Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked

di* |
|
|
≤ |
di* |
, |
(5.60) |
a |
|
|
a |
|||
dt |
|
max |
|
dt |
доп |
|
|
|
|
|
где i*a = ia / Iн - относительное значение якорного тока.
Оценим величину производной якорного тока, которая получается в настроенном на модульный оптимум контуре регулирования якорного тока. Реакция на скачкообразное входное воздействие настроенного на МО токового контура в соответствии с таблицей 1 имеет вид:
i*a (τ) = i*уст (1−e−τ(cos(τ) +sin(τ))) , |
(5.61) |
где i*уст - относительное установившееся значение якорного тока;
τ = t / 2Tµ - относительное время.
Выражение (5.61) можно записать в следующем виде:
i*a (t) = i*уст (1−e− |
|
|
|
t |
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
t |
|
|
||||||
2Tµ |
(cos |
|
|
+sin |
|
|
) . |
(5.62) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2Tµ |
|
|
2Tµ |
|
||||||
Продифференцировав выражение (5.62) получим изменение |
||||||||||||||||||||||||||||
производной якорного тока во времени: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
di* |
|
i*уст |
|
|
|
− |
t |
|
|
|
|
t |
|
|
|
|
|
|
|||||||||
|
= |
e |
2Tµ sin |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
(5.63) |
||||||||
|
|
Tµ |
|
|
|
2Tµ |
|
|
|
|
||||||||||||||||||
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Для определения максимума производной якорного тока |
||||||||||||||||||||||||||||
необходимо найти вторую производную тока: |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
i*уст |
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|||||
d2i* |
|
2 |
|
|
|
|
|
− |
|
|
|
|
t |
|
π |
|
|
|
||||||||||
= |
|
|
|
e |
2Tµ sin( |
|
|
− |
) . |
|
||||||||||||||||||
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.64) |
||||||||||||
|
2Tµ |
|
|
2Tµ |
4 |
|||||||||||||||||||||||
dt2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
226 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Для определения экстремума первой производной необходимо приравнять нулю вторую производную:
|
|
|
i*уст |
|
|
|
|
t 0 |
|
|
|
|
|
|
|
|
|
d2i* |
|
|
2 |
|
|
− |
|
t |
|
|
π |
|
|
|
|||
|
= |
|
e |
2Tµ sin( |
|
0 |
− |
) = |
0. |
|
|||||||
a |
|
|
|
|
|
|
|
|
(5.65) |
||||||||
|
2Tµ |
|
|
2Tµ |
4 |
||||||||||||
dt2 |
t =t 0 |
|
|
|
|
|
|
|
|
|
|||||||
Из последнего |
выражения |
|
определим |
|
время t0 , при |
котором |
|||||||||||
di*a dt достигает максимума:
|
|
|
|
t |
0 |
= πT . |
|
|
(5.66) |
|||
|
|
|
|
|
2 |
µ |
|
|
|
|
||
Если t0 подставить в выражение |
(5.63), то получим |
значение |
||||||||||
максимума производной якорного тока: |
|
|
|
|
|
|||||||
di* |
|
|
|
|
i*уст |
−π |
|
|
π |
|
||
|
a |
|
|
|
|
|
|
4 |
|
|
|
|
|
= |
T e |
sin 4 . |
(5.67) |
||||||||
|
dt |
|
|
|
||||||||
|
|
max |
|
|
µ |
|
|
|
|
|
|
|
На практике вместо выражения (5.67) |
пользуются следующим |
|||||||||||
приближенным выражением: |
|
|
|
|
|
|
|
|
|
|
|
|
|
di* |
|
|
|
|
|
|
i*уст |
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
≈ 0,322 T . |
(5.68) |
|||||||||
|
dt |
|
|
|||||||||
|
|
|
max |
|
|
|
|
µ |
|
|
|
|
Пример 15. Определить максимальное значение производной якорного тока настроенного на МО токового контура (пример 5) при максимальном задании якорного тока (i*уст=2,5).
Для определения максимального значения производной якорного тока воспользуемся выражением (5.68): (di*a/dt)max = 0,322i*уст/Tμ = 0,322*2,5/0,01 = 80,5. Это превышает допустимую величину темпа
227
изменения якорного тока, равную 15 … 50, что делает невозможным пуск электродвигателя под отсечку.
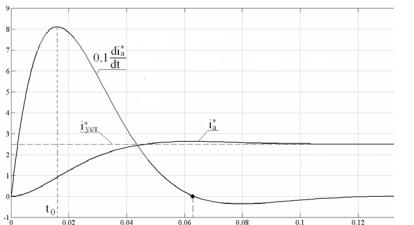
На рис.5.63 показаны переходные процессы для примера 15 реакции токового контура, настроенного на МО, на максимальное
скачкообразное задание i*уст = 2,5 и соответствующая производная якорного тока с коэффициентом передачи 0,1.
Как видно из рис.5.63 производная якорного тока достигает
максимума в момент времени t |
0 |
= |
πT = 3,14 * 0,01/ 2 = 0,0157 с, и |
|
|
2 µ |
максимальное значение производной якорного тока превышает 80 номинальных значений якорного тока в секунду.
Рис.5.63. Производная якорного тока при пуске под отсечку
Как видно из (5.68) снижение величины производной якорного тока возможно уменьшением величины i*уст , однако это повлечет за
собой снижение пускового момента, что нерационально с позиций использования перегрузочной способности электродвигателя. Снижение темпа нарастания тока якоря возможно за счет увеличения
некомпенсируемой постоянной времени Tµ . Однако, это тоже нежелательно, т.к. влечет уменьшение быстродействия токового контура.
Рассмотрим примеры снижения величины производной якорного тока, применяемые на практике.
228

5.5.1. Ограничение производной тока якоря при помощи фильтра на входе регулятора тока
На рис.5.64 представлена структурная схема однократно - интегрирующей СУЭП с включенным добавочным фильтром ДФ на входе РТ. Включение фильтра приводит к увеличению некомпенсируемой постоянной времени в контуре регулирования скорости, при этом сохраняется высокое быстродействие контура регулирования якорного тока [7].
Некомпенсируемая постоянная времени в контуре регулирования скорости увеличивается на величину постоянной времени фильтра и
становится равной 2Tµ + Tф [8,9,14,15].
uзс ∆uс |
|
РС |
uрс |
|
ДФ |
|
|
|
|
ЗТК |
Ia |
ЭМП |
|
|||||||||||
|
|
|
|
|
uзт |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
1/ kот |
|
Rэ / с |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Tфp +1 |
|
|
|
2Tµp(Тµр +1) +1 |
|
|
|
Тмр |
|
|||
|
|
uос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис.5.64. Структурная схема ограничения производной якорного тока включением фильтра на входе РТ
В этом случае коэффициент передачи РС в соответствии с (5.11) и (5.26) определяется по формуле:
kрс = |
Tм |
|
|
c |
kот . |
(5.69) |
|
2(2Tµ +Tф ) Rэ |
|||||||
|
kос |
|
|||||
На рис.5.65 показано |
семейство |
графиков (напряжения |
uот и |
||||
di*a /dt ), характеризующих влияние величины постоянной времени
фильтра на динамику контура регулирования тока якоря, где кривым 1 соответствует величина Tф = 0 , 2 - Tф = Tµ , 3 - Tф = 2Tµ , 4 -
Tф = 3Tµ , 5 - Tф = 4Tµ .
229
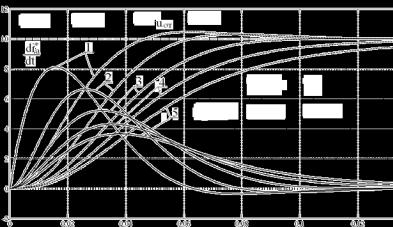
Рис.5.65. Влияние постоянной времени фильтра на величину производной тока якоря
В таблице 2 представлена зависимость относительного снижения
максимума производной тока якоря |
kпр = |
di*a / dt |
от |
(di*a / dt)max |
относительной величины постоянной времени фильтра.
Таблица 2
Зависимость kпр=f(Tф/Tμ)
Tф/Tμ |
0 |
|
1 |
|
2 |
3 |
4 |
kпр |
1 |
19 |
0,8 |
44 |
0,6 |
0,5 |
0,4 |
|
|
|
|
3 |
5 |
||
|
|
|
|
|
|
|
|
Как видно из рис.5.65 и таблицы 2 с увеличением постоянной времени фильтра темп нарастания тока при скачке задания снижается, а процесс изменения тока приближается к апериодическому.
Дополнительный фильтр позволяет ограничить темп изменения тока и момента электродвигателя при отработке не только управляющих, но и возмущающих воздействий. Вместе с тем введение дополнительного фильтра и связанное с этим уменьшение коэффициента усиления РС приводит к увеличению статической просадки скорости под нагрузкой:
230