Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
При входе какого либо из регуляторов в режим ограничения соответствующий контур регулирования выходит из подчинения внешнего контура (контур размыкается). Это приводит к накоплению ошибок во внешних контурах регулирования, что может привести не только к отклонению процессов регулирования от оптимальных, но даже к нарушению устойчивости многоконтурной системы регулирования (при замыкании обратной связи из – за большого рассогласования между заданным и действительным значениями регулируемой координаты возможны большие «броски» регулируемой координаты, например, тока якоря, что может привести к срабатыванию защиты).
Поэтому в системах подчиненного регулирования используются дополнительные средства ограничения переменных. Одним из таких способов ограничения переменных при реакции системы регулирования на управляющее воздействие являются задатчики интенсивности.
5.4.2 Ограничение переменных с помощью задатчиков интенсивности
Задатчик интенсивности (ЗИ) представляет собой нелинейное устройство, которое служит для обеспечения заданного темпа (интенсивности) изменения во времени выходного напряжения, формирующего задающее воздействие на входе регулятора. Наиболее широко распространены ЗИ первого порядка, ограничивающие первую производную задающего воздействия во времени [7,8].
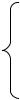
Структурная схема ЗИ первого порядка и графики, поясняющие его работу, представлены на рис.5.46.
Задатчик интенсивности состоит из последовательно включенных нелинейного элемента с релейной характеристикой РЭл и интегратора И
с постоянной времени интегрирования Tзи , охваченных отрицательной обратной связью по выходному напряжению ЗИ. Выходное напряжение
нелинейного элемента РЭл зависит от знака входного напряжения ∆u , которое определяется разностью между входным и выходным
напряжениями |
ЗИ |
∆u = uвх − uвых и описывается |
следующим |
выражением: UРЭ = U0sign(∆u) = U0sign(uвх − uвых ) , |
что можно |
||
описать следующей зависимостью: |
|
||
|
+U0 |
при uВХ > uВЫХ |
|
UРЭ= |
0 при uВХ = uВЫХ |
|
|
|
-U0 |
при uВХ < uВЫХ |
|
|
|
|
(5.45) |
|
|
196 |
|
|
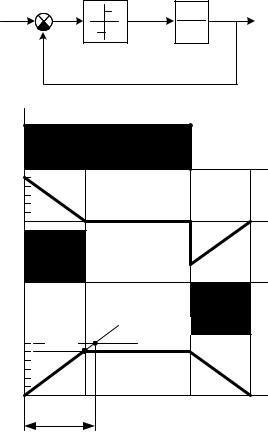
Рассмотрим принцип действия ЗИ по графикам, представленным |
||||||||
на рис.5.46. Если при нулевых начальных условиях на вход ЗИ скачком |
|||||||||
подать входное напряжение uвх , то выходное напряжение РЭл скачком |
|||||||||
достигнет установленной величины ограничения +U0 в соответствии с |
|||||||||
(5.45) |
т.к. |
uВХ > uВЫХ . |
К |
входу |
интегратора |
будет |
приложено |
||
постоянное по величине напряжение +U0, поэтому выходное напряжение |
|||||||||
интегратора (т.е. выходное напряжение ЗИ) начнет линейно |
|||||||||
увеличиваться с темпом, определяемым отношением + U0 / TЗИ . |
|||||||||
|
uвх |
|
РЭл |
|
|
И |
uвых |
|
|
|
|
u |
|
+U0 |
1 |
|
|
||
|
|
|
|
|
|
Тзи р |
|
|
|
|
uвх |
|
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
UРЭ |
|
+U0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
uвых |
|
+U0 |
|
-U0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
t1 |
|
|
t2 |
t3 |
|
|
|
|
|
ТЗИ |
|
|
|
|
|
|
|
Рис.5.46. |
Структурная |
схема |
и |
графики |
работы |
задатчика |
||
|
|
|
|
|
интенсивности |
|
|
||
|
|
|
|
|
197 |
|
|
|
|
Разность напряжений на входе РЭл ∆u = uВХ − uВЫХ по мере увеличения выходного напряжения ЗИ будет уменьшаться и в момент времени t1 станет равна нулю, что приведет к «сбрасыванию» выходного напряжения РЭл в ноль; поэтому интегратор перестает интегрировать и
на |
его |
выходе |
устанавливается |
напряжение, |
равное |
входному uВЫХ = uВХ . В |
момент времени |
t2 входное напряжение |
|||
мгновенно становится равным нулю, поэтому ошибка на входе РЭл становится отрицательной ∆u = −uВЫХ , что приводит к появлению на
выходе РЭл установленной величины ограничения –U0; поэтому выходное напряжение интегратора начнет уменьшаться с темпом,
определяемым отношением − U0 / TЗИ . В момент времени t3 выходное
напряжение ЗИ становится равным нулю, следовательно, и выход РЭл становится равным нулю.
Как видно из рассмотрения работы ЗИ, темп изменения выходного
напряжения |
ЗИ, определяемый отношением |
U0 / TЗИ , |
можно |
регулировать |
изменением напряжения ограничения РЭл |
U0, и |
|
изменением постоянной времени интегратора TЗИ .
В зависимости от темпа изменения входного напряжения ЗИ
может работать в двух режимах: |
|
|
|
|
|
||||||||||
1. если |
|
duВХ / dt |
|
≥ |
|
U0 |
/ TЗИ |
|
, |
выходное напряжение ЗИ будет |
|||||
|
|
|
|
||||||||||||
изменяться |
с |
|
заданным |
темпом, |
определяемым отношением |
||||||||||
U0 / TЗИ (режим отработки заданного темпа); |
|||||||||||||||
2. если |
|
duВХ / dt |
|
< |
|
U0 |
/ TЗИ |
|
, |
выходное напряжение ЗИ будет |
|||||
|
|
|
|
||||||||||||
изменяться |
с |
|
темпом входного напряжения |
|
duВХ / dt |
|
(режим |
||||||||
|
|
|
|||||||||||||
слежения). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пример 12. Реализовать на операционных усилителях задатчик интенсивности, настроенный на изменение выходного напряжения с темпом 40 В/с.
Одна из возможных принципиальных схем ЗИ, реализованного на операционных усилителях, представлена на рис.5.47.
198
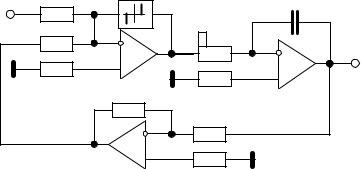
На усилителе DA1 реализован нелинейный элемент РЭл в цепи обратной связи которого отсутствует резистор обратной связи, поэтому коэффициент передачи DA1 очень большой, что и обеспечивает получение релейной характеристики. Выходное напряжение РЭл ограничено по уровню при помощи блока ограничения БО, в котором имеется возможность установки необходимой величины напряжения ограничения U0. Для обеспечения одинакового коэффициента передачи по обоим входам DA1 величины сопротивлений резисторов R1 и R2 принимаются равными, например R1 = R2 = 10 кОм. Величину напряжения ограничения блока БО примем равной U0= ±10 В.
На усилителе DA2 реализован интегратор, постоянная времени интегрирования которого определяется равенством: TЗИ = R3*C1. Для обеспечения заданного темпа ЗИ должно соблюдаться равенство: U0/ TЗИ = 40 В/с, из которого определяется величина TЗИ = U0/40 = 10/40 = 0,25 с. Зададимся величиной емкости конденсатора С1= 1 мкФ, и рассчитаем величину сопротивления резистора R3 = TЗИ/ С1 = 0,25/1*10-6 = 250 кОм. С учетом возможности подстройки величины TЗИ, примем R3 = 300 кОм.
БО |
|
|
+uвх R1 |
|
С1 |
R2 |
-U0 R3 |
+uвы |
|
|
|
DA1 |
|
DA2 |
R5 |
|
|
-uвых |
R4 |
|
|
|
|
DA3 |
|
|
Рис.5.47. Принципиальная электрическая схема ЗИ
На усилителе DA3 реализован инвертор для обеспечения отрицательной обратной связи на входе DA1 (т.е. получения различной полярности входного и выходного напряжения ЗИ), поэтому должно выполняться равенство величин сопротивлений R4 = R5. Примем R4 = R5
= 10 кОм.
199

Если ЗИ включить на входе регулятора скорости, то на выходе ЗИ будет сформировано напряжение uзс , изменяющееся с заданным
темпом, определяемым отношением U0 / TЗИ . Поэтому можно записать следующее равенство:
duзс / dt = U0 / TЗИ ,
если в последнем выражении левую и правую части разделить на коэффициент обратной связи по скорости, то получим уравнение:
duзс / kос = dω |
= ε = |
U0 |
|
, |
|
T k |
|
||||
dt |
dt |
|
ос |
||
|
|
|
ЗИ |
||
из которого легко можно определить постоянную времени ЗИ,
необходимую |
для |
формирования |
|
требуемого |
ускорения |
|||
электродвигателя: |
|
|
|
|
|
|
|
|
|
|
T |
= |
U0 |
. |
|
(5.46) |
|
|
|
|
|
|||||
|
|
ЗИ |
|
εkос |
|
|
|
|
Таким образом, для обеспечения требуемого ускорения |
||||||||
электродвигателя |
|
d ε/=dt ω необходимо |
задаться |
величиной |
||||
напряжения ограничения U0, и по (5.46) рассчитать постоянную времени |
||||||||
TЗИ , (либо задаться величиной TЗИ |
и рассчитать величину напряжения |
|||||||
ограничения U0). |
|
|
|
|
|
|
|
|
Рассмотрим |
применение ЗИ |
|
в |
СУЭП |
для формирования |
|||
требуемого ускорения электропривода.
5.4.1.1 Формирование требуемого ускорения в однократноинтегрирующей системе регулирования
Структурная схема однократно – интегрирующей системы регулирования с включенным на входе ЗИ, представлена на рис.5.48.
uз |
|
РЭл |
U0 |
|
И |
ЗКC |
ω |
|
|
|
I |
|||||||||||||||||
|
|
|
|
|
|
|
|
uзс |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
1/ kос |
Тмр |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тзи р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4Tµp(2Tµp(Тµр +1) +1) +1 |
|
|
|
Rэ / с |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.5.48. Структурная схема однократноинтегрирующей системы регулирования с ЗИ
200