Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
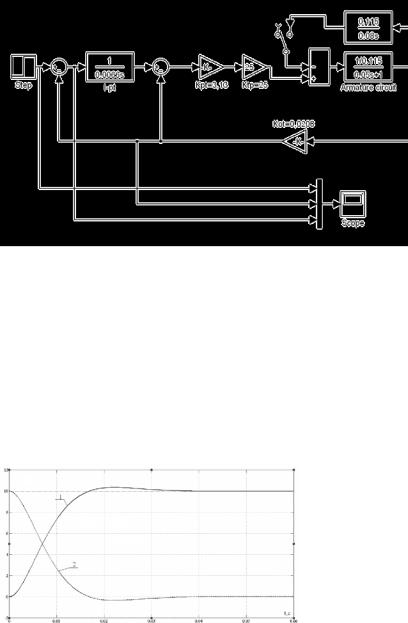
Рис.5.23. Схема модели двухконтурного регулирования якорного тока
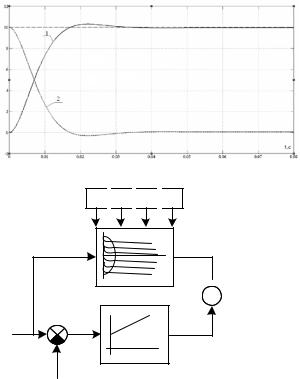
На рис.5.24,а,б представлены переходные процессы реакции контура регулирования якорного тока на скачкообразное задание
максимального тока uзтmax = 10В: изменение напряжения обратной связи по току uот =f(t) (кривая 1) и ошибки регулирования якорного тока
∆uт =f(t) (кривая 2) без учета внутренней обратной связи по ЭДС
электродвигателя (рис.5.24,а) и с учетом влияния ЭДС электродвигателя
(рис.5.24,б).
а)
156
б)
Ra
 La
La 
 Ud
Ud
 Ea
Ea
предуправление |
Uу1 |
|

 Uу
Uу
uзт |
∆uт |
Uу2 |
|
uот |
|
в)
Рис.5.24. Переходные процессы двухконтурного регулирования якорного тока (а,б) и принцип «предуправления» (в)
Переходные процессы рис.5.24,а подтверждают правильность расчета контурных регуляторов, т.к. получился оптимальный переходный процесс с нулевой статической ошибкой регулирования якорного тока.
Двойной контур регулирования якорного тока (по сравнению с ПИ регулятором тока) так же обеспечивает меньшую статическую ошибку регулирования (рис.5.24,б), вызванную действием внутренней обратной связи по ЭДС электродвигателя, что можно объяснить влиянием ЭДС электродвигателя только на внутренний контур регулирования тока, в то время, как внешний интегральный регулятор тока РТ2, не подвержен влиянию возмущающего воздействия и значительно снижает ошибку регулирования (для данного примера
∆i% <0,5%).
157
5.1.3.3. Предуправление в контуре регулирования якорного тока
Система управления электроприводом в преобразователях «Simoreg» фирмы «SIEMENS» построена по принципу подчиненного регулирования координат с последовательной коррекцией и реализована при помощи двух быстродействующих микропроцессоров. Расчет всех переменных и реализация регуляторов и элементов системы управления ведется в цифровом виде, на основании известных математических выражений, что позволяет повысить точность регулирования при высоком быстродействии.
Функции, связанные с регулятором тока якоря и регулятором скорости вызываются и вычисляются синхронно с отпирающими импульсами тиристоров силового моста якорной цепи (т.е. каждые 3,33 мс при сетевой частоте 50 Гц).
При реализации контура регулирования якорного тока специалистами фирмы «SIEMENS» предложено так называемое «предуправление» (рис.5.24,в), когда параллельно регулятору тока включен блок «предуправления», в котором в зависимости от величины заданного якорного тока (uзт) на основании известных параметров привода: сопротивления якоря двигателя (Ra), индуктивности якорной цепи (La), напряжения на якоре ( Ua) и ЭДС двигателя (Ea) вычисляется управляющее задание для достижения требуемого тока (Uу1), поступающее на сумматор. На второй вход сумматора подается выходное напряжение ПИ регулятора тока (Uу2), входным сигналом для которого
является ошибка регулирования якорного тока ∆uт = uзт − uот , которую регулятор тока сводит к нулю.
На выходе сумматора формируется результирующее напряжение управления Uу, поступающее на вход ТП.
При таком принципе регулирования на блок «предуправления» возложена функция формирования необходимой величины якорного тока во всех режимах работы электропривода, а на регулятор тока возложена функция обеспечения динамических свойств токового контура и
обеспечение нулевой ошибки регулирования ∆uт = uзт − uот = 0 .
Блок «предуправления» устраняет влияние ЭДС двигателя на работу токового контура и обеспечивает настройку контура тока на модульный оптимум во всех режимах работы электропривода, сохраняя одинаковое быстродействие как в режиме непрерывного тока, так и в режиме прерывистых токов.
158

Контрольные вопросы:
1.В каких случаях применяют двухконтурное регулирование якорного тока?
2.Исходя из каких условий настраивается внутренний контур регулирования якорного тока?
3.Как определить коэффициент усиления внутреннего регулятора
тока?
4.Как правильно рассчитать минимальную постоянную времени двухконтурного регулирования?
5.Как определить передаточную функцию внешнего регулятора
тока?
6.С какой целью применяют двухконтурное регулирование якорного тока?
7.Объясните, как происходит адаптация данного регулятора к режиму прерывистых токов?
8.Поясните принцип «предуправления» на примере рис.5.24,в.
5.2 Настройка контура регулирования скорости вращения электропривода
После настройки внутреннего контура регулирования тока якоря выполняется настройка внешнего конура регулирования скорости вращения электродвигателя.
Для регулирования скорости вращения электродвигателя необходимо сформировать на его валу необходимый момент. Эту задачу выполняет регулятор скорости (РС). Выходное напряжение РС поступает на вход подчиненного ему регулятора тока, формируя необходимую величину тока, а, следовательно, при неизменной величине магнитного потока и пропорционального току момента.
В контур регулирования скорости входят: регулятор скорости, передаточную функцию которого необходимо определить, внутренний замкнутый контур регулирования якорного тока ЗТК, объект регулирования (электромеханический преобразователь), цепь отрицательной обратной связи по скорости (тахогенератор, делитель напряжения, датчик напряжения). Структурная схема контура регулирования скорости вращения электродвигателя представлена на рис. 5.25.
159

uзс |
|
|
|
|
РС |
|
u |
|
|
|
|
|
ЗТК |
Ia |
|
|
ЭМП |
ω |
|||||
|
|
∆uс |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
зт |
|
|
|
|
1/ kот |
|
|
|
Rэ |
/ с |
||||||||
|
|
W |
(p) |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
рс |
|
|
|
|
|
|
2Tµp(Тµр +1) +1 |
|
|
|
Тмр |
|
|
|
||||
|
|
uос |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
ТГ + Дел + ДН |
|
i = 2 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис.5.25. Структурная схема контура регулирования скорости вращения электродвигателя
Коэффициент пропорциональности между величиной действительной скорости вращения и напряжением обратной связи по скорости (или напряжением задания величины скорости) называется
коэффициентом обратной связи по скорости koс и рассчитывается по формуле:
kоc = uзсmax = uосmax = |
(8 -10)В |
, |
|
ω |
ω |
ω |
|
max |
max |
max |
|
где ωmax - максимальная скорость вращения электродвигателя, определяемая из технологических требований к электроприводу.
Для настройки контура регулирования на МО передаточная функция регулятора скорости (РС) в соответствии с (5.11) для
i = 2 определится:
W (p) = |
1 |
|
Tмp |
kот |
= |
Tм |
|
c |
kот |
= k |
|
. (5.26) |
|||||
рс |
22 T p R |
э |
/ с k |
ос |
|
4T |
|
R |
э |
k |
ос |
|
рс |
|
|||
|
µ |
|
|
|
|
|
µ |
|
|
|
|
|
|
||||
Как видно из последнего выражения регулятор скорости имеет структуру пропорционального регулятора (П – РС) с коэффициентом
передачи kрс . Поскольку выходное напряжение РС является задающим напряжением для контура регулирования тока, то для ограничения
160