Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
якорного тока максимально допустимой величиной, необходимо принимать меры для ограничения выходного напряжения РС на
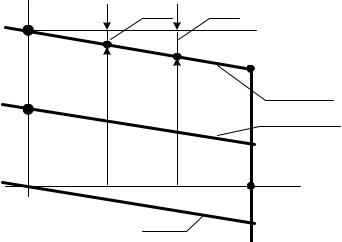
уровне uвыхРСmax = uзтmax . Поэтому характеристика вход – выход РС должна иметь вид, представленный на рис.5.26,
+uзтmax |
uвыхРС |
= uзт |
h2 h1 h |
|
|
a h3 |
|||
|
b |
|
зсmax |
|
|
с |
|
= u |
|
|
|
c |
||
|
|
∆u |
||
d |
|
|
||
|
|
|
||
0 |
cс cb |
ca |
∆uc = uзс −uос |
|
∆u ∆u ∆u |
||||
|
|
|||
|
−uзтmax |
|
|
|
Рис.5.26. Характеристика регулятора скорости |
||||
где ∆uс - ошибка регулирования на входе РС (разность между
напряжениями задания скорости uзс и обратной связи по скорости uос ).
На характеристике РС точка а соответствует переходу с линейного участка характеристики РС в режим ограничения (насыщения).
Для статического режима работы (при токе якоря равном статическому Ia =Iс ) можно записать следующее уравнение для ошибки регулирования якорного тока:
∆uт = uзт − uот = uзт − kотIс = 0 . |
(5.27) |
161

А так как напряжение задания величины якорного тока uзт
является выходным напряжением РС, то уравнение (5.27) можно представить в следующем виде:
(uзс − uос )kрс − kотIс = (uзс − kосω)kрс − kотIс = 0 . (5.28)
Если в выражение (5.28) подставить значение коэффициента передачи kрс из (5.26) и решить уравнение относительно скорости
вращения электродвигателя ω, то получим выражение электромеханической ω = f(Ia) (механической ω = f(М)) характеристики электродвигателя в системе регулирования с П – РС и ПИ – РТ:
ω = |
|
|
u |
зс |
|
− I |
с |
R |
э |
4Tµ |
|
= |
|
u |
зс |
|
− ∆ω |
|
4Tµ |
= ω |
− ∆ω , |
(5.29) |
|||||||||
|
|
|
k |
ос |
|
|
|
c |
|
T |
|
|
k |
ос |
раз T |
0з |
|
сз |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
м |
|
|
|
|
|||||||
где ω |
= |
uзс |
- |
|
скорость |
идеального |
холостого |
хода |
в |
СУЭП |
|||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||
0з |
|
|
|
kос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
подчиненного регулирования с П – РС и ПИ – РТ, с-1; |
|
|
|
||||||||||||||||||||||||||||
|
∆ω |
раз |
= I |
с |
|
Rэ |
|
= М |
с |
|
Rэ |
- статическая просадка скорости в |
|||||||||||||||||||
|
|
|
с |
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с2 |
|
|
|
|
|
|
|||||||||
разомкнутой системе регулирования, с-1; |
|
|
|
|
|
|
|||||||||||||||||||||||||
|
∆ω |
|
|
= ∆ω |
|
|
4Tµ |
|
|
|
- статическая |
просадка |
скорости в |
||||||||||||||||||
|
|
|
|
|
|
сз |
|
|
|
|
|
раз |
|
|
|
|
Tм |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
замкнутой системе регулирования с П – РС и ПИ - РТ, с-1. |
|
|
|||||||||||||||||||||||||||||
Как |
|
видно |
из |
(5.29) |
|
величина напряжения на |
входе |
РС uзс |
|||||||||||||||||||||||
(управляющее воздействие) задает только скорость идеального холостого
хода |
электродвигателя |
ω |
= |
uзс |
, |
(единственную |
точку |
|
|||||||
|
|
0з |
|
kос |
|
|
|
|
|
|
|
|
|
||
электромеханической характеристики), поэтому в режиме идеального холостого хода (Ic=0) СУЭП всегда будет отрабатывать заданное значение скорости идеального холостого хода с нулевой ошибкой, т.е. система с П – РС и ПИ – РТ является астатической по заданию (по управляющей величине). При приложении возмущающего воздействия (момента нагрузки на вал электродвигателя) скорость вращения
162
электродвигателя будет отлична от скорости идеального холостого хода ω0з на величину статической просадки скорости ∆ωсз , пропорционально зависящей от величины момента Мс (тока Ic) нагрузки, т.е. отработка заданной величиной uзс скорости вращения будет
осуществляться с ошибкой. Поэтому система с П – РС и ПИ – РТ является статической по возмущению. Система подчиненного регулирования с П – РС и ПИ – РТ получила название однократно-
интегрирующей системы регулирования (или просто однократной).
На рис.5.27 представлены электромеханические (механические) характеристики электродвигателя в однократноинтегрирующей системе регулирования для различных значений величины напряжения задания
скорости на |
входе РС |
uзс = 0 , uзс = 0.5uзсmax и uзс = uзсmax , |
||
задающих |
скорости |
идеального |
холостого |
хода |
ω0з = 0 , ω0з = 0.5ω0 max |
и ω0з = ω0 max , |
соответственно, |
с учетом |
|
ограничения максимальной величины якорного тока.
Рассмотрим работу данной системы регулирования в статических режимах на примере характеристик рис.5.26 и рис.5.27.
Предположим, что на вход РС в режиме идеального холостого хода (Мс=0 или Ic=0) подано максимальное значение напряжения задания
скорости |
uзс = uзсmax , поэтому электродвигатель будет |
вращаться с |
||
заданной |
максимальной |
скоростью ω = ω0з = ω0max |
в |
точке |
d характеристики рис.5.27 при моменте (токе) равном нулю. Так как скорость вращения электродвигателя равна заданной, т.е. ω = ω0max , поэтому напряжение в цепи обратной связи по скорости вращения будет
равно uос = kосω0 max = uосmax = uзсmax |
и, следовательно, ошибка по |
||
скорости |
на |
входе РС будет равна нулю: ∆uс = uзсmax − uосmax = 0 . |
|
Поэтому |
и |
выходное напряжение |
РС будет равно нулю: |
uвыхРС = uзт = kрс∆uс = 0 , а так как это напряжение задает
необходимую величину якорного тока, то контур регулирования якорного тока будет поддерживать нулевой заданный ток.
163
ω0max |
ω |
∆ωсз1 |
∆ωсз 2 |
|
|
|
|
d |
|
|
|
|
|||
|
|
|
|
|
|
||
|
|
|
с |
b |
a |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
0.5ω |
|
|
|
|
|
|
uзс = uзсmax |
0max |
|
|
|
|
|
|
|
|
|
|
|
|
|
uзс = 0.5uзсmax |
|
0 |
|
|
Ic1(Мс1) |
Ic2 (Мс2 ) |
|
h |
Ia (M) |
|
|
|
uзс = 0 |
|
Imax (Мmax ) |
||
Рис.5.27. Электромеханические (механические) характеристики в |
|||||||
|
|
однократной системе регулирования |
|
|
|||
Если на валу электродвигателя появится момент нагрузки (Мс1 на рис.5.27), то под действием отрицательного динамического момента (Мдин =0-Мс1) скорость вращения электродвигателя начнет снижаться. В этом случае на входе РС возникает отличная от нуля ошибка
регулирования ∆uс = uзсmax − uос = uзсmax − kосω > 0 , соответственно увеличивается и выходное напряжение РС, т.е. увеличивается
напряжение задания величины якорного тока uзт = kрс∆uс > 0 , а,
следовательно, и ток якоря (момент) электродвигателя. Снижение скорости электродвигателя будет происходить до тех пор, пока динамический момент на валу электродвигателя Мдин =М - Мс1 не станет равен нулю, т.е. пока момент, развиваемый электродвигателем, не станет равен моменту сопротивления на валу (М=Мс1 или Ia=Ic1). Это условие будет выполнено в т. с механической характеристики рис.5.27 при этом на входе РС будет действовать ошибка регулирования скорости,
пропорциональная величине статической просадки скорости ∆ωсз1 при
величине |
якорного |
тока |
Ia=Ic1: |
∆uсс = uзсmax − kосω = kос (ω0 max −ω) = kос∆ωсз1 . |
Этой входной |
||
|
|
164 |
|
ошибке |
будет |
соответствовать |
выходное |
напряжение |
РС, равное: |
||||||||||||||||||||||||
u |
|
= k |
|
∆u |
|
= k |
|
k |
|
∆ω |
|
= |
T |
|
с |
k |
|
k |
|
I |
R |
|
4Tµ |
|
= k |
|
I |
|
|
зт |
рс |
cc |
рс |
ос |
сз1 |
м |
|
|
|
|
от |
ос |
с1 с |
э |
|
|
от |
c1 |
|||||||||||
4T |
|
R |
э |
k |
T |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
ос |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
µ |
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
||
(т. с на характеристике регулятора скорости рис.5.26), поэтому регулятор тока якоря будет поддерживать в якорной цепи заданное значение тока
якоря uзт = kотIc1 , т.е. стабилизировать ток на уровне Ia=Ic1.
Электродвигатель будет работать в установившемся режиме в т с механической характеристики рис.5.27.
При возрастании момента нагрузки до величины Мс2 произойдет снижение скорости, увеличится статическая просадка скорости до
величины ∆ωсз2 , соответственно, увеличится выходное напряжение РС, увеличится ток в якорной цепи до величины Ia=Ic2 и электродвигатель
перейдет в новую точку установившегося режима работы (т. b на механической характеристике рис.5.27 и характеристике РС на рис.5.26).
Если момент нагрузки на валу электродвигателя превысит величину Мmax, то скорость электродвигателя будет снижаться, ошибка на входе РС будет увеличиваться, следовательно, будет увеличиваться и выходное напряжение РС и ток якоря, до тех пор, пока РС работает на
линейном участке своей характеристики от т. d до т. a рис.5.26. В т. a характеристики РС происходит ограничение выходного напряжения
РС на уровне uзтmax , поэтому дальнейшее увеличение якорного тока
происходить не будет и РТ будет поддерживать в якорной цепи ток Ia = Imax. Под действием момента нагрузки, превышающего максимальный момент электродвигателя, электродвигатель остановится, при этом
uос = 0, на входе б удет максимальная ошибка регулирования скорости ∆uс = uзсmax электродвигатель будет работать в установившемся
режиме работы (т. h на механической характеристике рис.5.27 и т. h на характеристике РС рис.5.26), развивая максимальный момент в неподвижном состоянии.
Рассмотрим реализацию РС на операционном усилителе. Принципиальная электрическая схема РС на аналоговом операционном усилителе показана на рис.5.28. На вход РС (например, для работы в направлении «вперед») подаются напряжение задания скорости
uзс положительной полярности и напряжение обратной связи по
скорости uос отрицательной полярности для обеспечения отрицательной обратной связи, при такой полярности входных напряжений на выходе
165