Материал: Д6736 Вороненко БА Введение в математ моделирование
Обобщение сказанного показывает, что математическое моделирование включает три взаимосвязанных этапа:
1)составление математического описания изучаемого объекта;
2)выбор метода решения системы уравнений (неравенств) математического описания и реализация его в форме моделирующей программы;
3)установление соответствия (адекватности) модели объекту. В настоящее время математическое моделирование является
одним из самых результативных и наиболее часто применяемых методов научного исследования. Оно опирается на математику, физику, химию, биологию и многие другие научные дисциплины, играя синтезирующую роль.
Рассмотрим примеры некоторых математических моделей. Простейшими такими моделями являются основные, базисные
математические понятия типа производной и интеграла: понятие производной отображает общее свойство – скорость изменения какого-либо параметра изучаемого объекта, понятие интеграла – это математическая модель аддитивных физических или геометрических величин – длины линии, площади фигуры, объема тела, пути, массы, энергии и т.д.
Фактически все современные разделы физики посвящены построению и исследованию математических моделей различных физических объектов и явлений.
Примером математического моделирования может служить процесс охлаждения тела и классическая механика точки И.Ньютона, с помощью которой можно описать движение любого материального объекта, размеры которого малы по сравнению с расстояниями, проходимыми телом. В последнем случае величинами, характеризующими состояние материального тела, являются координаты, скорость и ускорение его центра масс, затем углы поворота относительно трех фиксированных плоскостей и соответствующие угловые скорости и ускорения, далее, взаимные перемещения отдельных частей тела (например, собственные колебания, происходящие в веществе) и, наконец, координаты, скорости и ускорения отдельных молекул, атомов и элементарных частиц этого тела.
Однако хвататься за все сразу невозможно, поэтому на первой стадии идеализации (упрощения) тело считают точкой, т.е. пренебрегают его протяженностью. Тогда состояние будет полностью определяться координатами, заданными как функции времени, т.е. законом,
16
с помощью которого можно вычислить положение тела для любого момента времени.
Движение должно подчиняться основным законам механики, и это указывает путь к решению задачи.
Второй закон динамики Ньютона гласит: «Изменение количества движения (устаревший, не рекомендуемый в физике термин; то же, что импульс материальной точки механической системы) пропорционально приложенной движущей силе, и происходит по направлению той прямой, по которой эта сила действует» (перевод с латинского замечательного отечественного кораблестроителя и математика А.Н.Крылова). Математически это можно записать так:
= , |
(1) |
где через 

 обозначается быстрота изменения импульса m
обозначается быстрота изменения импульса m (m –
(m –
масса частицы,  – скорость перемещения частицы) со временем, т.е. производная от импульса по времени.
– скорость перемещения частицы) со временем, т.е. производная от импульса по времени.
В таком виде уравнение применимо к чему угодно. Конкретный его вид определяется правой частью – равнодействующей всех внешних сил, действующих на тело. Рассмотрим основные случаи, которые здесь могут представиться. Будем считать, что движение происходит по прямой линии, поэтому в дальнейшем не будем прибегать к векторным величинам.
Изменение импульса при постоянстве массы полностью определяется изменением скорости, поэтому
= m |
|
. |
(2) |
|
1. Внешняя сила – сила сопротивления среды, в которой движется тело, – прямо пропорциональна скорости. Такая пропорциональность имеет место только при малых скоростях или в очень разреженных средах; при движении автомобиля сопротивление воздуха растет уже как квадрат скорости. Для первоначального предположения уравнение (математическая модель) будет таким:
m |
|
= – |
или |
|
+ |
|
= 0, |
|
|
|
где  – коэффициент пропорциональности.
– коэффициент пропорциональности.
17

2. Сила f, равнодействующая всех сил, приложенных к телу, постоянна. Можно написать:
или |
|
– |
|
= 0. |
(3) |
|
|
3. Сила зависит от координаты x, 
 . Уравнение будет
. Уравнение будет
таким:
m |
|
= . |
(4) |
|
4. Сила, как и в предыдущем случае, зависит от x, и, кроме того, присутствует сопротивление среды. Уравнение запишется так:
m |
|
+ kV – |
. |
(5) |
|
5. Если добавить к сформулированным условиям внешнюю силу F, зависящую от времени, то получится уравнение
m |
|
+ kV – |
F(t). |
(6) |
|
Во всех пяти примерах пришли к уравнениям, которые содержат неизвестную функцию (скорость, как функция времени), а также ее производные. Как известно, такие уравнения называются дифференциальными, ибо операция отыскания производной называется дифференцированием (более того, обыкновенными дифференциальными уравнениями (ОДУ) – в уравнение входит функция одного аргумента). Решив эти ОДУ, т.е. найдя функции, им удовлетворяющие, установим, как движется тело в том или ином случае.
18
5.БЕСКОНЕЧНОЕ ЗАМЕДЛЕНИЕ
Аона все падала и падала. Неужели
этому не будет конца? Л. Кэрролл «Алиса в стране чудес»
Физика учит нас допрашивать дифференциальное уравнение.
Акад. Л.И. Мандельштам
Рассмотрим уравнение, описывающее движение тела в среде, сопротивление которой движущемуся телу пропорционально скорости:
+ |
|
= 0, или V + |
|
= 0. |
(1) |
|
|
Иногда написанный закон изменения называется уравнением Мальтуса, так как предположительно первым его получил в 1798 г. английский экономист и священник Т.Р. Мальтус. Мальтус применил указанный закон к описанию демографической ситуации в масштабах всей планеты, предсказывая перенаселенность при относительной ограниченности средств существования людей: «для любой популяции (в том числе человеческой) верна закономерность: если ничто не сдерживает ее роста, то численность увеличивается по экспоненциальному закону (в терминологии Мальтуса, по геометрической прогрессии)». (Т. Мальтус «Опыт закона о народонаселении»).
Уравнение (1) – это обыкновенное дифференциальное уравнение (ОДУ) с разделяющимися переменными.
Разделяем переменные и интегрируем:
|
= – |
|
, |
(2) |
||
|
|
|||||
– |
= – |
|
t, |
(3) |
||
|
||||||
где С = const  0.
0.
Потенцируя, находим:
V(t) = C – |
|
, |
(4) |
|
то есть получаем общее решение исходного дифференциального уравнения. Оно содержит произвольную постоянную C. При любом
19
конкретном значении C получается конкретная функция, удовлетворяющая уравнению, т.е. частное решение. Таким образом, общее решение включает в себя бесчисленное множество частных решений.
При рассмотрении определенной физической задачи обычно требуется найти частное решение – однозначно определить, как будет протекать такой-то процесс. Выделить из общего решения частное решение помогают начальные условия. В данном примере математическое условие, описывающее задание скорости тела в начальный момент времени движения тела t = 0, будет выглядеть так:
V(0) = V0 = const. |
(5) |
Действительно, подставляя t = 0 в (4) и используя (5), придем к равенству C = V0. Окончательный ответ (скорость как функцию времени в данном конкретном случае) получаем в виде
V(t) = V0 |
|
|
|
. |
(6) |
|
|
Это частное решение, соответствующее данным задачи. Именно по этому закону будет двигаться тело, имевшее начальную скорость V0 и массу m при наличии сопротивления с коэффициентом сопротивления k.
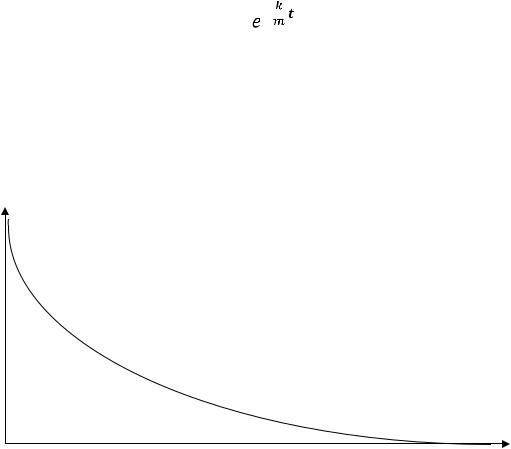
Особенности этого движения видны наглядно, если изобразить функцию скорости графически (рис. 3).
V
V0
0 |
t |
Рис. 3. График зависимости скорости движения тела от времени в среде с сопротивлением
20