Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
|
|
|
uзс |
|
|
|
РС2 |
РС1 |
uзт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ia |
|
|
|
|
|
|
|
ω |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/ kот |
|
|
|
Rэ / с |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
kрс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8Tµp |
|
|
|
|
|
|
|
|
|
|
|
2Tµp(Тµр +1) +1 |
|
|
|
|
|
Тмр |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
uос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8Tµp |
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
uос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
uзс |
|
|
|
|
|
|
|
РС2 |
|
|
РС1 |
uзт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ia |
|
|
|
|
|
ω |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1/ kот |
|
|
|
|
|
|
Rэ / с |
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kрс |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8Tµp |
|
|
|
|
|
|
|
|
|
|
2Tµp(Тµр +1) +1 |
|
|
|
|
Тмр |
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
uос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8Tµp +1 |
|
|
|
|
|
kос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uзт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ia |
|
|
|
|
|
|
ω |
|
||||||||||
|
|
|
|
|
uзс |
|
|
|
|
|
|
|
8T p +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1/ kот |
|
|
|
|
|
|
|
Rэ |
/ с |
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
µ |
|
|
|
|
|
kрс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
uос |
8Tµp |
|
|
|
|
|
|
|
|
|
|
|
|
2Tµp(Тµр +1) +1 |
|
|
|
|
Тмр |
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
ДФ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uзт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ia |
|
|
|
|
|
||||||||||
uз |
|
|
|
1 |
|
|
|
|
|
uзс |
|
|
|
|
|
|
|
8T p +1 |
|
|
|
|
|
|
1/ kот |
|
|
|
|
|
|
Rэ / с |
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
µ |
|
|
|
|
|
|
|
|
kрс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
8Tµp +1 |
|
|
|
|
|
|
|
|
uос |
|
|
8Tµp |
|
|
|
|
2Tµp(Тµр +1) +1 |
|
|
|
Тмр |
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
г) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Рис.5.37. Преобразования структурной схемы двукратноинтегрирующей системы регулирования скорости
В результате выполненных преобразований |
получается |
следующая передаточная функция общего РС: |
|
181 |
|
W |
(p) = |
8Tµp +1 |
k |
|
= k |
|
+ |
k |
РС |
= k |
|
+ |
1 |
|
, (5.36) |
|
8T p |
|
|
|
8T p |
|
T |
p |
|||||||||
РС |
|
|
РС |
|
РС |
|
|
РС |
|
|
||||||
|
|
µ |
|
|
|
|
|
|
|
µ |
|
|
|
РС |
|
|
где kРС - коэффициент передачи П-РС (5.26); |
|
|
|
|
||||||||||||
TРС = 8Tµ / kРС |
- постоянная времени интегрирования РС. |
|||||||||||||||
В итоге получился один регулятор скорости, имеющий ПИ структуру. Поскольку в передаточной функции РС в числителе появилось
форсирующее звено 8Tµp +1, то в этом случае при прохождении
управляющего сигнала задания скорости uзс через РС, возрастает
перерегулирование при отработке заданного значения якорного тока. Для
снижения величины перерегулирования якорного тока на входе РС со стороны задания включают дополнительный фильтр ДФ с передаточной функцией обратной по отношению к передаточной
функции форсирующего звена: WДФ (p) =1/(8Tµp +1) (рис.5.37,г).
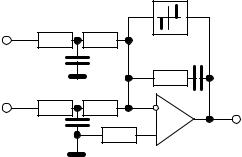
Принципиальная электрическая схема ПИ – РС, реализованного на операционном усилителе, показана на рис.5.38, на которой БОэто блок ограничения выходного напряжения РС (напряжения задания величины якорного тока) для ограничения якорного тока электродвигателя на заданном уровне.
Передаточные функции РС по цепи задания uзс и цепи обратной
связи по скорости uос электродвигателя для схемы РС, представленной на рис.5.38, будут иметь вид:
W |
(p) = uзт (p) = |
|
R6C2p +1 |
|
||
|
|
|
||||
РС |
|
uзс (p) |
|
2R4C2p(0,5R4C3p +1) |
|
|
|
|
|
(5.37) |
|||
|
|
uзт (p) |
|
|
R6C2p +1 |
|
W |
(p) = |
= |
|
|
||
|
|
|
||||
РС |
|
uос (p) |
|
2R5C2p(0,5R5C4p +1) |
|
|
|
|
|
|
|||
182
|
R4 |
R4 |
БО |
+uзс |
|
||
|
|
|
|
|
C3 |
|
R6 C2 |
- uос |
R5 |
R5 |
-uзт |
|
C4 |
|
|
|
|
|
Рис.5.38. Принципиальная электрическая схема ПИ РС
Для обеспечения одинакового коэффициента передачи РС по входам задания и обратной связи по скорости необходимо выполнить
равенство сопротивлений резисторов R4 |
= R5 . |
Параметры РС |
|||||
рассчитываются с учетом (5.36) |
и (5.37) |
на основании |
равенств: |
||||
R6С2 = 8Tµ , |
2R4С2 |
= 8Tµ / kРС = TРС . Задавшись величиной емкости |
|||||
конденсатора |
C2 можно рассчитать значение величины сопротивлений |
||||||
R6 и R4 |
= R5 . По входу задания |
uзс реализован дополнительный |
|||||
фильтр, |
параметры |
которого |
определяются |
из |
равенства: |
||
0,5R4С3 = 8Tµ , а в цепи обратной связи по ск |
орости |
uос |
реализован |
||||
фильтр для фильтрации помех в напряжении тахогенератора, постоянная времени которого Tф = 0,5R5С4 находится в пределах 2…5 мс и подбирается при наладке электропривода.
Структурная схема системы регулирования с объединенным РС позволяет пояснить происхождение таких терминов, как «двукратно-
интегрирующая система регулирования» и «симметричный оптимум». Первый термин связан со структурной схемой разомкнутой СУЭП. Передаточная функция разомкнутой системы регулирования (без учета дополнительного фильтра на входе РС и подстановке значения
kрс из (5.26) получается из структурной схемы |
рис.5.37,г при |
размыкании цепи обратной связи по скорости |
и определяется |
следующим выражением: |
|
183 |
|
W |
(p) = |
u |
ос |
(p) |
= |
|
8Tµp +1 1 |
|
|
1 |
|
≈ |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
u |
(p) |
|
|
8T p 4T p 2T2p2 |
+ 2T p +1 |
|||||||||||||||
|
разс |
|
|
зс |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
µ |
µ |
µ |
µ |
|
(5.38) |
||||
|
8Tµp +1 |
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||||
≈ |
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
8Tµp 4Tµp 2Tµp +1 |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||
Как видно из (5.38) в передаточную функцию входят форсирующее звено первого порядка, оптимальное звено второго
порядка и два интегрирующих звена с постоянными интегрирования 4Tµ
и8Tµ . Отсюда происходит название СУЭП – двукратно-
интегрирующая (ПИ-РС и ПИ-РТ).
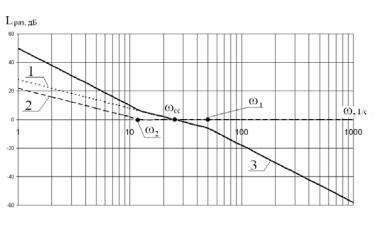
Из передаточной функции (5.38) видно, что она получилась дополнением передаточной функции ПИ регулятора скорости к передаточной функции разомкнутой системы регулирования с П регулятором скорости. Поэтому ЛАЧХ разомкнутого контура регулирования скорости получается суммированием ЛАЧХ ПИ – РС и ЛАЧХ разомкнутого контура регулирования скорости с П – РС. На рис.5.39 показано построение идеализированной ЛАЧХ (замкнутый токовый контур – апериодическое звено) разомкнутого конура регулирования скорости в двукратно - интегрирующей СУЭП.
Рис.5.39. ЛАЧХ разомкнутого контура регулирования скорости
184
На рис.5.39 показана ЛАЧХ разомкнутого контура регулирования |
|||||||||
скорости с П – РС (номер 1) имеющая наклон -20 дБ/дек на частоте среза |
|||||||||
контура регулирования скорости |
ωСС =1 4Tµ |
и -40 дБ/дек после |
|||||||
частоты сопряжения ω1 =1 2Tµ . Под номером 2 |
представлена ЛАЧХ |
||||||||
ПИ - РС с наклоном -20 дБ/дек до частоты сопряжения ω2 |
=1 8Tµ и |
||||||||
наклоном 0 дБ/дек после частоты сопряжения. Под номером 3 показана |
|||||||||
результирующая ЛАЧХ с наклонами «-40» - «-20» - «-40» дБ/дек, которая |
|||||||||
получилась симметричной |
относительно частоты |
среза ωСС =1 4Tµ . |
|||||||
Отсюда происходит название варианта настройки контура |
|||||||||
регулирования: настройка на симметричный оптимум (СО). |
|
||||||||
Преобразования структурной схемы на рис.5.36 и 5.37 показали, |
|||||||||
что настройка на МО для одной и той же регул |
|
ируемой координаты |
|||||||
(скорости) дважды привело к симметричному оптимуму. |
|
||||||||
Так как при настройке на СО регулятор скорости имеет |
|||||||||
интегральную |
составляющую, |
то |
ошибка |
регулирования |
скорости |
||||
∆uс = uзс − uос |
всегда |
будет |
сведена |
к |
нулю, |
поэтому |
|||
электромеханические (механические) характеристики электропривода в |
|||||||||
двукратноинтегрирующей системе регулирования будут абсолютно |
|||||||||
жесткими (рис.5.40). |
|
|
|
|
|
|
|
||
ω0max |
ω |
|
|
|
|
|
|
|
|
d |
|
с |
|
b |
a |
|
|
|
|
|
|
|
|
|
|
|
|
uзс = uзсmax |
|
0.5ω0max |
|
|
|
|
|
|
|
uзс = 0,5uзсmax |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
Ic1(Мс1) |
Ic2 (Мс2 ) |
|
h |
Ia (M) |
|
|
|
|
|
|
uзс = 0 |
|
Imax (Мmax ) |
|
||
|
|
|
|
|
|
|
|
||
Рис.5.40. Электромеханические (механические) характеристики |
|||||||||
электродвигателя в двукратноинтегрирующей СУЭП |
|||||||||
185