузке двигателя (Iс), до которой разогнался бы двигатель на i-той характеристике, 1/с;
T |
= |
JΣRi |
- электромеханическая постоянная времени |
|
|||
мi |
|
(kФн )2 |
|
|
|
|
|
электропривода для i-той характеристики, с; |
|||
JΣ - |
суммарный приведенный момент инерции электропривода, |
||
кгм2; |
|
|
|
Ri - |
суммарное сопротивление якорной цепи на i-той |
||
характеристике; |
|
||
kФн = Uн − Iн Ra - постоянная двигателя, Вс,
ωн
k = p2пπNa - конструктивный коэффициент двигателя, зависящий от
числа пар главных полюсов pп, числа активных сторон якорной обмотки N и числа пар параллельных ветвей якорной обмотки a.
17
Например, для первого этапа пуска по реостатной характеристике
1:
|
|
ω |
= 0 |
, |
ω |
уст1 |
= Uн −Iс (R1+ R2 + Ra) |
, |
|||||||
|
|
нач1 |
|
|
|
|
|
|
|
kФн |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
T |
= |
JΣ (R1+ R2 + Ra) |
, I |
нач1 |
= I |
, I |
|
= I |
|
. |
|
||||
|
(kФн )2 |
|
|
|
|
||||||||||
м1 |
|
|
|
|
|
1 |
|
уст1 |
|
с |
|
|
|||
Под действием пускового тока (момента) двигатель начнет разгоняться по реостатной характеристике 1 (рис.1.3) с динамическим током (моментом), равным разности между действительным током двигателя и током статическим (Ia – Ic).
При увеличении противоЭДС двигателя ток якорной цепи уменьшается (следовательно, уменьшается динамический ток, соответственно, уменьшается и ускорение) и в момент времени t1 двигатель разгонится до скорости ω1, а ток уменьшится до величины I2 (рис. 1.3.), определяемой соотношением:
I2 |
= |
Uн − kФω1 |
|
R1+ R2 + Ra |
|||
|
|
В этот момент необходимо выключить пусковой резистор R1, для чего нужно замкнуть контакт КМ1. Поскольку скорость двигателя не может измениться мгновенно, то двигатель с величиной скорости ω1 переходит на реостатную характеристику 2, при этом ток скачком возрастает до величины I1, в соответствии с выражением:
I1 = Uн − kФω1 .
R2 + Ra
Для этапа разгона по второй реостатной характеристике справедливы соотношения:
ω |
= ω = Uн − I2 (R1+ R2 + Ra) |
= |
Uн − I1(R2 |
+ Ra) |
, |
|
|
|
|||||
нач2 |
1 |
kФн |
|
kФн |
|
|
|
|
|
|
|
||
|
|
18 |
|
|
|
|

ωуст2 = Uн−Iс (R2 + Ra) , Tм2
kФн
Iнач2 = I1 , Iуст2 = IС .
Двигатель продолжает разгон характеристике и в момент времени t2 уменьшается до величины I2, равной:
= JΣ(R2 + Ra) ,
(kФн )2
по второй реостатной достигает скорости ω2, а ток
I2 = Uн − kФω2 .
R2 + Ra
В этот момент необходимо выключить пусковой резистор R2, для чего нужно замкнуть контакт КМ2. Поскольку скорость двигателя не может измениться мгновенно, то двигатель с величиной скорости ω2 переходит на естественную характеристику (е), при этом ток скачком возрастает до величины I1, в соответствии с выражением:
I1 = Uн −kФω2 . Ra
Двигатель продолжает разгон по естественной характеристике до скорости ωс, соответствующей статическому току IС, при этом установившееся значение якорного тока будет определяться соотношением:
Ia = Uн −kФωc = IС
Ra
Таким образом, на основании анализа переходных процессов пуска двигателя (рис. 1.3), можно сделать вывод о том, что выключение пусковых резисторов должно происходить в определенные моменты времени (t1, t2), при определенной величине скорости вращения (ω1, ω2) и при определенной величине якорного тока (I2).
Поэтому управление пуско – тормозными режимами двигателей в РКСУ осуществляется:
19

-в функции времени;
-в функции скорости (ЭДС);
-в функции тока (момента).
Данные способы управления пуско – тормозными режимами электродвигателей реализованы во всех схемах РКСУ как на постоянном, так и на переменном токе.
Контрольные вопросы:
1.Какие системы управления относят к релейно – контакторным?
2.Какими достоинствами обладают РКСУ?
3.Какие недостатки присущи РКСУ?
4.Какие правила необходимо выполнять при изображении принципиальных электрических схем РКСУ?
5.Как маркируют в электрических схемах элементы, принадлежащие одному и тому же электрическому аппарату?
6.Что такое комбинированная система буквенных обозначений?
7.С какой целью в якорную цепь электродвигателя включают пусковые резисторы?
8.Какой должна быть пусковая диаграмма при правильно рассчитанных ступенях пусковых резисторов?
9.По каким зависимостям изменяются скорость и ток двигателя при реостатном пуске?
10.Что происходит с динамическим током (моментом) при реостатном пуске?
11.Как изменяется электромеханическая постоянная времени электропривода при реостатном пуске?
12.Почему реостатный пуск не происходит при постоянном ускорении?
13.На каком основании выведены принципы управления пуско - тормозными режимами двигателей?
14.Какие принципы управления пуско – тормозными режимами реализуются в РКСУ?
1.3. Управление пуско – тормозными режимами в функции времени
Данный принцип управления применяют в основном для управления пуском электродвигателей, т. к. управление торможением в функции времени возможно лишь для ограниченного типа электроприводов с постоянным моментом сопротивления на валу (т.е. с
20