Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
В структурной схеме однократно – интегрирующая система регулирования скорости представлена в виде замкнутого контура регулирования скорости электродвигателя ЗКС с передаточной функцией оптимального контура третьего порядка, входной координатой которого
является выход ЗИ, т.е. напряжение задания скорости uзс , а выходной - скорость вращения электродвигателя ω. Дифференцированием скорости ω получается координата якорного тока Ia .
Если ЗИ работает в режиме отработки заданного ускорения, т.е. выходное напряжение ЗИ uзс изменяется линейно с заданным темпом,
то в этом случае Рэл находится в ограничении и изменение uзс на входе
Рэл не ок азывает влияния на работу ЗИ. В этом случае структурная схема рис.5.48 может быть представлена в виде, показанном на рис.5.49, где входной координатой является напряжение ограничения U0 на входе интегратора ЗИ.
В этом случае система регулирования работает в линейном режиме, т.е. ни один из регуляторов не находится в ограничении.
U0 |
|
И |
ЗКC |
ω |
|
|
|
Ia |
|||||||
|
uзс |
|
|
|
|||||||||||
|
1 |
|
|
1/ kос |
Тмр |
||||||||||
|
|
|
Тзи р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4Tµp(2Tµp(Тµр +1) +1) +1 |
|
|
|
Rэ / с |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.5.49. Структурная схема однократноинтегрирующей системы регулирования в линейном режиме работы
Определим, как будут изменяться во времени скорость вращения электродвигателя и якорный ток при линейном задании uзс , для чего выразим передаточную функцию системы регулирования, когда входной координатой является напряжение U0, а выходной – якорный ток Ia :
W (p) = |
Ia (p) |
= |
Tм |
|
с |
1 |
|
. |
||
|
|
|
|
|
|
|||||
1 |
U0 |
(p) |
|
Tзи Rэkос 4Tµp(2Tµp(Tµp +1) +1) +1 |
|
|||||
|
|
|
||||||||
201

Из полученного выражения можно определить якорный ток:
Ia (p) = |
U0 (p) |
Tмс |
|
1 |
, |
(5.47) |
|
Rэkос Q3 (p) |
|||||||
|
Tзи |
|
|
||||
где Q3 (p) - оптимальный полином третьего порядка.
Как видно из (5.47) переходный процесс якорного тока будет
определяться |
полиномом |
Q3 (p) и |
будет |
характеризоваться |
перерегулированием σ = 8% и временем |
нарастания 7,6 Tµ . На |
|||
основании таблицы 1 переходный процесс для якорного тока будет описываться следующим выражением:
Ia (τ) = |
U0 |
Tмс |
(1−e−2τ −e−τ |
2 |
|
sin( |
|
τ)), (5.48) |
|
|
3 |
||||||||
|
|
|
|
||||||
|
Tзи |
Rэkос |
3 |
|
|
|
|
||
где τ = t / 4Tµ - относительное время.
Установившееся значение якорного тока будет соответствовать величине динамического тока, необходимого для обеспечения требуемого ускорения:
Ia уст = |
U0 |
Tмс |
= Iaдин . |
(5.49) |
|
||||
|
Tзи |
Rэkос |
|
|
Из (5.49) видно, что величина динамического тока определяется
отношением U0 / TЗИ , т.е. темпом изменения выходного напряжения ЗИ.
Для определения переходного процесса изменения во времени скорости вращения электродвигателя проинтегрируем выражение (5.48):
202
|
R |
/ c τ |
|
|
|
U |
|
|
4Tµ |
|
|
|
e−2τ |
|
||||
ω(τ) = |
Tэ |
|
∫Ia (τ)dτ =T |
0 |
|
|
(τ−1 |
+ |
2 + |
|
|
|||||||
k |
ос |
|
||||||||||||||||
|
м 0 |
|
|
|
|
зи |
|
|
|
|
|
|
||||||
+ e-τ sin( |
|
τ) + |
|
|
cos( |
|
|
τ)) = ∆ω |
|
(τ−1+ |
e−2τ |
|
||||||
3 |
3 |
3 |
|
+ (5.50) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
2 |
3 |
|
|
|
|
|
|
|
дин |
|
2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
+ e-τ sin( |
|
τ) + |
|
|
cos( |
|
|
τ)), |
|
|
|
|
|
|
||||
3 |
|
3 |
|
3 |
|
|
|
|
|
|
||||||||
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
где τ = t / 4Tµ - относительное время.
После затухания переходных составляющих в выражении (5.50) получается установившееся линейное изменение скорости вращения с заданным ускорением:
|
|
|
|
ωуст (τ) = |
U |
0 |
4Tµ |
|
(τ−1). |
(5.51) |
|
|
|
|
|
|
|
||||
|
|
|
|
|
Tзи kос |
|
|
|
||
Если в выражении (5.51) подставить значение относительного |
||||||||||
времени τ = t / 4Tµ , то получится |
следующее уравнение: |
|
||||||||
ω |
уст |
(t) = U0 |
1 |
(t − 4T ) = ∆ω |
(t − 4T ), |
(5.52) |
||||
|
||||||||||
|
Tзи |
µ |
|
|
дин |
µ |
|
|||
|
|
kос |
|
|
|
|
|
|
||
из |
которого |
следует, что |
изменение скорости |
во времени |
||||||
происходит с заданным темпом, определяемым отношением U0 / TЗИ , с запаздыванием относительно заданной скорости 4Tµ .
Пример 13. Для однократно – интегрирующей системы регулирования с параметрами, рассчитанными в примерах 5 и 11, определить динамические свойства при пуске от ЗИ, обеспечивающего величину динамического тока Iдин = 1,2*Iн.
Определим величину требуемого ускорения электродвигателя с динамическим током (моментом), равным Iдин = 1,2*Iн= 1,2*192 =230 А, если суммарный момент инерции электропривода равен JΣ= 8,52 кГм2: ε= dω/dt= Iдин*c/ JΣ= 230*3,5/8,52= 94,5 с-2. Зададимся величиной напряжения ограничения Рэл равным U0= 10В, тогда постоянная времени интегратора ЗИ на основании (5.46) будет равна: ТЗИ= 10/(94,5*0,1587)=
0,667с.
Схема модели с рассчитанными параметрами представлена на рис.5.50.
203
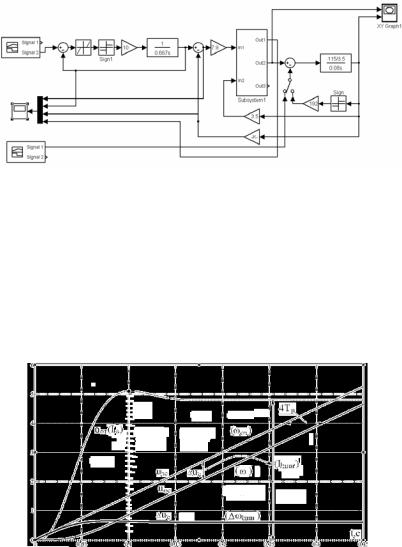
Рис.5.50. Схема модели однократноинтегрирующей системы регулирования с ЗИ
Проанализируем результаты моделирования различных режимов работы однократноинтегрирующей системы регулирования с ЗИ.
На вход ЗИ скачком подается напряжение задания, равное uз= 10В. Реакция однократноинтегрирующей системы регулирования на
линейное изменение задающего сигнала uзс при нулевых начальных
условиях представлена на рис.5.51 при пуске на холостом ходу (рис.5.51,а) и при номинальной нагрузке на валу электродвигателя
(рис.5.51,б).
а)
204
б)
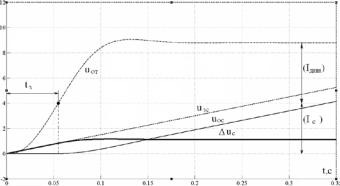
Рис.5.51. Реакция однократноинтегрирующей системы регулирования на линейное изменение напряжения uзс
На рис.5.51 представлены переходные процессы напряжений: задания скорости uзс , пропорционального заданной скорости идеального
холостого хода ω0з ; напряжения обратной связи по скорости пропорционального действительной скорости вращения электродвигателя ω ; ошибки по скорости на входе РС ∆uс = uзс − uос , пропорциональной величине динамической ошибки регулирования скорости ∆ωдин ; напряжения обратной связи по току якоря uот ,
пропорционального величине якорного тока Ia . Как видно из рис.5.51,а линейное изменение напряжения uзс вызывает линейное изменение с тем
же темпом uос |
(т.е. скорости |
электродвигателя) с |
отставанием от |
|||
напряжения uзс на величину 4Tµ . |
При этом |
установившаяся |
||||
динамическая |
(скоростная) |
ошибка |
регулирования |
скорости |
||
∆uс = uзс − uос |
на входе РС и определяет величину динамического тока |
|||||
якоря электродвигателя |
uзт |
= kрс (uзс − uос ) = kотIдин . |
Поскольку |
|||
величина ∆uс при этом остается постоянной, то и величина якорного тока также остается постоянной. Переходный процесс якорного тока характеризуется перерегулированием σ = 8% , временем нарастания 7,6 Tµ и временем достижения максимума 10 Tµ .
205