Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
На рис.5.51,б показаны переходные процессы при пуске электродвигателя с номинальным моментом сопротивления на валу
электродвигателя ( Ic = Iн ). В этом случае дви жение электропривода начинается тогда, когда момент электродвигателя превысит момент нагрузки (т.е. когда выполнится условие Ia > Ic ). Поэтому существует
отрезок времени (время задержки tз ), когда на входе РС действует только напряжение uзс , а напряжение обратной связи по скорости равно нулю. За время задержки tз на выходе РС будет сформировано напряжение uзт = kрсuзс = kотIc . Затем начинается движение
электропривода и появляется сигнал обратной связи по скорости электродвигателя. В этом случае на входе РС установится динамическая
ошибка регулирования скорости ∆uс = uзс − uос , большая, чем ошибка ∆uс = uзс − uос на рис.5.51,а, на величину, пропорциональную статическому току ( kотIc / kрс ).
Вследствие этого установившееся значение якорного тока будет равно Iуст = Iдин + Ic , поэтому разгон электропривода также будет происходить с заданным ускорением.
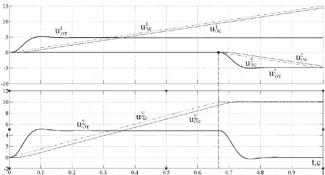
Для расчета реакций системы регулирования на линейное изменение напряжения на входе РС с заданным темпом, определяемым
отношением U0 / TЗИ , можно сформировать два противоположных линейных сигнала, смещенных во времени на величину TЗИ (рис.5.52).
Рис.5.52. Полные реакции однократной системы регулирования на сигнал ЗИ
206
На рис.5.52 показаны реакция (напряжения обратной связи по току u1от , и обратной связи по скорости u1ос ) на линейно изменяющийся с
заданным темпом U0 / TЗИ сигнал задания скорости u1зс ; реакция (напряжения обратной связи по току uот2 , и обратной связи по скорости uос2 ) на линейно изменяющийся с заданным темпом − U0 / TЗИ сигнал
задания скорости u2зс , смещенный на величину TЗИ ; и полные реакции системы регулирования как суперпозиции частных реакций на смещенные во времени линейно изменяющиеся воздействия u1зс и u2зс :
напряжения |
uотΣ = u1от + uот2 |
и uосΣ = u1ос + uос2 . |
При этом |
uΣзс = u1зс + uзс2 |
является смоделированным сигналом |
выходного |
|
напряжения ЗИ, когда на вход ЗИ скачком подается напряжение задания.
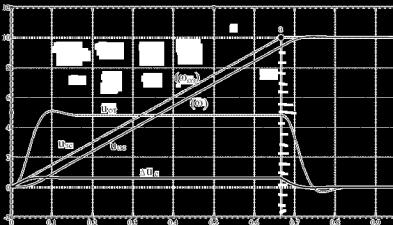
В схеме модели рис.5.50 ЗИ смоделирован в соответствии с его структурной схемой рис.5.46 и описанием (5.45), получившиеся при этом переходные процессы при пуске от ЗИ на холостом ходу и под нагрузкой представлены на рис.5.53.
а)
207
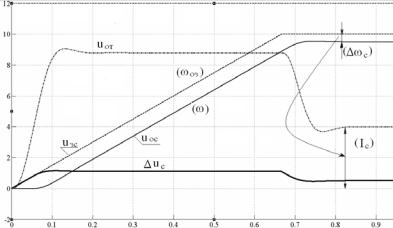
б)
Рис.5.53. Пуск от ЗИ в однократноинтегрирующей системе на холостом ходу (а) и под нагрузкой (б)
На рис.5.53,а пуск электропривода осуществляется без нагрузки (на холостом ходу), при этом установившаяся величина uот (якорного
тока) определяется постоянной величиной ошибки на входе РС ∆uс .
После точки а выходное напряжение ЗИ перестает линейно возрастать, а скорость электродвигателя продолжает увеличиваться, поэтому начинает уменьшаться ошибка на входе РС, что вызывает уменьшение величины якорного тока.
Поскольку момент нагрузки на валу электродвигателя отсутствует, то электродвигатель разгонится до скорости идеального холостого хода
( ω = ω0з ), поэтому ошибка на входе РС после завершения этапа пуска
будет равна нулю ( ∆uс = uзс − uос = 0), что и определяет нулевой ток в якорной цепи в установившемся режиме.
Переходные процессы при пуске под нагрузкой ( Iс = Iн )
отличаются тем, что увеличивается ошибка регулирования на входе РС (рис.5.53,б) вызывая увеличение якорного тока на величину статического тока, что обеспечивает пуск с заданным ускорением (заданным динамическим током). В этом случае электродвигатель разгоняется до скорости, меньшей скорости идеального холостого хода, следовательно, в установившемся режиме работы на входе РС будет существовать
208
отличная от нуля ошибка регулирования скорости ∆uс = uзс − uос ≠ 0 ,
пропорциональная величине статической просадке скорости, поэтому на выходе РС будет сформировано напряжение задания тока якоря,
пропорциональное величине тока нагрузки uзт = kотIc , и в якорной цепи будет протекать ток Ia = Ic = Iн .
На рис.5.54 показаны переходные процессы пуска в однократноинтегрирующей системе регулирования от ЗИ, обеспечивающего
величину динамического тока |
Iдин =1,2Iн . На рис.5.54,а |
пуск |
электродвигателя начинается |
в режиме холостого хода, |
когда |
Ia = Iдин =1,2Iн . Появление нагрузки Iс = Iн на валу электродвигателя
на этапе его разгона, приводит к тому, что электродвигатель не может разгоняться с прежним заданным ускорением, т.к. теперь величина
динамического тока (момента) будет равна Iдин =1,2Iн − Iн = 0,2Iн , поэтому электродвигатель продолжает разгон с меньшим ускорением, что вызовет увеличение ошибки на входе РС ∆uс и, следовательно,
увеличение выходного напряжения РС и увеличение якорного тока. Увеличение якорного тока будет происходить до тех пор, пока не будет обеспечено заданное ускорение электродвигателя, т.е. пока ток якоря не
станет равным Ia = Iдин + Ic =1,2Iн + Iн = 2,2Iн . В дальнейшем
электродвигатель продолжит разгон с заданным ускорением до установившейся скорости, соответствующей величине нагрузки на валу электродвигателя.
209
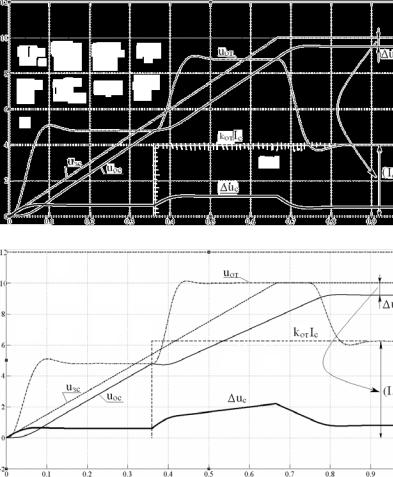
а)
б)
Рис.5.54. Пуск от ЗИ в однократноинтегрирующей системе с Iдин=1,2Iн при набросе нагрузки Iс=Iн (а) и Iс=1,6Iн (б)
Приложение нагрузки на этапе разгона электродвигателя
Iс =1,6Iн |
(рис.5.54,б) также вызывает увеличение ошибки |
регулирования на входе РС ∆uс и увеличение якорного тока. Однако в
отличие от предыдущего случая (рис.5.54,а) увеличение тока будет происходить до тех пор, пока РС не зайдет в ограничение.
210