Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
При этом на выходе РС будет сформировано максимальное задание якорного тока uзтmax = 10В, в якорной цепи будет протекать
максимальный ток Ia = 2,5Iн , и электродвигатель будет разгоняться с
ускорением, меньше заданного, т.к. величина динамического тока будет меньше требуемой: Iдин = Ia − Ic = 2,5Iн −1,6Iн = 0,9Iн . Как только РС
заходит в ограничение, происходит размыкание контура регулирования скорости, поэтому увеличение ошибки ∆uс на входе РС не приводит к
увеличению якорного тока. Замыкание контура регулирования скорости происходит тогда, когда РС выходит из зоны ограничения на линейный участок характеристики (рис.5.26), что вызывает уменьшение якорного
тока до величины Ia = Iс =1,6Iн , определяемой величиной ошибки на входе РС в установившемся режиме.
Таким образом, если РС не находится в ограничении, т.е. система регулирования линейная, пуск электродвигателя будет происходить с заданным ускорением, определяемым темпом изменения выходного
напряжения ЗИ U0 / TЗИ , как на холостом ходу, так и под нагрузкой.
Контрольные вопросы:
1.Как выполняется ограничение регулируемой координаты в СПРК с помощью блока ограничения?
2.Какой основной недостаток присущ данному способу ограничения?
3.Какие элементы входят в состав задатчика интенсивности? Поясните работу ЗИ, его основные режимы работы.
4.Что определяет темп изменения выходного напряжения ЗИ?
5.Как правильно рассчитать постоянную времени ЗИ для обеспечения требуемого ускорения электропривода?
6.Чем определяется величина динамического тока электропривода?
7.Чем определяется установившаяся скорость при пуске от ЗИ?
8.Как формируется необходимая величина динамического тока?
9.Как получить уравнения переходных процессов тока и скорости при работе от ЗИ?
10.Почему при пуске от ЗИ заданное ускорение обеспечивается как на холостом ходу, так и под нагрузкой? Какое условие при этом должно выполняться?
211

5.4.1.2 Формирование требуемого ускорения в двукратноинтегрирующей системе регулирования
Структурная схема двукратно – интегрирующей системы регулирования с включенным на входе ЗИ, представлена на рис.5.55.
|
|
|
|
|
|
РЭл |
|
И |
ЗКC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
uз |
|
|
|
|
|
|
|
|
|
|
|
U0 |
|
|
uзс |
|
|
|
|
|
|
|
ω |
|
|
Ia |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
(8Tµp +1) / kос |
|
|
|
|
Тмр |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тзи р |
|
|
|
|
8Tµp(4Tµp(2Tµp(Тµр +1) +1) +1) +1 |
|
|
|
|
|
Rэ / с |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
U0 |
|
|
|
И |
uзс |
|
|
|
|
|
|
|
|
|
ЗКC |
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ia |
||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
(8T p +1) / k |
ос |
|
|
|
Тмр |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
µ |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
Тзи р |
|
|
|
|
|
|
8Tµp(4Tµp(2Tµp(Тµр +1) +1) +1) +1 |
|
|
|
Rэ / с |
|
|
|
|
|
б) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.5.55. Структурная схема двукратно – интегрирующей СУЭП с ЗИ
На рис.5.55,а показана структурная схема двукратно – интегрирующей системы регулирования с задатчиком интенсивности на входе замкнутого контура регулирования скорости (ЗКС) без учета фильтра на входе РС, поэтому в передаточной функции контура
регулирования скорости присутствует форсирующее звено (8Tµp +1) . На рис.5.55,б показана структурная схема, соответствующая линейному изменению выходного напряжения ЗИ uзс , когда обратная связь по
выходному напряжению ЗИ не влияет на работу релейного элемента Рэл. В этом случае передаточная функция, связывающая выходную
координату Ia (p) с входной координатой U0 (p) примет вид:
W |
(p) = |
I |
|
(p) |
= |
T |
|
с |
|
8Tµp +1 |
|
a |
|
м |
|
|
|
|
|||
1 |
|
U0 (p) |
|
Tзи Rэkос 8Tµp(4Tµp(2Tµp(Tµp +1) +1) +1) +1 |
||||||
|
|
|
||||||||
,
откуда можно получить следующее выражение:
212

Ia (p) = |
U |
(p) |
T с |
( |
8Tµ |
p + |
1 |
), |
|
0 |
|
м |
|
|
(5.53) |
||||
|
Rэkос |
Q4 (p) |
Q4 (p) |
||||||
|
Tзи |
|
|
|
|
||||
где Q4 (p) - оптимальный полином четвертого порядка.
Как видно из (5.53) переходный процесс тока якоря при пуске от ЗИ определяется полиномом Q4 (p) и соответствующей ему переходной
функцией h4 (τ) и ее первой производной h4/ (τ) , поэтому после
преобразований можно получить уравнение переходного процесса тока якоря при пуске от ЗИ:
Ia (τ) = U0 Tмс (1−e−2τ((1+ 6τ)cos(2τ) + 2(τ−1)sin(2τ))),
Tзи Rэkос
(5.54)
где τ = t /8Tµ - относительное время.
Установившееся значение величины якорного тока соответствует необходимой величине динамического тока и, аналогично (5.49), определяется следующей зависимостью:
Ia уст = |
U0 |
Tмс |
= Iaдин |
(5.55) |
|
||||
|
Tзи |
Rэkос |
|
|
Переходный процесс для скорости электродвигателя при пуске от ЗИ получается путем интегрирования выражения (5.54):
|
R |
/ с τ |
U |
|
8Tµ |
|
− |
τ |
|
|
ω(τ) = |
Tэ |
∫Ia (τ)dτ = |
|
0 |
|
|
(τ−e |
2 |
|
((1,5 + τ)sin(2τ) − |
T |
k |
|
|
|
||||||
|
м 0 |
зи |
|
oc |
|
|
|
|
||
− 2τcos(2τ))).
(5.56)
В установившемся режиме скорость электродвигателя будет изменяться линейно с заданным темпом:
213
ωуст (τ) = |
U |
0 |
|
8Tµ |
|
τ, |
(5.57) |
||
|
|
koc |
|
||||||
|
Tзи |
|
|
|
|
||||
если в выражение (5.57) подставить значение относительного |
|||||||||
времени τ = t /8Tµ , то |
|
получится |
уравнение переходного процесса |
||||||
скорости электродвигателя ωуст (t) : |
|
||||||||
ωуст (t) = |
U0 |
1 |
|
t. |
(5.58) |
||||
koc |
|||||||||
|
Tзи |
|
|
|
|||||
Как видно из выражений (5.55-5.58) величина динамического тока и изменение скорости во времени определяются настройкой ЗИ, т.е.
величиной отношения U0 / Tзи . Чем больше будет величина отношения
U0 / Tзи , тем больше будет величина динамического тока и, соответственно, больше ускорение электродвигателя.
Пример 14. Для двукратно – интегрирующей системы регулирования с параметрами, рассчитанными в примерах 5,11 и 13, определить динамические свойства при пуске от ЗИ, обеспечивающего величину динамического тока Iдин = 1,2*Iн. Для получения модели двукратно – интегрирующей системы управления, в схему РС на рис. 5.50 необходимо добавить звено с передаточной функцией (8Tμp+1)/(8Tμp). Рассмотрим результаты моделирования переходных процессов двукратно
– интегрирующей системы управления без дополнительного фильтра на входе РС.
На рис.5.56,а представлены переходные процессы напряжений на выходе ЗИ (на входе РС) uзс , обратной связи по скорости uос и току
uот и ошибки на входе ПИ – РС ∆uс = uзс − uос при пуске от ЗИ в режиме холостого хода на начальном этапе пуска. Напряжение обратной
связи по скорости uос , пропорциональное скорости вращения электродвигателя, изменяется в соответствии с выражением (5.56). ПИ – РС сводит ошибку регулирования скорости ∆uс = uзс − uос к нулю, за
214
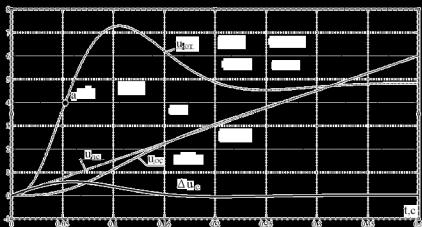
это время на выходе РС формируется задание величины якорного тока
uзт = kотIa дин .
На рис.5.56,б приведены переходные процессы напряжений: ошибки на входе ПИ – РС ∆uс = uзс − uос , составляющие выходного
напряжения РС – |
пропорциональная uп = kрс∆uс , |
интегральная |
||
uи = |
1 |
∫∆ucdt и |
их сумма uвыхРС = uзт = uп + uи . |
Как видно из |
T |
||||
|
рс |
|
|
|
переходных процессов на рис.5.56,б, после затухания переходных составляющих, на выходе РС устанавливается величина напряжения,
которую «наинтегрировал» РС uзт = uи , сводя ошибку регулирования скорости ∆uс = uзс − uос к нулю. Следовательно, величина напряжения
uзт (величина якорного тока) определяется величиной ошибки ∆uс , которую интегрирует РС.
а)
215