Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
14.Как определяется полярность напряжений в схеме регулирования на рис.5.29?
15.Чему равна передаточная функция разомкнутого контура регулирования скорости?
5.2.1. Пуск под отсечку в однократной СУЭП
Рассмотрим реальные переходные процессы в однократноинтегрирующей системе, полученные с учетом ограничения тока якоря
на уровне Ia = 2,5* Iн , для чего выходное напряжение РС ограничено на уровне uзтmax = 10В. Переходные процессы при скачкообразном задании на входе РС максимального входного напряжения uзсmax =10В
представлены на |
рис.5.32 для режима холостого хода ( Iс =0) и на |
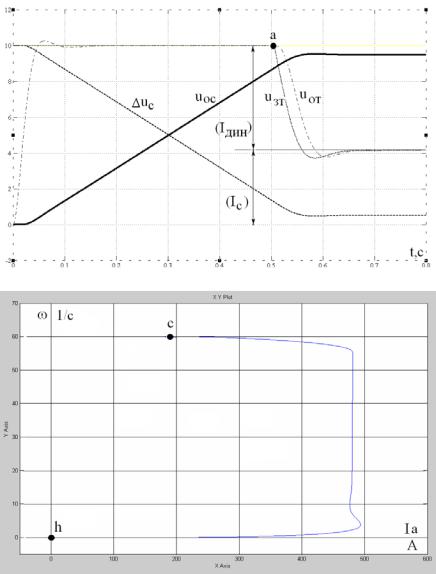
рис.5.33 для пуска под нагрузкой ( Iс = Iс1 ).
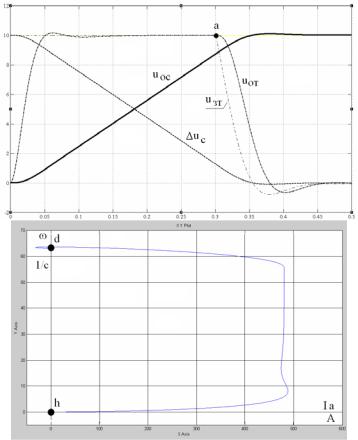
На рис.5.32,а показаны переходные процессы напряжений: ошибки по скорости на входе РС ∆uс ; задания якорного тока на выходе РС uзт ,
обратной связи по току uот и скорости uос ; а на рис.5.32,б показана фазовая траектория ω = f (Ia ) при пуске на холостом ходу.
Для анализа переходных процессов воспользуемся характеристикой РС (рис.5.26), электромеханической характеристикой электродвигателя (рис.5.27) и схемой СУЭП (рис.5.29). При подаче на
вход РС скачкообразного напряжения uзсmax =10В на выходе РС получается напряжение максимального задания тока uзтmax =10В, что
соответствует т. h на характеристиках рис.5.26 и 5.27. На входе РТ появляется скачком напряжение uзтmax =10В и контур регулирования
якорного тока отрабатывает оптимальный переходный процесс, соответствующий первому контуру, настроенному на МО
( tн = 4,7 * Tµ , σ = 4,3% ). Т.к. на валу электродвигателя момент нагрузки равен нулю, то пуск электродвигателя будет происходить с динамическим моментом, равным Мдин = kФнImax = 2,5Мн .
Поэтому электродвигатель будет разгоняться с максимальным ускорением. По мере разгона электродвигателя его скорость увеличивается и ошибка регулирования скорости на входе РС
уменьшается ∆uс = uзсmax − kосω, однако выходное напряжение РС
171
остается неизменным и равным uзтmax =10В (т. на
характеристике рис.5.26), поэтому ток якоря остается неизменным и максимальным.
Рис.5.32. Переходные процессы при пуске на холостом ходу При ошибке регулирования ∆uсa = uзтmax / kрс (т. a на характеристиках рис.5.26, 5.27 и 5.32,а) РС выходит из ограничения и при дальнейшем уменьшении ошибки ∆uс выходное напряжение РС uзт начинает уменьшаться (т. на характеристиках рис.5.26 и 5.27) в результате чего начинает уменьшаться и ток якорной цепи (напряжение
172
рис.5.32,а). Когда действительное значение скорости электродвигателя станет равно заданному, ошибка регулирования на входе РС станет
равной |
нулю |
∆uс = uзсmax − kосω0max = 0 , |
напряжение |
задания |
|
якорного тока также станет равно нулю |
uзт = 0 , следовательно, и ток |
||||
якорной |
цепи |
уменьшится до нуля uот = 0 |
(т. d на характеристиках |
||
рис.5.26 |
и 5.27). Электродвигатель |
будет |
работать на |
заданной |
|
установившейся скорости ω0max с нулевым якорным током.
Пуск электродвигателя, когда РС заходит в режим ограничения выходного напряжения, называют пуском под «отсечку».
На |
рис.5.32,б |
представлена |
фазовая |
траектория |
пуска |
под |
«отсечку» |
ω = f (Ia ) , соответствующая |
переходным |
процессам |
|||
рис.5.32,а (переход из т. h в т. d ). |
|
|
|
|
||
На |
рис.5.33 |
представлены |
переходные процессы |
пуска |
под |
|
«отсечку» с моментом нагрузки на валу электродвигателя. |
|
|
||||
Как видно из рис.5.33,а при пуске под нагрузкой токовый контур также отрабатывает оптимальный переходный процесс с максимальным током якорной цепи, однако в отличие от рис.5.32,а электродвигатель начинает вращаться, когда ток якоря (момент) становится больше тока (момента) сопротивления. Далее пуск электродвигателя происходит аналогично пуску на холостом ходу (РС находится в ограничении), однако, динамический момент (ток) электродвигателя при пуске под нагрузкой будет определяться разностью момента, развиваемого
электродвигателем |
и |
|
момента |
сопротивления: Мдин = kФн (Imax − Ic1) < 2,5Мн . |
Поэтому |
пуск |
|
электродвигателя будет происходить с меньшим ускорением, чем в случае пуска на холостом ходу.
При выходе РС из ограничения (т a на характеристиках), выходное напряжение РС uзт начинает уменьшаться, следовательно, начинает
уменьшаться и ток якоря электродвигателя ( uзт и uот на рис.5.33,а). Так
как на валу электродвигателя присутствует момент нагрузки Мс1 , то электродвигатель разгонится до скорости, соответствующей этому моменту ωс1 < ω0max , поэтому на входе РС будет ошибка регулирования
173
а)
б)
Рис.5.33. Переходные процессы при пуске под нагрузкой
174
скорости, отличная от нуля ∆uсc = uзсmax − kосωс1 > 0 и на выходе РС будет сформировано напряжение задания якорного тока, соответствующее величине момента нагрузки на валу электродвигателя
uзт = kрс∆ucc = kотIc1 . Электродвигатель будет работать в установившемся режиме (т. c на характеристиках рис.5.26 и 5.27) со скоростью ωс1 и током Ic1 (моментом Мс1 ).
На рис.5.33,б представлена фазовая траектория ω = f (Ia ) ,
соответствующая переходным процессам рис.5.33,а (переход из т. h в
т. c ).
При пуске под «отсечку» РС находится в ограничении, поэтому обратная связь по скорости не влияет на работу РС, говорят, что обратная связь по скорости разомкнута, при этом на валу электродвигателя формируется максимальный момент, поэтому ускорение при разгоне электропривода будет зависеть от величины момента нагрузки на валу электродвигателя и будет разным при разных моментах нагрузки, что является недостатком такого способа пуска.
5.2.2. Реакция однократной СУЭП на возмущающее воздействие
Рассмотрим реакцию однократноинтегрирующей СУЭП на возмущающее воздействие. Исходные структурные схемы представлены на рис.5.34, где входной координатой является возмущающее
воздействие – ток статический Ic , а выходной координатой – ток якоря Ia (рис.5.34,а) и статическая просадка скорости ∆ωс (рис.5.34,б).
Для первой структурной схемы передаточная функция замкнутого контура регулирования определится:
W |
(p) = |
Ia (p) |
= |
|
|
1 |
|
= |
|||
|
Ic |
|
I (p) |
|
|
T p |
|
kот (2Tµp(Tµp +1) +1) |
+1 |
||
|
|
|
c |
|
|
м |
|
|
|
||
|
|
|
|
|
|
Rэ / с |
|
|
kосkрс |
(5.31) |
|
= |
|
|
|
1 |
|
|
|
|
. |
|
|
4Tµp(2Tµp(Tµp +1) +1) +1 |
|
|
|||||||||
Передаточной функции (5.31) соответствует переходная функция |
|||||||||||
системы |
третьего |
порядка, |
|
настроенной на |
МО, h3 (τ) с |
||||||
|
|
|
|
|
|
|
175 |
|
|
|
|