Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
РС получается напряжение |
задания величины тока якоря |
|||||||||||||
uзт отрицательной полярности. |
|
|
|
|
|
|
|
|
|
|
|
|
||
+ uзс |
R4 |
|
|
БО |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
R |
|
6 |
|
|
|
|
|
|
|
||
−uос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R5 |
|
|
|
|
|
|
|
|
|
|
|
−uзт |
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.5.28. Принципиальная схема РС
Для обеспечения одинакового коэффициента передачи РС по цепям задания и обратной связи (однозначного соответствия между
напряжениями uзс и uос ) величины сопротивлений входных резисторов
принимаются одинаковыми R4 = R5 . Коэффициент усиления РС определяется отношением величины сопротивления резистора в цепи
обратной связи к величине |
сопротивления |
входного резистора, т.е. |
kрс = R6 / R5 = R6 / R4 . В |
цепи обратной |
связи РС включен блок |
ограничения БО выходного напряжения РС, имеющий зону
нечувствительности, ограниченную « − uзтmax » - « + uзтmax », для обеспечения характеристики РС, показанной на рис.5.26.
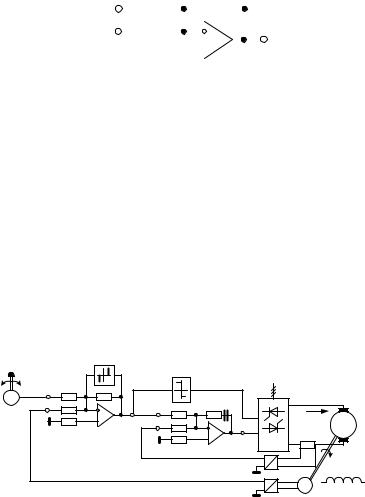
Принципиальная электрическая схема однократноинтегрирующей системы регулирования, реализованной на аналоговых операционных усилителях, представлена на рис.5.29.
|
БО |
|
|
|
|
|
|
+uзс R4 |
РЭл |
|
|
|
|
|
|
R6 |
|
|
|
|
|
|
|
КА −uос R5 |
−uзт |
R1 |
R3 C1 |
+ Uлпу |
Ia |
|
|
|
+uот |
R2 |
|
|
|
||
|
|
+ Uу |
|
|
М |
||
|
РС |
|
|
RS |
|
||
|
|
|
|
|
|
||
|
|
|
РТ |
ТП |
|
|
|
|
|
|
|
|
ω |
||
|
|
|
|
|
|
|
|
|
|
|
|
ДТ |
|
|
LM |
|
|
|
|
|
ТГ |
+ |
- |
|
|
|
|
ДН |
|
|
|
Рис.5.29. Принципиальная электрическая схема однократноинтегрирующей СУЭП
166
Напряжение задания скорости вращения на входе РС формируется
спомощью командоаппарата КА; полярность напряжения uзс
определяет направление вращения электродвигателя, а величина uзс -
скорость идеального холостого хода электродвигателя. В схеме предусмотрено формирование напряжения выбора необходимой группы ТП («Вперед» или «Назад») при помощи релейного элемента РЭл, на вход которого подается напряжение задания величины якорного тока
uзт , а на выходе формируется входное напряжение логического
переключающего устройства ТП UЛПУ , полярность которого определяет выбор нужной группы ТП.
Определим динамические свойства однократноинтегрирующей системы регулирования, для чего выведем передаточную функцию замкнутого контура регулирования скорости вращения, настроенного на
МО использую структурную схему рис.5.25 и выражение для kрс (5.26),
когда выходной координатой является скорость вращения электродвигателя ω, а входной - напряжение задания скорости на входе
РС uзс :
W |
(p) = |
|
ω(p) |
|
= |
|
1 |
|
|
|
|
= |
|
|
||||||||||
uзс (p) |
|
|
Tмp |
|
|
|
|
|
|
|
||||||||||||||
|
|
замс |
|
|
|
|
|
|
|
|
|
+ kос |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kрсWзтк (p)Rэ / с |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
= |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
= |
(5.30) |
||
|
4Tµ R |
|
k |
|
сT p |
(2Tµp(Tµp +1) |
+1) |
|
+ kос |
|||||||||||||||
|
|
|
|
|
э |
|
|
ос |
м |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Tм |
|
с |
kот |
Rэ |
|
|
|
1/kот |
|
|
|
|
|
|
|
|
|
|||||
= |
|
|
|
|
|
|
|
1/ kос |
|
|
|
|
= |
1/ kос |
|
|
|
|
|
|||||
4T p(2T p(T p +1) +1) +1 |
Q |
(p). |
|
|
|
|
|
|
||||||||||||||||
µ |
|
|
µ |
|
µ |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
||||
Как видно из (5.30) динамические свойства замкнутого контура регулирования скорости определяются только минимальной постоянной
времени Tµ независимо от параметров объекта регулирования и имеют
показатели, соответствующие системе третьего порядка, настроенной на МО (таблица 1).
167
Передаточная функция разомкнутого конура регулирования скорости, настроенного на МО, будет отличаться от передаточной функции разомкнутого токового контура, только величинами постоянных времени, отличающимися при настройке на МО в два раза, т.е.
W |
(p) = uос (p) |
= |
|
|
1 |
≈ |
1 |
|
|
1 |
, |
|||
4T p(2T2p2 + 2T p +1) |
4T p (2T p +1) |
|||||||||||||
разс |
u |
зс |
(p) |
|
|
|
||||||||
|
|
|
|
µ |
µ |
µ |
|
µ |
|
|
µ |
|
||
откуда видно, что частота среза контура регулирования скорости в |
|
|||||||||||||
два раза |
меньше |
|
частоты среза |
контура регулирования |
тока |
|
||||||||
ωсс =1/ 4Tµ и для |
Tµ =1.67…10.0 |
мс |
будет находиться в пределах |
|
||||||||||
150…25 с-1
Пример 11. Для параметров СУЭП, рассмотренных в примерах 5 и
9 (kп = 25; Тμ = 0,01с; Rэ = 0,115Ом; Тэ = 0,05с; с=кФн=3,5 Вс; Тм =
0,08с; kот= 0,0208 В/А; ωн =59,1с-1), рассчитать параметры регулятора скорости и оценить динамические свойства контура регулирования скорости.
Примем за максимальную скорость вращения скорость идеального холостого хода электродвигателя при номинальном напряжении: ωmax = ω0 = Uн/с = 220/3,5 ≈63 с-1, тогда коэффициент обратной связи по скорости будет равен: kос = uосmax/ ωmax = uзсmax/ ωmax = 10/63 = 0,1587 Вс.
Коэффициент передачи РС определится: kрс=(Тм*с*kот)/(4Тμ*Rэ*kос)= (0,08*3,5*0,0208)/(4*0,01*0,115*0,1587) =
7,98. Для моделирования переходных процессов воспользуемся отлаженной моделью замкнутого токового контура ЗТК, настроенного на МО с компенсацией влияния внутренней обратной связи по ЭДС электродвигателя (пример 10), дополнив модель внешним контуром регулирования скорости. Схема модели представлена на рис.5.30.
168
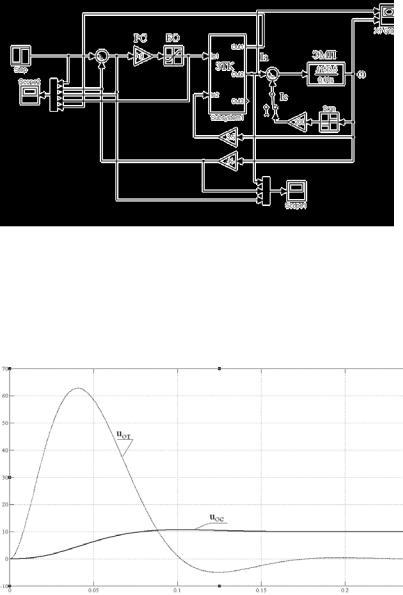
Рис.5.30. Схема модели контура регулирования скорости
Результаты моделирования контура регулирования скорости при скачкообразном задании максимального напряжения uзсmax =10В в
режиме холостого хода без ограничения выходного напряжения РС (система остается линейной) представлены на рис. 5.31.
Рис.5.31. Переходные процессы в линейной системе регулирования скорости
169

Как видно из рис.5.31 переходные процессы соответствуют настройке контура регулирования скорости на МО, в соответствии с
таблицей 1 (время нарастания 7,6 Tµ , перерегулирование 8%). Однако
это соответствует лишь теоретическим переходным процессам, поскольку для обеспечения такого быстродействия контура скорости необходимы значения якорного тока в 15…20 раз превышающие номинальный ток (см. рис.5.31), что невозможно получить в двигателях постоянного тока независимого возбуждения, у которых перегрузка по току не превышает λI≤2,5. К тому же и разгон электродвигателя за время
7,6 Tµ не только невозможен, но и не нужен, поскольку большинство
механизмов обладают вполне определенной величиной ускорения, требуемого для обеспечения технологического процесса.
Контрольные вопросы:
1.Какие звенья входят в состав контура регулирования скорости двигателя?
2.Как правильно рассчитать коэффициент обратной связи по скорости?
3.Выведите передаточную функцию регулятора скорости.
4.С какой целью выполняется ограничение выходного напряжения регулятора скорости?
5.Нарисуйте характеристику вход – выход регулятора скорости.
6.Выведите уравнение электромеханической характеристики однократно – интегрирующей СУЭП.
7.От чего зависит статическая просадка скорости в данной СУЭП?
8.Почему данную систему регулирования называют астатической по заданию и статической по нагрузке (для пояснения используйте электромеханические характеристики)?
9.Как отрабатывает данная система регулирования возрастание момента нагрузки на валу двигателя (для пояснения используйте характеристику регулятора скорости и электромеханические характеристики)?
10.Поясните назначение элементов в схеме рис. 5.29.
11.Что определяет полярность напряжения задания на входе регулятора скорости?
12.На что влияет величина напряжения задания на входе регулятора скорости?
13.С какой целью в схеме рис.5.29 применяют релейный элемент?
170