Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
Рассмотрим принцип работы двукратноинтегрирующей системы регулирования на примере характеристик рис.5.40.
Предположим, что электродвигатель работает в режиме идеального холостого хода Iс = 0, когда на вход РС подано
максимальное напряжение задания скорости вращения uзсmax =10В, поэтому в установившемся режиме работы электродвигатель будет работать в т. d характеристики на рис.5.40. При этом в цепи обратной связи по скорости напряжение будет равно: uос = kосω0 max =10В, поэтому ошибка регулирования на входе РС будет равна нулю ( ∆uс = uзсmax − uос =0), напряжение на выходе РС также будет равно
нулю ( uзт =0) и ток якоря будет равен нулю.
Если на валу электродвигателя появится момент нагрузки Мс1 , то скорость электродвигателя начнет уменьшаться. На входе РС появится положительная ошибка ∆uс = uзсmax − uос > 0 , поэтому выходное
напряжение РС начнет увеличиваться, вследствие чего начнет увеличиваться якорный ток и момент электродвигателя, под действием которого скорость вращения электродвигателя восстановится до
заданной ω = ω0 max , при этом на входе РС ошибка регулирования
скорости опять станет равной нулю ∆uс = uзсmax − uос =0, однако
выходное напряжение РС будет отлично от нуля. На выходе РС будет напряжение, которое он «наинтегрировал», пока на его входе
существовала |
ошибка |
регулирования |
∆uс |
= uзсmax − uос |
> 0 , |
причем |
величина этого напряжения uзт = kотIс1 |
будет соответствовать величине |
|||||
статического |
тока Iс1 , создающего |
электромагнитный |
момент |
|||
электродвигателя, |
уравновешивающий |
момент |
нагрузки |
|||
Ma = kФнIс1 = Mс1 . |
Поэтому электродвигатель будет |
работать в |
||||
установившемся режиме в т. c характеристики на рис.5.40.
Работе на участке ограничения выходного напряжения РС соответствует абсолютно мягкая электромеханическая (механическая)
характеристика электродвигателя (участок a − h на рис.5.40).
Следовательно, двукратноинтегрирующая система регулирования скорости электродвигателя является астатической как по заданию, так и по возмущению.
186
Рассмотрим динамические свойства двукратноинтегрирующей системы регулирования скорости электродвигателя по задающему и возмущающему воздействиям.
Выполним моделирование реакции линейной системы регулирования (без ограничения выходного напряжения РС) с ПИ-РС на
скачкообразное задание uзсmax =10В. Для схемы модели системы
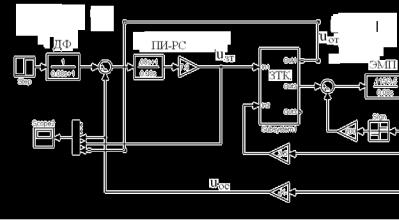
регулирования с П-РС добавим звено ПИ –РС и добавочный фильтр ДФ на входе РС, в результате чего схема модели примет вид, представленный на рис.5.41.
Рис.5.41. Схема модели двукратноинтегрирующей СУЭП
Сравнительная реакция однократно - интегрирующей и двукратно - интегрирующей систем регулирования скорости электродвигателя на
скачкообразное задание uзсmax =10В показана на рис.5.42.
Переходные процессы, соответствующие настройке системы регулирования на МО, представлены под номерами 1 и 2, а настройке на СО – под номерами 3 и 4. Кривые 1 и 3 представляют изменение во
времени напряжений обратных связей по току uот = f(t), а кривые 3 и 4 - изменение во времени напряжений обратных связей по скорости, увеличенных для наглядности в 10 раз 10* uос = f(t). Переходный процесс скорости (кривая 4) соответствует оптимальному переходному процессу
187
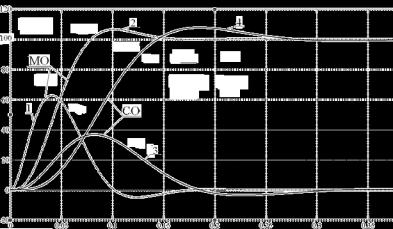
четвертого порядка с перерегулированием σ= 6,2% и временем нарастания tн = 14,4 Tµ (таблица 1).
Как видно из рис.5.42, двукратная система регулирования на управление реагирует медленнее, чем однократная, и имеет примерно то же перерегулирование по скорости.
Рис. 5.42. Реакция линейных систем регулирования скорости на скачкообразное задающее воздействие
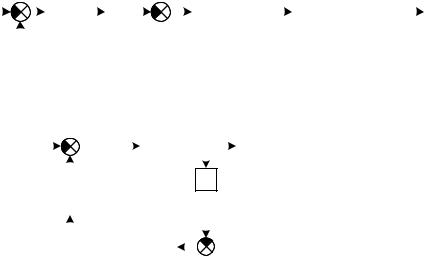
Определим передаточные функции замкнутой двукратно - интегрирующей системы регулирования скорости по возмущающему воздействию. Исходные структурные схемы СУЭП представлены на рис.5.43. Структурной схеме на рис.5.43,а (входное воздействие – тока статический, выходной параметр – якорный ток) соответствует передаточная функция, определяемая следующим выражением:
W (p) = |
Ia (p) |
= |
|
|
|
1 |
|
|
= |
|
Ic |
I (p) |
|
T p |
|
8Tµp |
|
kот (2Tµp(Tµp +1) |
+1) |
+1 |
|
|
c |
|
м |
|
|
|
|
|
||
|
|
|
Rэ /с (8Tµp +1) |
|
kосkрс |
|
|
|
||
|
8Tµp +1 |
|
|
= |
|
. |
(5.39) |
64Tµ4p4 + 64Tµ3p3 +32Tµ2p2 +8Tµp +1 |
|||
|
188 |
|
|

Передаточная функция для структурной схемы рис.5.43,б (входное воздействие – тока статический, выходной параметр – статическая просадка скорости) примет вид:
W'Ic (p) = − |
∆ωc (p) |
= − |
|
|
|
|
|
|
|
1 |
|
= |
||
|
T p |
|
8Tµp +1 |
|
|
|||||||||
|
I |
(p) |
|
|
+ |
kосkрс / kот |
||||||||
|
c |
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
R |
э |
/ с |
8T p |
(2T p(T p +1) +1) |
||||||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
µ |
|
µ |
µ |
|
|
|
= − |
R |
э |
8Tµ |
|
|
4Tµp(2Tµp(Tµp +1) +1) |
. (5.40) |
|||
с |
T |
|
(64T |
4p4 |
+ 64T3p3 |
+32T2p2 |
+8T p +1) |
|||
|
|
|
|
|||||||
|
|
|
м |
µ |
µ |
µ |
µ |
|
||
Как видно из (5.39) и (5.40) знаменатель передаточных функций соответствует оптимальному полиному четвертого порядка. После соответствующих математических преобразований можно получить следующие выражения для переходных процессов в двукратно - интегрирующей СУЭП при скачкообразном приложении возмущающего воздействия:
Ia (τ) = Ic (1−e−2τ((1+ 6τ)cos(2τ) + 2(τ−1)sin(2τ))), (5.41)
∆ωс (τ) = −Ic Rэ 8Tµ e−2τ((1,5 + τ)sin(2τ) − 2τcos(2τ)), (5.42)
с Tм
где τ = t /8Tµ - относительное время.
Из последних выражений видно, что после затухания переходных процессов установившееся значение статической просадки скорости
равно нулю ∆ωcуст =0, а установившееся значение якорного тока будет равно возмущающему воздействию, т.е. Iaуст = Iс .
Смоделируем переходные процессы в двукратно - интегрирующей системе регулирования скорости при скачкообразном приложении статического тока, равного номинальному току электродвигателя в соответствии с моделью на рис.5.41 и сравним их с соответствующими переходными процессами в однократно - интегрирующей системе
189
регулирования. Сравнительные переходные процессы представлены на рис.5.44.
|
|
|
|
|
|
|
ЭМП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РС |
|
uзт |
|
ЗТК |
Ia |
||||||||||
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uос ∆uс |
|
|
|
|
|
|
|
|
|
||||||||||||||
с |
|
|
|
|
Rэ / с |
ω |
|
|
|
8T p +1 |
|
|
1/ k |
от |
|
||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
kос |
|
|
|
|
|
|
|
|
|
µ |
|
|
kрс |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
Ia |
|
Тмр |
|
|
|
|
|
|
|
|
|
|
|
|
|
8Tµp |
|
|
|
2Tµp(Тµр +1) +1 |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЭМП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Iс |
|
|
|
|
|
|
|
|
|
|
|
|
Rэ / с |
−∆ωc |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тмр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
ЗТК |
|
|
Ia |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
1/ kот |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
2Tµp(Тµр +1) +1 |
|
|
РС |
|
|
|
uос |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
uзт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
k |
рс |
8Tµp +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8Tµp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆uс |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
б)
Рис.5.43. Структурные схемы двукратноинтегрирующей СУЭП по возмущению
Переходные процессы под номерами 1 и 2 соответствуют настройке системы регулирования на МО, а под номерами 3 и 4 – настройке на СО (1 и 3 – зависимости изменения во времени напряжений
обратной связи по току якоря uот = f(t), 2 и 4 – напряжений обратной связи по скорости 10* uос = f(t)).
Как видно из рис.5.44 принципиальное отличие реакции СУЭП, настроенной на СО, состоит в том, что после вызванного увеличением нагрузки на валу электродвигателя временного (динамического) падения скорости происходит восстановление скорости до заданной величины.
190