Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
схеме рис.5.55,б передаточная функция замкнутого контура регулирования скорости будет представлена следующим уравнением:
Wзкс (p) = |
ω(p) |
= |
|
|
|
|
1/ kос |
|
|
, |
|||
uзс (p) |
8Tµp(4Tµp(2Tµp(Tµp +1) +1) |
+1) |
+1 |
||||||||||
|
|
|
|
||||||||||
тогда выражение (5.53) примет вид: |
|
|
|
|
|||||||||
Ia (p) = |
U0 (p) |
Tмс |
1 |
, |
(5.59) |
|
|
|
|||||
Rэkос |
|
Q4 (p) |
|
|
|
||||||||
|
Tзи |
|
|
|
|
|
|
||||||
где Q4 (p) - оптимальный полином четвертого порядка, который на
основании таблицы 1 определяет оптимальный переходный процесс якорного тока с перерегулированием σ = 6,2% и временем нарастания
14,4 Tµ .
Для анализа динамических свойств двукратно – интегрирующей системы управления при пуске от ЗИ с дополнительным фильтром в схему модели на рис.5.50 необходимо включить на входе РС звено с
передаточной функцией 1(8Tµp +1) . В этом случае выходное
напряжение ЗИ поступает на вход фильтра, на выходе которого формируется напряжение задания скорости uзс , подаваемое на вход ПИ
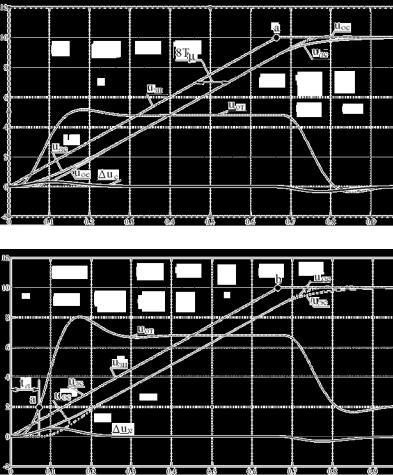
РС. На рис.5.60 представлены результаты моделирования при пуске от ЗИ в режиме холостого хода (рис.5.60,а) и под нагрузкой (рис.5.60,б).
Как видно из рис.5.60 выходное напряжение ЗИ uзи , подаваемое на вход фильтра, изменяется линейно с заданным темпом; напряжение на выходе дополнительного фильтра uзс изменяется с тем же темпом, что и
напряжение uзи , но с запаздыванием, определяемым величиной постоянной времени фильтра 8Tµ . На входе РС формируется ошибка регулирования скорости ∆uc , но в отличие от рис.5.57, теперь напряжение обратной связи по скорости uос сравнивается на входе РС с
выходным напряжением фильтра uзс , а не ЗИ, поэтому и происходит снижение перерегулирования в токе.
221
а)
б)
Рис.5.60. Переходные процессы при пуске от ЗИ в двукратно – интегрирующей СУЭП с дополнительным фильтром на входе РС
На рис.5.60,б представлены переходные процессы пуска от ЗИ под нагрузкой ( Ic = 0,5Iн ), при этом появляется время задержки tЗ , в
течение которого формируется величина задания статического тока, при этом увеличивается перерегулирование в якорном токе. Установившееся значение якорного тока обеспечивает заданное ускорение, формируемое
222
ЗИ, и составляет Ia уст = Ia дин + Iс = 1,2Iн + 0,5Iн =1,7Iн . Поскольку
пуск электродвигателя происходит с тем же ускорением, что и на холостом ходу, то выход на заданную установившуюся скорость происходит так же, как и на рис.5.60,а, при этом формируется такая же
ошибка регулировании скорости ∆uc , которая снимает заданную
величину динамического тока, поэтому установившееся значение якорного тока после окончания пуска будет соответствовать величине
момента нагрузки на валу Ia уст = Iс = 0,5Iн .
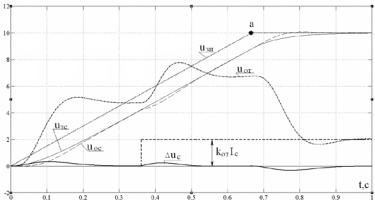
На рис.5.61 показана реакция двукратно – интегрирующей СУЭП на скачкообразное приложение момента нагрузки во время пуска от ЗИ. При появления момента сопротивления на валу электродвигателя
( Iс = 0,5Iн ) электродвигатель не может продолжать разгон с заданным ускорением, поэтому напряжение обратной связи по скорости uос начинает отклоняться от напряжения uзс , что приводит к появлению ошибки ∆u c > 0 на входе РС и возрастанию величины якорного тока.
Рис.5.61. Переходные процессы при набросе нагрузки в режиме пуска от ЗИ
Поскольку возмущающее воздействие ( Iс ) проходит через РС с форсирующей составляющей (8Tµp +1) (см. структурную схему на рис.5.43), то возрастает перерегулирование в якорном токе (σ > 6,2%).
223
Увеличение якорного тока произойдет на величину статического тока для обеспечения заданного ускорения электродвигателя. Выход на заданную установившуюся скорость вращения происходит так же, как на рис.5.60,б, с тем же перерегулированием в скорости и той же ошибкой
∆uc < 0 , которая «сбрасывает» величину динамического тока, оставляя на выходе РС задание величины тока нагрузки Ia уст = Iс = 0,5Iн .
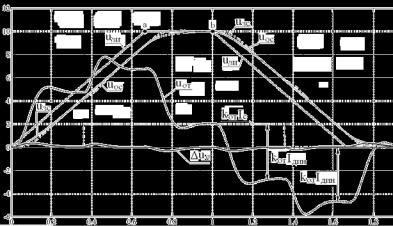
На рис.5.62 представлены переходные процессы при работе по трапецеидальной тахограмме при приложении нагрузки на этапе разгона и снятии нагрузки на этапе торможения.
Рис.5.65. Работа по трапецеидальной тахограмме с ЗИ
Разгон и выход на заданную установившуюся скорость вращения происходит аналогично рис.5.61. В т. b напряжение задания на входе ЗИ
скачком снижается до нуля, поэтому выходное напряжение ЗИ uзи начинает снижаться с заданным темпом. Выходное напряжение фильтра
uзс |
на входе РС также начинает уменьшаться с тем же самым темпом, |
|
что |
и uзи , |
но с запаздыванием 8Tµ . Уменьшение напряжения |
uзс приводит |
к появлению отрицательной ошибки регулирования |
|
∆uc < 0 (т.к. |
напряжение uос запаздывает относительно uзс ) на входе |
|
РС, что вызывает уменьшение величины якорного тока. Электродвигатель переходит в режим рекуперативного торможения с
224
заданным темпом, определяемым соотношением − U0 / Tзи , при этом РС формирует заданную величину отрицательного динамического тока, при
котором |
в |
якорной |
цепи |
будет |
протекать |
|
ток: |
|
Ia уст = −Ia дин + Iс = −1,2Iн + 0,5Iн = −0,7Iн . При сбр |
осе |
нагрузки |
||||||
( Iс = 0) электродвигатель не может тормозиться с заданным темпом, т.к. |
||||||||
Ia уст = −0,7Iн |
< −Ia дин , поэтому отклонение |
напряжения |
uос |
от |
||||
заданного темпа приводит к появлению отрицательной ошибки ∆uc |
< 0 |
|||||||
на входе |
РС |
и увеличению |
величины |
якорного тока |
до |
значения |
||
Ia уст = −Ia дин = −1,2Iн , обеспечивающего заданный темп торможения. После того, как uзс станет равным нулю, на входе РС будет присутствовать только напряжение uос , формируя положительную
ошибку регулирования скорости ∆uc > 0 , за счет которой РС снижает ток в якорной цепи до нуля.
Таким образом, включение ЗИ на входе РС формирует заданный темп изменения скорости (заданное ускорение электродвигателя) во всех режимах работы электропривода, при условии, что РС не заходит в ограничение.
5.5. Учет дополнительных ограничений в структурах подчиненного регулирования
Рассмотренные выше принципы и устройства обеспечивают ограничение непосредственно тех переменных, для которых предусмотрены локальные системы регулирования (тока, скорости и т.д.) со своими регуляторами. Однако реально требуется ограничение и ряда других, дополнительных переменных, для которых специальные контуры регулирования не предусмотрены. Одной из таких величин, требующих ограничения на допустимом уровне, является производная якорного тока по времени (темп изменения якорного тока) [7,8,9,12].
Ограничение темпа изменения якорного тока необходимо для обеспечения без искровой коммутации машин постоянного тока. Для большинства электрических машин постоянного тока относительный допустимый темп изменения якорного тока лежит в пределах 15 … 50 1/с (т.е. 15 … 50 номинальных значений тока в секунду). Следовательно, максимальный темп изменения якорного тока не должен превышать допустимый темп для данного типа машины. Поэтому при проектировании системы регулирования должно быть обеспечено следующее условие:
225