Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
б)
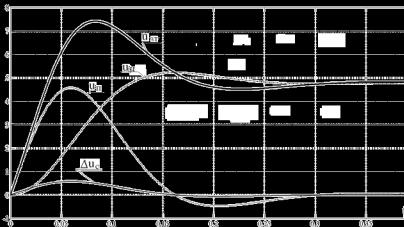
Рис.5.56. Переходные процессы начального участка пуска от ЗИ в двукратно –интегрирующей системе управления
Если uзс будет изменяться с большим темпом, то больше станет ошибка ∆uс на входе РС и, следовательно, станет больше величина
выходного напряжения РС
тока электродвигателя, ускорению.
На рис.5.57 показаны переходные процессы при пуске до максимальной скорости вращения ( u =10В) на холостом ходу в двукратно – интегрирующей системе. На установившемся участке пуска, когда ошибка регулирования на входе РС сведена к нулю ∆uс = 0 ,
выходное напряжение РС остается неизменным и равным uзт = kотIa дин , что определяет постоянство заданного ускорения электродвигателя.
В момент времени, соответствующий т. a на рис.5.57, выходное напряжение ЗИ uзс прекращает линейно изменяться во времени.
Поскольку на входе РС ничего не изменилось, то электродвигатель продолжает разгон, что приводит к появлению перерегулирования в
скорости, т.е. uос становится больше uзс , и появлению отрицательной
216
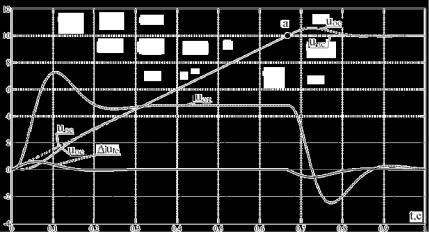
ошибки на входе РС ∆uс = uзс − uос < 0 , вследствие чего выходное напряжение РС начинает уменьшаться, следовательно, начинает уменьшаться и величина якорного тока (напряжение uот ).
Рис.5.57. Переходные процессы при пуске от ЗИ в двукратно – интегрирующей СУЭП в режиме холостого хода
ПИ регулятор скорости сводит ошибку регулирования скорости ∆uс = uзс − uос < 0 к нулю, что приводит к снижению величины
якорного тока до нуля (площади, ограниченные ∆uс и осью времени,
для положительной ∆uс > 0 и отрицательной ∆uс < 0 ошибок на
рис.5.57 равны между собой, следовательно, сумма этих площадей равна нулю, что и определяет равенство нулю выходного напряжения ПИ – РС, т.е. равенство нулю величины якорного тока на заданной установившейся скорости вращения электродвигателя).
На рис.5.58 представлены переходные процессы при пуске от ЗИ до максимальной скорости вращения ( uзсmax =10В) в двукратно –
интегрирующей СУЭП под нагрузкой ( Iс = 0,5Iн ). Наличие момента нагрузки на валу электродвигателя приводит к появлению времени задержки tЗ , когда электродвигатель остается в неподвижном состоянии пока момент, развиваемый электродвигателем меньше момента
217
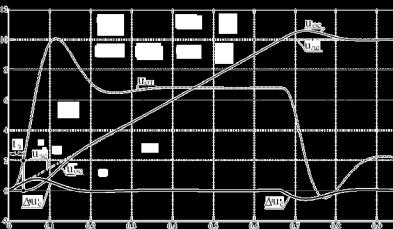
сопротивления на его валу. В этом случае на входе РС присутствует только выходное напряжение ЗИ uзс , в то время как напряжение
обратной связи по скорости равно нулю ( uос = 0). Поэтому ошибка
∆uс на входе ПИ РС будет больше, чем при пуске на холостом ходу, что вызывает увеличение значения установившегося якорного тока на величину Iс = 0,5Iн , следовательно, установившееся значение якорного
тока |
электродвигателя |
будет |
равно |
Ia уст |
= Ia дин + Iс =1,2Iн + 0,5Iн =1,7Iн . |
Электродвигатель разгоняется |
|
под |
действием заданного динамического |
тока Ia дин =1,2Iн , |
поэтому |
выход на установившуюся скорость будет происходить так же, как и на рис.5.57 с таким же перерегулированием в скорости, в результате чего
отрицательная ошибка на входе ПИ РС ∆uс < 0 , «сбросит» на выходе
РС |
напряжение |
задания |
тока, задающее величину динамического |
||||
тока uзт = kотIa дин , |
а |
на |
выходе РС останется напряжение задания |
||||
статического тока |
uзт |
= kотIс . Электродвигатель |
будет работать с |
||||
заданной максимальной |
установившейся скоростью |
вращения |
|||||
uзс |
= uос =10В, |
развивая |
требуемую величину |
момента |
на валу |
||
( Ia |
= Ic ). |
|
|
|
|
|
|
Рис.5.58. Переходные процессы при пуске от ЗИ под нагрузкой в двукратно –интегрирующей СУЭП
218
На рис.5.59 показаны сравнительные переходные процессы при пуске от ЗИ до максимальной скорости в двукратно – интегрирующей системе на холостом ходу (обозначения переменных без штрихов) и под нагрузкой (обозначения переменных со штрихами). Из рис.5.59 видно, что на начальном этапе пуска ошибка регулирования скорости при работе
под нагрузкой ∆uс/ больше ошибки регулирования скорости на
холостом ходу ∆uс за счет того, что электродвигатель остается неподвижным пока момент электродвигателя меньше момента нагрузки
на его валу и, |
следовательно, на этом этапе пуска электродвигателя |
uос =0, а ∆uс/ |
= uзс −0 > ∆uc = uзс − uос . Т.к. величина времени |
задержки начала вращения электродвигателя пропорциональна величине момента нагрузки на валу, то за время задержки на выходе ПИ РС будет сформировано задание величины якорного тока, пропорциональное
величине статического тока (для нашего примера Iс = 0,5Iн ).
Поскольку величина ошибки регулирования скорости ∆uc формирует на выходе ПИ РС величину заданного динамического тока (для нашего случая Ia дин =1,2Iн ), то величина ошибки регулирования
скорости ∆uс/ , сформирует на выходе РС напряжение задания
величины якорного тока, равное uзт = kот (Ia дин + Iс ) , что определит
для нашего примера установившееся значение якорного тока на уровне
Ia уст = Ia дин + Iс = =1,2Iн + 0,5Iн =1,7Iн .
219
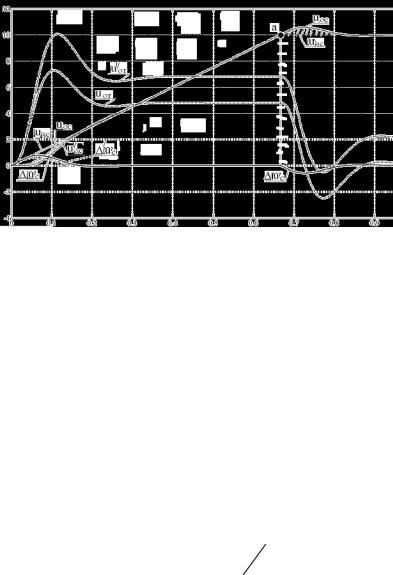
Рис.5.59. Сравнительные переходные процессы при пуске от ЗИ в двукратно –интегрирующей СУЭП
Разгон электродвигателя происходит с заданной величиной динамического тока до т. a на рис.5.59, после чего прекращается
линейное изменение выходного напряжения ЗИ uзс и происходит выход
на заданную максимальную скорость вращения электродвигателя с перерегулированием по скорости, в результате чего формируется
отрицательная ошибка регулирования скорости ∆uc = ∆uс/ < 0 ,
«сбрасывающая» с выхода ПИ РС величину заданного динамического тока. Поэтому в режиме холостого хода выходное напряжение РС по
завершении пуска будет равно нулю - uзт = 0 , а при разгоне под
нагрузкой – выходное напряжение РС будет задавать необходимую величину якорного тока, соответствующую величине тока нагрузки -
uзт/ = kотIс .
Рассмотрим двукратно – интегрирующую систему регулирования, когда на входе ПИ РС в цепи задания установлен дополнительный
фильтр |
с передаточной функцией |
W (p) = |
1 |
(8Tµp +1) |
. В этом |
|
|
дф |
|
|
|
|
|
|
|
|
|
случае |
происходит компенсация |
влияния |
форсирующего звена |
||
(8Tµp +1) в числителе передаточной функции Wзкс (p) и в структурной
220