Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
перерегулированием 8,0% и временем нарастания 7,6 Tµ (таблица 1),
поэтому изменение во времени якорного тока при скачке возмущающего воздействия будет описываться следующей зависимостью:
|
|
|
|
|
|
|
|
Ia (τ) = Ic (1−e−2τ − |
2 |
|
e−τ sin( |
|
|
τ)), |
|
|
|
|
|
||||||||||||||||||||
|
|
|
3 |
(5.32) |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где τ = t / 4Tµ - относительное время. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
Iс |
|
|
|
|
|
ЭМП |
|
|
|
|
|
uос |
∆uс |
РС |
uзт |
|
|
|
|
|
|
ЗТК |
|
|
Ia |
|||||||||||||
|
|
|
|
|
Rэ / с |
ω |
|
|
|
|
|
|
|
|
1/ kот |
|
|
||||||||||||||||||||||
|
|
|
|
|
kос |
kрс |
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
Тмр |
|
|
|
|
|
|
|
|
|
|
|
|
|
2Tµp(Тµр +1) +1 |
|
|
|
|||||||||||||||
|
|
|
Ia |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Iс |
|
|
|
|
|
|
|
|
|
|
ЭМП |
−∆ωc |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rэ / с |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тмр |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
ЗТК |
|
|
|
Ia |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
1/ kот |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
2Tµp(Тµр +1) +1 |
|
|
uзт |
|
РС |
|
|
u |
ос |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kрс |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆uс |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
б)
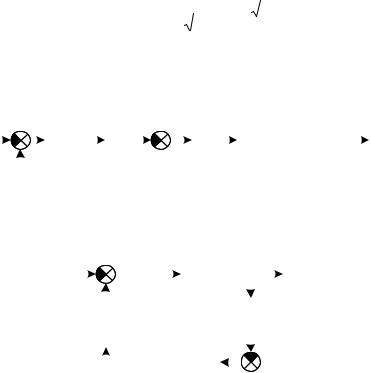
Рис.5.34. Структурные схемы однократноинтегрирующей СУЭП по возмущению
Передаточная функция для схемы рис.5.34,б будет определяться следующей зависимостью:
176

W'Ic (p) = − |
∆ωc (p) |
= − |
|
|
|
|
|
1 |
|
= |
|||
|
T p |
|
kосkрс / kот |
|
|||||||||
|
I |
|
(p) |
|
|
+ |
|
|
|
||||
|
|
c |
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
R |
э |
/ с |
(2T p(T p +1) |
+1) |
|
|
||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
µ µ |
|
|
|
|
= − |
R |
э |
4Tµ |
|
|
|
(2Tµp(Tµp +1) +1) |
|
|
|
= |
|
||||||
с |
T |
|
4T p(2T p(T p +1) |
+1) |
+1 |
|
||||||||||||
|
|
|
|
|
||||||||||||||
|
|
|
м |
|
|
µ |
|
µ |
|
µ |
|
|
|
|
|
|
|
(5.33) |
|
R |
|
4Tµ |
|
|
1 |
|
2Tµ |
|
|
2Tµ2 |
|
|
|||||
= − |
э |
( |
+ |
p + |
|
p2 ), |
|
|||||||||||
с |
T |
Q |
(p) |
Q |
(p) |
|
Q |
(p) |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
м |
|
|
3 |
|
|
3 |
|
|
3 |
|
|
|
|
|
|
где Q3 (p) - полином 3-го порядка системы, настроенной на МО (таблица
1).
В уравнении (5.33) выражению в скобках будут соответствовать следующие переходные функции: для первой составляющей 1/ Q3 (p) - переходная функция системы третьего порядка, настроенной на МО,
h3 |
(τ) , |
для второй составляющей 2Tµp / Q3 (p) - первая производная |
h3' |
(τ) |
(т.к. p = d / dt - есть оператор дифференцирования), для третьей |
составляющей 2Tµ2p2 / Q3 (p) - вторая производная h3'' (τ) .
Если выполнить данные математические преобразования, то можно получить следующее выражение для изменения во времени скорости (статической просадки по скорости) при скачкообразном приложении возмущающего воздействия:
∆ω (τ) = −I |
|
R |
э |
4Tµ |
(h |
|
(τ) + |
1 |
h' |
(τ) |
+ |
1 |
h'' |
(τ)) = |
||||||||||
|
|
|
T |
|
2 |
8 |
||||||||||||||||||
с |
|
c |
с |
|
|
|
3 |
|
|
|
3 |
|
|
|
3 |
|
|
|
|
|||||
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.34) |
|||
|
4Tµ |
|
|
|
|
e−2τ |
|
e−τ |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
(1 |
|
|
|
(sin( |
|
3τ) + |
|
3 cos( 3τ)), |
|||||||||||||||
= −∆ω |
|
|
− |
|
− |
|
|
|
|
|
||||||||||||||
Tм |
2 |
|
|
|
||||||||||||||||||||
раз |
|
|
|
|
|
|
2 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
где τ = t / 4Tµ - относительное время.
На рис.5.35 показана реакция системы регулирования скорости (модель на рис.5.30) Ia , ∆ωc =f(t) на скачкообразное задание
177
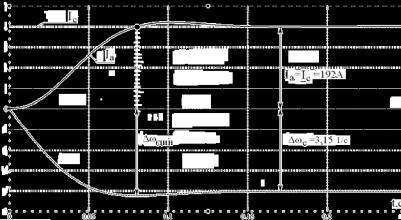
статического тока Ic =192А при uзс =0. Пока ток электродвигателя меньше тока статического ( Ia < Ic ) просадка по скорости уменьшается и при Ia = Ic ( tн = 7,6Tµ ) достигается максимальная просадка скорости
∆ωдин ≈ ∆ωс , перерегулирование якорного тока составляет 8%.
Вследствие малого перерегулирования полного восстановления скорости не происходит, в результате чего имеет место статическая просадка
скорости, равная ∆ω = −I |
R |
э |
4Tµ |
= −192 |
0,115 0,04 |
= −3,15 с-1. |
|
T |
3,5 0,08 |
||||
c |
c с |
|
|
|||
|
|
|
м |
|
|
|
Общее время реакции электропривода составляет примерно 10 Tµ .
Рис.5.35. Реакция однократной СУЭП на возмущающее воздействие
В результате рассмотрения однократноинтегрирующей СУЭП можно сделать следующие выводы:
•однократноинтегрирующая система регулирования является астатической по заданию и статической по возмущению;
•динамические характеристики системы регулирования зависят от некомпенсируемой постоянной времени Tµ ;
•статическая просадка скорости зависит от соотношения постоянных времени 4Tµ / Tм .
178
Контрольные вопросы:
1.Какой режим пуска носит название «пуск под отсечку»?
2.Поясните переходные процессы пуска под отсечку на холостом ходу и под нагрузкой (в чем их отличие и почему).
3.Как получается уравнение переходного процесса тока якоря при набросе нагрузки?
4.Как получается уравнение переходного процесса скорости при набросе нагрузки?
5.3.Настройка контура регулирования скорости в двукратноинтегрирующей СУЭП
Втех случаях, когда статическая просадка скорости не удовлетворяет технологическим требованиям к электроприводу, применяют двукратноинтегрирующую систему регулирования, которая получается дополнением однократной системы регулирования скорости
еще одним контуром регулирования скорости [1,2,7,8].
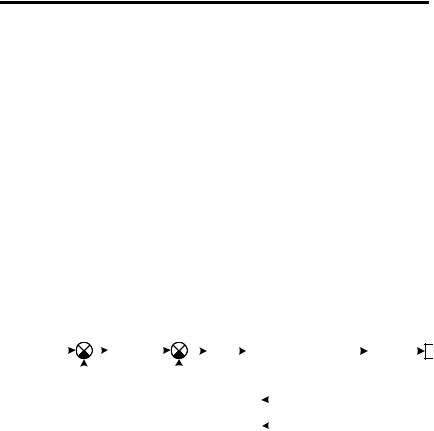
Структурная схема двукратной системы регулирования скорости представлена на рис.5.36, где показан дополнительный регулятор скорости РС2 с дополнительной обратной связью по скорости.
uзс |
|
|
|
|
РС2 |
|
|
|
|
|
РС1 |
uзт |
|
|
|
|
|
|
|
Ia |
|
ω |
||||
|
|
|
|
1/ kот |
|
|
Rэ / с |
|||||||||||||||||||
|
|
|
|
Wрс2 (p) |
|
|
|
|
|
kрс |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2Tµp(Тµр +1) |
+1 |
|
|
Тмр |
|
|
1 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
uос |
|
|
uос |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
i = |
2 |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i = 3 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис.5.36. Структурная схема двукратной системы регулирования скорости
Передаточная функция РС2 определяется в соответствии с (5.11) для настройки на МО третьего контура регулирования:
W |
(p) = |
1 |
kос |
= |
1 |
. |
(5.35) |
|
|
8T p |
|||||||
РС2 |
|
23 T p k |
ос |
|
|
|
||
|
|
µ |
|
|
µ |
|
|
|
|
179 |
|
|
|
|
|
|
|
Таким образом, получили интегрирующий РС, который сводит ошибку регулирования скорости ∆uс = uзс − uос к нулю, поэтому статическая просадка скорости в данной системе регулирования также будет равна нулю ∆ωс = 0 .
Преобразуем исходную структурную схему рис.5.36, для чего перенесем обратную связь по скорости со входа РС1 на вход РС2 (рис.5.37,а), после чего параллельные обратные связи по скорости заменим одной обратной связью (рис.5.37,б). Затем форсирующее звено
8Tµp +1 из цепи обратной связи по скорости перенесем в прямой канал регулирования в передаточную функцию общего РС (рис.5.37,в).
180