Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
Rэ (4Tµ + 2Tф ) |
|
|
|
∆ωсз = Ic с |
|
, |
(5.70) |
T |
|||
|
м |
|
|
в результате жесткость механической характеристики электродвигателя в однократно – интегрирующей СУЭП уменьшается.
Помимо отрицательных факторов введение дополнительного фильтра способствует повышению помехоустойчивости системы управления, а также способствует снижению пульсаций якорного тока,
обусловленных пульсациями сигнала датчика скорости.
Снижение темпа изменения якорного тока происходит и при применении ЗИ на входе РС. В этом случае переходная функция якорного тока определяется полиномом не второго (как при пуске под отсечку), а третьего порядка по зависимости (5.48). Продифференцировав (5.48) и найдя максимум производной получим следующее выражение
[7]:
di* |
|
i*уст |
|
|||
|
a |
|
|
|
|
|
≈ 0,21 T . |
(5.70) |
|||||
|
dt |
|||||
|
max |
µ |
|
|
||
Как видно из (5.68) и (5.70) при одинаковых пусковых токах применение ЗИ скорости позволяет снизить темп нарастания тока примерно на 40% в сравнении варианта пуска под отсечку.
5.5.2. Ограничение производной тока якоря при помощи задатчика интенсивности на входе регулятора тока
Наиболее часто для ограничения производной якорного тока применяют задатчик интенсивности, включенный на входе РТ. На рис.5.66 приведена структурная схема замкнутого токового контура (ЗТК), настроенного на МО, на входе которого включен задатчик интенсивности тока (ЗИТ), состоящий из релейного элемента РЭл и
интегратора И с постоянной времени интегрирования Tзит .
231

|
|
|
|
|
|
|
РЭл |
|
|
|
И |
ЗТК |
|
|
|
|
|
|
|
|
||||||||||
uрс |
|
|
|
|
|
|
U0 |
|
uзт |
|
|
|
|
Ia |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
1 |
|
|
1/ kот |
|
|
|
|
|
d |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
p |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тзит р |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2Tµp(Тµр +1) |
+1 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.5.66. Ограничение производной якорного тока при помощи задатчика интенсивности
При линейном изменении выходного напряжения ЗИ (при линейном изменении напряжения задания якорного тока uзт ) в
соответствии со структурной схемой на рис.5.66 можно записать следующее уравнение:
dia (p) = |
U0 |
|
1/kот |
|
|
p = |
U0 |
|
1/ kот |
. (5.71) |
||
T p 2T p(T p +1) |
+1 |
T |
|
|||||||||
dt |
|
|
Q |
2 |
(p) |
|
||||||
|
зит |
µ µ |
|
|
|
зит |
|
|
|
|
||
Как видно из (5.71) переходный процесс производной тока якоря определяется полиномом Q2 (p), и в соответствии с таблицей 1, будет описываться выражением:
dia (t) = |
U0 |
|
(1−e−t / 2Tµ (cos(t / 2Tµ ) +sin(t / 2Tµ ))) (5.72) |
T k |
|
||
dt |
от |
||
|
зит |
||
т.е. изменению во времени производной якорного тока соответствует оптимальный переходный процесс с перерегулированием 4,3% и временем нарастания 4,7Тμ. Тогда относительное максимальное значение производной якорного тока будет равно:
di |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U0 |
|
|
|
|
|||
|
dt |
Iн |
|
=1,0432 |
|
|
. |
(5.73) |
||||
T |
k |
|
I |
|
||||||||
|
|
|
|
|
от |
н |
|
|||||
|
|
|
|
зит |
|
|
|
|||||
|
|
|
|
max |
|
|
|
|
|
|
|
|
|
|
|
|
232 |
|
|
|
|
|
|
|
|

Из выражения (5.73) можно определить необходимую величину постоянной времени интегрирования ЗИТ для ограничения производной якорного тока на требуемом уровне:
Tзит = |
1,0432U0 |
, |
(5.74) |
(di*a / dt)треб kотIн |
где (di*a /dt)треб - требуемая по техническим данным электродвигателя величина темпа изменения якорного тока.
Пример 16. Определить постоянную времени интегрирования задатчика интенсивности тока для ограничения темпа изменения якорного тока на уровне (di*a/dt)треб = 50.
Для расчета постоянной времени интегрирования задатчика интенсивности, зададимся величиной напряжения ограничения РЭл на уровне U0=10В и по выражению (5.74) рассчитаем необходимую постоянную времени интегратора задатчика интенсивности тока якоря:
Тзит = 1,0432*U0/((dia*/dt)требkотIн) = 1,0432*10/(50*0,0208*192) = 0,05с.
На рис.5.77 показана реакция контура регулирования якорного тока, настроенного на МО, с включенным на входе задатчиком интенсивности тока с параметрами, рассчитанными в примере 16, на скачкообразное задание максимального тока якоря (iуст = 2,5).
На рис.5.77 представлены относительные значения выходного сигнала ЗИТ i*зт , тока якоря i*a и производной якорного тока di*a / dt с
масштабным коэффициентом 0,1. Как видно из рис.5.77 ток якоря изменяется во времени с заданным темпом, определяемым задатчиком интенсивности тока, при этом относительный темп изменения якорного тока ограничен на требуемом уровне 50 Iн/с.
На практике в современных СУЭП для ограничения производной якорного тока наиболее часто применяют задатчик интенсивности якорного тока, устанавливаемый на входе регулятора тока.
233
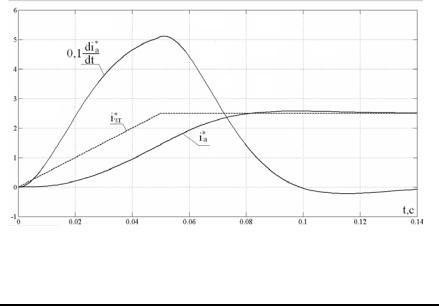
Рис.5.77. Реакция токового контура с задатчиком интенсивности тока на скачкообразное задание тока
Контрольные вопросы:
1.Какие параметры влияют на величину динамического тока в двукратной СУЭП?
2.Как изменяется установившееся значение скорости при пуске от ЗИ в двукратной СУЭП?
3.Как получить уравнения переходных процессов при пуске от ЗИ
вдвукратной СУЭП?
4.Объясните вид переходных процессов при пуске от ЗИ на холостом ходу и под нагрузкой. В чем их сходство и в чем они отличны?
5.В чем отличие переходных процессов при пуске от ЗИ с фильтром на входе РС и без дополнительного фильтра на входе РС?
6.Объясните характер протекания переходных процессов при торможении от ЗИ?
7.С какой целью необходимо ограничивать темп изменения якорного тока?
8.Какие способы применяют для ограничения темпа изменения якорного тока в СПРК?
9.Какие особенности присущи ограничению темпа изменения якорного тока включением фильтра на входе РТ?
234
10.С какой целью на входе РТ устанавливают задатчик интенсивности?
11.Какие параметры определяют темп изменения якорного тока с ЗИ на входе РТ?
12.Как правильно рассчитать постоянную интегрирования ЗИ на
входе РТ?
ГЛАВА 6. СУЭП С ОБРАТНОЙ СВЯЗЬЮ ПО ЭДС ЭЛЕКТРОДВИГАТЕЛЯ
В тех случаях, когда технически невозможно реализовать обратную связь по скорости электродвигателя (например, если электродвигатель установлен на движущемся механизме и подвод напряжения к нему осуществляется при помощи троллеев), применяют обратную связь по ЭДС электродвигателя, которая пропорциональна скорости вращения электродвигателя [9,11,14,15]. Поскольку непосредственное измерение ЭДС электродвигателя невозможно, то для выделения сигнала, пропорционального ЭДС электродвигателя, используют датчики ЭДС. Реализация датчиков ЭДС рассмотрена в приложении В.
На рис.6.1 представлена структурная схема системы ТП – Д с обратной связью по ЭДС электродвигателя, в которой датчик ЭДС (ДЭ)
представлен инерционным звеном (фильтром) с постоянной времени Tф . Коэффициент пропорциональности между напряжением обратной связи по ЭДС uоэ (напряжением задания ЭДС uзэ ) и ЭДС электродвигателя
Ea получил название коэффициент обратной связи по ЭДС, который определяется отношением:
|
|
|
|
kоэ = uоэmax |
= |
uзэmax |
|
= |
(8 −10)В |
= kос . |
(6.1) |
|||||||||||||||||||||
|
|
|
kФнωmax |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
Eamax |
|
|
|
|
|
сωmax |
|
с |
|
||||||||||||||
Uу |
|
|
ТП |
Ed |
|
|
|
|
|
Ia |
|
Ic |
|
|
|
|
|
Ea |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
kп |
|
|
|
1 Rэ |
|
|
|
|
Rэ |
|
|
|
|||||||||||||||||||
|
|
|
Тµр +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тмр |
|
|
|
|
|
||||
|
|
|
|
|
|
Ea |
|
Тэр +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
uот |
|
|
|
|
|
Ia |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
kот |
|
|
|
|
|
|
|
|
|
|
Ea |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
uоэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
ДЭ |
|
|
|
kоэ |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тфр +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис.6.1. Структурная схема системы ТП – Д с обратной связью по ЭДС
235