Материал: Polyakov_Tu_Metoda
© К.Ю. Поляков, 2008
Здесь остались только две изменяющиеся величины: расход насоса Q(t) (вход объекта) и уровень воды h(t) (выход). Далее для упрощения записи мы не будем явно указывать зависимость
этих сигналов от времени.
В установившемся (статическом) режиме, когда сигналы не изменяются, все производ- dh(t)
dt
0 = Q −α h h = |
Q2 |
. |
(7) |
|
α2 |
||||
|
|
|
Эта зависимость между установившимися значениями входа Q и выхода h называется статической характеристикой. Она позволяет для любого заданного постоянного значения Q на входе получить значение выхода h.
Теперь предположим, что задана некоторая рабочая точка, то есть, значения входа Q = Q0 и выхода h = h0 удовлетворяют уравнению (7), и система все время работает около этого поло-
жения равновесия. Вблизи этой точки
Q = Q0 + ∆Q и h = h0 + ∆h ,
где ∆Q и ∆h – малые отклонения входа и выхода от рабочей точки.
Дальше для линеаризации используется разложение функций в ряд Тейлора. Для некото-
рой функции |
f (x, y) в окрестности точки (x0 , y0 ) |
этот ряд имеет вид: |
|
|
|||||||
|
f (x, y) = f (x |
, y |
0 |
) + |
∂f (x0 , y0 ) |
∆x + |
∂f (x0 , y0 ) |
∆y + F(x, y) , |
|
|
|
|
|
|
|
|
|||||||
|
0 |
|
|
∂x |
|
∂y |
|
|
|||
|
|
|
|
|
|
|
|
||||
где ∂f (x0 , y0 ) |
и ∂f (x0 , y0 ) – частные производные функции f (x, y) по x и по y в точке (x , y |
0 |
) , а |
||||||||
∂x |
∂y |
|
|
|
|
|
0 |
|
|||
|
|
|
|
|
|
|
|
|
|
||
F(x, y) зависит от высших производных в той же точке (второй, третьей и т.д.). При малых зна-
чениях ∆x и ∆y можно считать, что «хвост» этого ряда F(x, y) |
очень мал, примерно равен ну- |
||||||||||||||||||||||||
лю, поэтому |
|
|
|
|
|
|
|
|
|
|
|
∂f (x0 , y0 ) |
|
|
∂f (x0 , y0 ) |
|
|
|
|
||||||
|
|
f (x, y) ≈ f (x , y |
) + |
∆x + |
∆y . |
|
|
(8) |
|||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
0 |
0 |
|
|
|
|
∂x |
|
|
|
|
|
∂y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Применим формулу (8) для линеаризации правой части уравнения (6), где в роли x высту- |
|||||||||||||||||||||||||
пает расход Q, а в роли y – уровень h. Выполняя дифференцирование, находим |
|
||||||||||||||||||||||||
|
|
∂ |
1 |
Q − |
α |
|
|
= |
1 |
, |
∂ 1 |
Q − |
α |
|
|
|
|
α |
. |
|
|
||||
|
|
|
|
S |
h |
S |
|
S |
h = − |
2S h |
|
|
|||||||||||||
|
∂Q S |
|
|
|
|
|
|
|
∂h S |
|
|
|
|
|
|
|
|
||||||||
Тогда с помощью формулы (8) получаем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
1 Q −α |
h ≈ 1 |
Q −α |
h + |
1 ∆Q − |
α |
h |
∆h . |
|
|
|
|||||||||||||
|
|
S |
|
S |
|
|
S |
|
|
|
0 |
S |
0 |
S |
|
|
2S |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
Подставим Q = Q + ∆Q |
и h = h + ∆h в уравнение (6) и учтем, что d(h0 + ∆h) = d∆h . Тогда |
||||||||||||||||||||||||
0 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
dt |
|
|
|
|
d∆h ≈ 1 |
|
|
|
α |
h + 1 ∆Q − |
α |
|
|
|
|
||||||||||||
|
|
|
Q − |
∆h . |
|
|
|
||||||||||||||||||
|
|
|
dt |
S |
0 |
|
|
S |
0 |
S |
|
|
2S |
h |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
Вспоминая, что Q и h |
соответствуют статическому режиму, то есть 1 |
Q − |
α |
h = 0 , получа- |
|||||||||||||||||||||
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
0 |
S |
0 |
ем линеаризованное уравнение в отклонениях от рабочей точки: |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
d∆h |
+ kh ∆h ≈ kQ ∆Q , |
|
|
|
|
|
|
|
(9) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
16
|
|
|
|
|
|
|
|
|
|
|
|
|
© К.Ю. Поляков, 2008 |
где k |
h |
= |
α |
и |
k |
Q |
= 1 . Заметим, что коэффициент k |
h |
зависит от h , то есть от выбора рабо- |
||||
|
|
2S |
h0 |
|
S |
|
|
|
0 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
чей точки. В этом проявляется нелинейность объекта. |
|
|
|
||||||||||
|
Обычно при записи линеаризованного уравнения знак ∆ (обозначающий отклонение) не |
||||||||||||
пишут. Таким образом, окончательно получаем линеаризованную модель |
|||||||||||||
|
|
|
|
|
|
|
dh(t) +kh h(t) = kQ Q(t) . |
(10) |
|||||
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
Но нужно помнить, что это уравнение в отклонениях, и оно справедливо только при малых от- |
|||||||||||||
клонениях от рабочей точки (Q0 , h0 ) . При выборе другой рабочей точки коэффициент kh полу- |
|||||||||||||
чится другой. |
|
|
|
|
|
|
|
|
|
||||
2.6. |
Управление |
|
|
|
|
|
|
||||||
|
Посмотрим на примере, как можно управлять объектом и что из этого получается. Немно- |
||||||||||||
го изменим предыдущую задачу, разрешив потоку вытекающей жидкости q изменяться незави- |
|||||||||||||
симо (в теории управления это называется нагрузкой на объект). |
|
||||||||||||
|
Для того, чтобы обеспечить водой всех жителей деревни, построили водонапорную баш- |
||||||||||||
ню, в которую насосом закачивается вода из реки. Каждый житель может в любой момент |
|||||||||||||
включить воду на своем участке, например, для полива. Нужно построить систему, которая ав- |
|||||||||||||
|
|
|
|
|
|
|
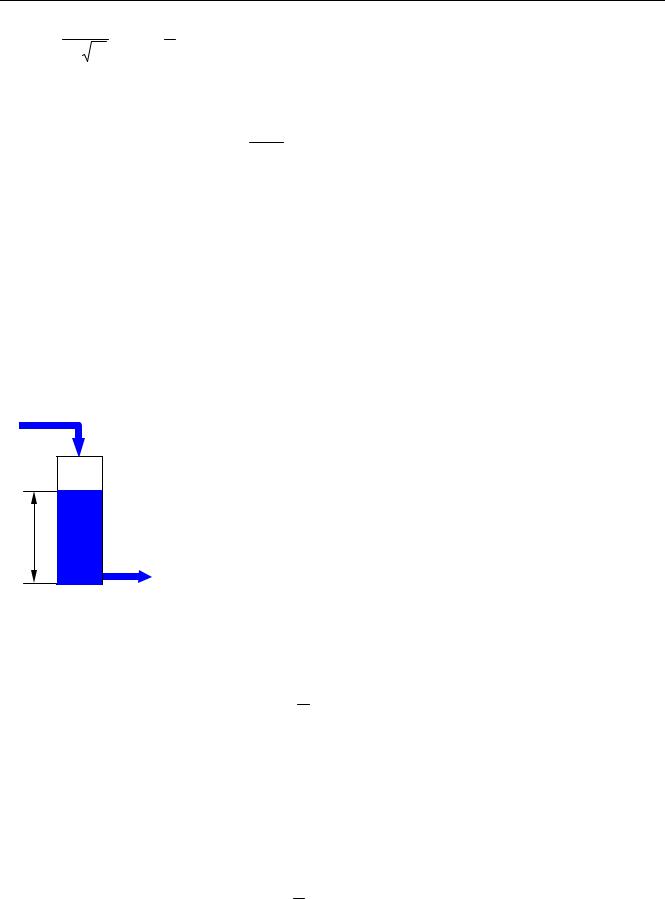
томатически поддерживает заданный уровень h0 воды в цистерне |
||||||
Q |
|
|
|
|
|
(в метрах). |
|
|
|
|
|
|
|
|
|
|
|
|
Будем считать, что жителей довольно много, поэтому у ко- |
||||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
го-то всегда включена вода и насос постоянно работает на закачку |
||||||
|
|
|
|
|
|
|
воды в цистерну. Для управления уровнем воды h мы можем из- |
||||||
|
|
|
|
|
|
|
менять его поток Q (в м3/с). Таким образом, уровень h – это регу- |
||||||
|
|
|
|
|
|
|
лируемая величина, а поток Q – сигнал управления. Для обратной |
||||||
|
|
|
|
|
|
|
связи используем датчик, измеряющий уровень воды h в цистер- |
||||||
h |
|
|
|
|
|
|
не. |
|
|
|
|
|
|
|
|
|
q |
|
|
Построим математическую модель объекта, то есть цистер- |
|||||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
ны. Поток на выходе q (в м3/с) показывает, сколько воды вытека- |
||||||
|
|
|
|
|
|
|
ет из цистерны за 1 с – это нагрузка. |
|
|||||
|
Изменение уровня ∆h зависит от разности потоков Q − q и площади сечения цистерны S . |
||||||||||||
Если разность потоков постоянна в течение интервала времени ∆t , то |
∆h(t) = Q(t) −q(t) ∆t . В |
||||||||||||
общем случае нужно использовать интеграл: |
|
|
|
|
S |
||||||||
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
∆h(t) = 1 |
∫t |
(Q(t) −q(t)) dt . |
|
|||
|
|
|
|
|
|
|
S |
0 |
|
|
|
|
|
|
Пусть в момент времени t = 0 уровень воды равен заданному значению, а входной и вы- |
||||||||||||
ходной потоки равны ( Q(0) = q(0) = q0 ), так что уровень не меняется. Этот режим мы примем за |
|||||||||||||
номинальный (рабочую точку). Для того, чтобы получить уравнение в отклонениях, представим |
|||||||||||||
потоки в виде |
|
|
Q(t) = q0 + ∆Q(t), q(t) = q0 + ∆q(t) , |
|
|||||||||
где ∆Q(t) и ∆q(t) |
|
|
|
||||||||||
– малые отклонения потоков от номинального режима. Тогда, опуская знак |
|||||||||||||
приращения ∆, можно записать модель объекта управления в форме |
|
||||||||||||
|
|
|
|
|
|
|
h(t) = 1 |
∫t |
(Q(t) −q(t)) dt . |
|
|||
|
|
|
|
|
|
|
S |
0 |
|
|
|
|
|
17
© К.Ю. Поляков, 2008
Здесь h(t) , Q(t) и q(t) обозначают отклонения этих величин от номинальных значений. Заметим, что эта модель может быть записана как дифференциальное уравнение (если найти произ-
водные обеих частей равенства): |
|
|
|
|
|
dh(t) |
= |
1 |
[Q(t) −q(t)]. |
|
dt |
S |
||
|
|
|
||
Для упрощения далее примем S =1м2. |
|
|
|
|
В качестве обратной связи мы будем использовать сигнал с датчика уровня. Ошибка управления вычисляется как разница между заданным и измеренным уровнями воды:
e(t) = h0 (t) −h(t) .
Применим самый простой регулятор – усилитель с коэффициентом K (или пропорциональный регулятор, П-регулятор), который управляет потоком по закону
q(t) = K e(t) = K [h0 (t) − h(t)].
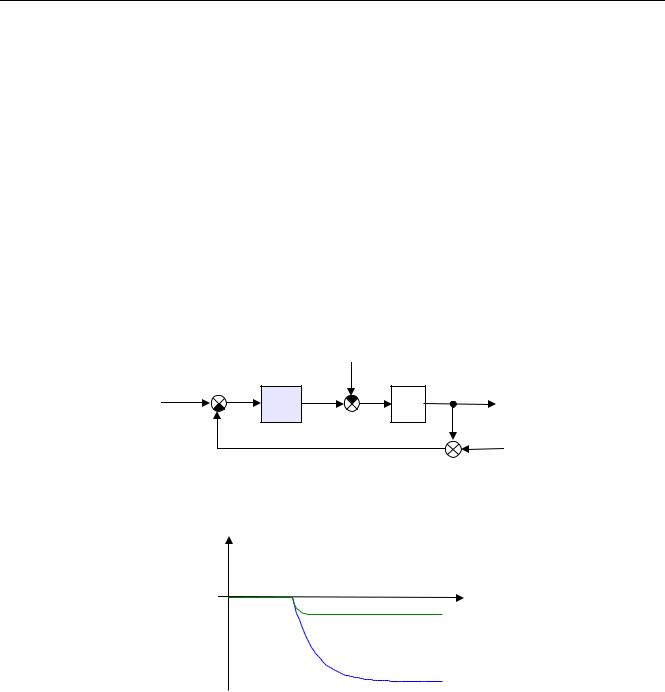
Структурная схема системы управления показана на рисунке ниже. Знак интеграла обозначает звено, модель которого – оператор интегрирования. С помощью кружка с секторами обозначается сложение сигналов. Если какой-то сектор закрашен черным цветом, входящий в него сигнал вычитается (учитывается в сумме со знаком «минус»). Кроме сигналов, о которых уже шла речь, на рисунке показан также шум измерения m(t) , искажающий показания датчика.
h0 |
|
регулятор |
– |
q объект |
|
|
+ |
e |
Q |
∫ |
h |
||
|
К |
+ |
||||
|
– |
|
|
|
|
|
m
Проверим работу этого регулятора при различных значениях коэффициента K. Сначала будем считать, что шума измерений нет, то есть уровень измеряется точно. Предположим, что расход воды на выходе q увеличивается скачком (все начали поливать огороды). Синяя линия
на рисунке (см. ниже) показывает изменение уровня при K =1, а зеленая – при K = 5 .
∆h
0 |
t |
|
K = 5 |
K =1
По этим данным можно сделать некоторые выводы:
•при изменении нагрузки (потребления воды, потока q ) регулятор-усилитель не может поддерживать заданный уровень (графики не приходят к значению ∆h = 0 );
•чем больше К, тем меньше ошибка регулирования ∆h в установившемся режиме; можно ожидать, что при K → ∞ ошибка должна уменьшиться до нуля;
•чем больше К, тем быстрее заканчивается переход на новый режим.
Кажется, что для улучшения управления нужно увеличивать K, однако это только первое впечатление.
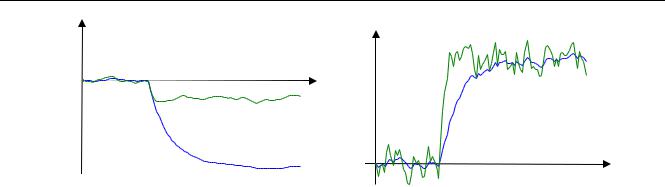
Теперь посмотрим, что будет, если есть шум измерений (случайная ошибка датчика).
18
© К.Ю. Поляков, 2008
∆h |
∆Q |
|
|
|
|
||
0 |
t |
K = 5 |
|
K =1 |
|||
K = 5 |
|
||
K =1 |
0 |
t |
По графикам видно, что при неточных измерениях уровень колеблется около некоторого среднего значения (того, что было получено без шума), причем при бóльшем K колебания увеличиваются. Этот эффект особенно хорошо виден на графике изменения расхода насоса ∆q (рису-
нок справа).
При увеличении K повышение точности (уменьшение установившейся ошибки) достигается за счет повышенной активности насоса, который все время «дергается». При этом механические части изнашиваются, и существенно уменьшается его срок службы. Поэтому коэффициент K нельзя сильно увеличивать.
Один из главных выводов этого примера: управление чаще всего связано с компромиссом. Здесь, с одной стороны, нужно увеличивать K, чтобы повысить точность, а с другой – нужно уменьшать K, чтобы уменьшить влияние шума измерения.
При выборе управления мы шли самым простым путем, остановившись на регулятореусилителе (П-регуляторе). У вдумчивого читателя неизбежно должны были возникнуть вопросы следующего характера:
•любым ли объектом можно управлять с помощью регулятора-усилителя?
•как правильно выбрать коэффициент K (на каком значении остановиться)?
•можно ли добиться улучшения управления с помощью более сложного регулятора?
•какой регулятор нужно применить, чтобы улучшить управление?
•как обеспечить нулевую установившуюся ошибку (постоянный уровень при любом расходе q ) и можно ли это сделать вообще?
•как подавить шумы измерений, чтобы они не приводили к «дерганию» насоса?
Вследующих разделах представлены основы теории автоматического управления, которая отвечает на такие вопросы и предлагает надежные методы проектирования регуляторов, решающих задачу управления в соответствии с заданными требованиями.
19
|
|
© К.Ю. Поляков, 2008 |
||||||
3. Модели линейных объектов |
|
|
|
|
|
|
|
|
3.1. Дифференциальные уравнения |
|
|
|
|
|
R |
|
|
Составляя модель объекта на основании физических за- |
|
|
|
|
|
|
||
конов, мы чаще всего получаем систему дифференциальных |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
уравнений первого и второго порядка. |
|
|
|
|
|
|
|
|
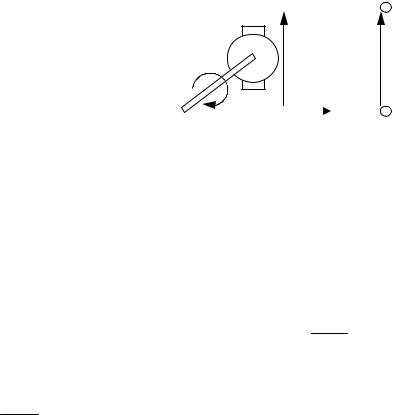
Для примера покажем, как построить модель двигателя |
ω |
|
|
e |
|
|
u |
|
|
|
|
|
|||||
постоянного тока, используя законы механики и электро- |
|
|
|
|
||||
|
|
|
||||||
техники. Вход этого объекта – напряжение якоря u(t) (в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вольтах), выход – угол поворота вала θ(t) (в радианах). |
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|||
Сначала вспомним некоторые «житейские» знания об |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
электродвигателях. Вал двигателя начинает вращаться, когда приложено напряжение питания. Если напряжение не меняется, угловая скорость вращения ω(t) (в радианах в секунду) остается
постоянной, при этом угол θ(t) равномерно увеличивается.
Чем больше напряжение, тем быстрее вращается вал. Если зажать вал рукой (или подключить нагрузку, например, заставить двигатель вращать турбину), скорость вращения постепенно уменьшается до нового значения, при котором вращающий момент двигателя будет равен моменту сопротивления (нагрузки). Пока эти моменты равны, скорость вращения остается постоянной и ее производная равна нулю.
Теперь переведем эти рассуждения на строгий язык математики. Угловая скорость враще-
ния ω(t) вычисляется как производная от угла поворота вала θ(t) , то есть ω(t) = dθdt(t) . Соот-
ветственно, угол θ(t) – это интеграл от угловой скорости. В механике уравнение вращательного движения обычно записывают в виде
J dω(t) dt
где M(t) – вращающий момент (измеряется в H·м), MH(t) – момент нагрузки (возмущение, также в H·м). Буквой J обозначен суммарный момент инерции якоря и нагрузки (в кг·м2). Величина момента инерции говорит о том, насколько легко «разогнать» двигатель (чем больше момент инерции, тем сложнее «разогнать»).
Перейдем к электротехнике. В нашем случае момент M(t) – это электромагнитный момент двигателя, который вычисляется по формуле
M (t) = CM Φ i(t) ,
где CM – коэффициент, Φ – магнитный поток, создаваемый обмоткой возбуждения (измеряется в веберах); i(t) – ток якоря (в амперах), который может быть найден из уравнения
u(t) = e(t) + R i(t) ,
где e(t) – электродвижущая сила (ЭДС) якоря (в вольтах) и R – сопротивление якорной цепи (в
омах). В свою очередь, ЭДС рассчитывается через магнитный поток и частоту вращения: e(t) = Cω Φ ω(t) ,
где Cω – коэффициент. Вводя новые постоянные k1 = CM Φ и k2 = Cω Φ, можно записать мо-
дель двигателя в виде системы уравнений |
|
|
dθ(t) |
|
|
||||
J |
dω(t) |
= k i(t) − M |
H |
(t) , e(t) = k |
2 |
ω, ω(t) = |
, u(t) = e(t) + R i(t) . |
(11) |
|
|
|
||||||||
|
dt |
1 |
|
|
dt |
|
|
||
|
|
|
|
|
|
|
|
||
Модель (11) описывает связи реальных сигналов в системе, ее внутреннее устройство.
Часто нам достаточно знать, как будет реагировать объект на заданный входной сигнал (управление). При этом его внутреннее устройство нас не очень интересует, то есть мы рас-
20