Материал: Polyakov_Tu_Metoda
|
|
|
|
|
|
|
|
|
|
|
|
|
|
© К.Ю. Поляков, 2008 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C3(s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
x |
|
|
|
|
|
|
u3 |
|
привод |
|
|
|
объект |
||
|
+ |
e |
|
|
u1 |
|
u |
|
|
|
δ |
|
|
y |
|
C2(s) |
C(s) |
|
|
R (s) |
|
|
|
P(s) |
|||||||
|
|
– |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
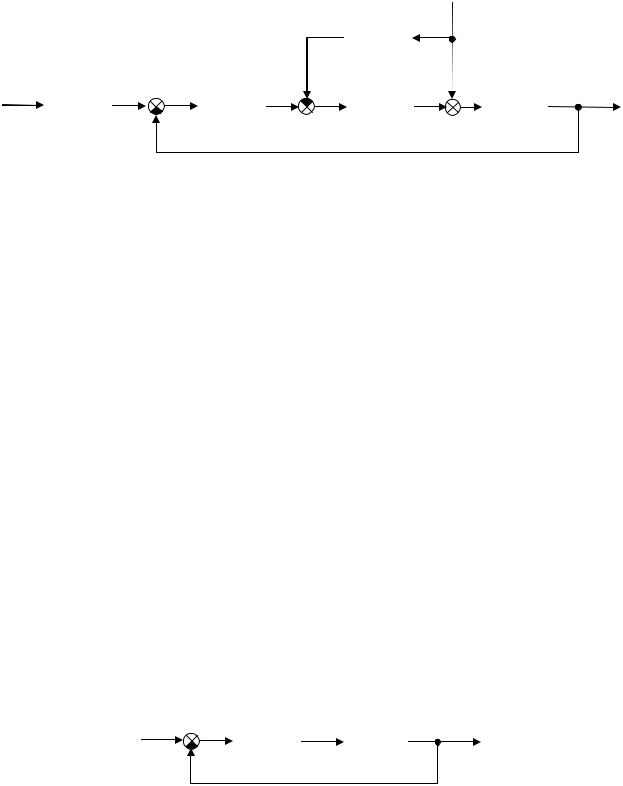
Теперь передаточная функция по возмущению равна |
|
|
|
|
|
|
|||||||||
|
|
|
|
Wg (s) = |
[1 −C3 |
(s)R(s)]P(s) |
. |
|
|
|
|
|
|||
|
|
|
|
1 |
+C(s)R(s)P(s) |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
В этом случае теоретически есть возможность обеспечить полную компенсацию возмущения g , выбрав
C (s) = |
1 |
, |
(53) |
|
|||
3 |
R(s) |
|
|
|
|
|
так что Wg (s) = 0 . Это условие называется условием инвариантности (неизменности), поскольку в этом случае система абсолютно подавляет любые возмущения по входу g . Заметим, что
мы снова пришли к идее инверсии (построения обратной системы), как и в (52).
К сожалению, на практике условие инвариантности чаще всего невыполнимо, потому что регулятор C3 (s) должен быть предсказывающим, так как нужно подать компенсирующий сиг-
нал на привод раньше, чем внешнее возмущение успеет повлиять на объект.
Чаще всего получается, что числитель передаточной функции C3 (s) (53) должен иметь
более высокую степень, чем знаменатель. Это значит, что такой регулятор включает звенья чистого дифференцирования, которые не являются физически реализуемыми. Обычно подбирают регулятор C3 (s) так, чтобы он был физически реализуемым, но условие (53) приближенно
выполнялось в наиболее важном диапазоне частот.
7.7. Множество стабилизирующих регуляторов
Как известно, не каждый регулятор стабилизирует систему. Поэтому важно выделить множество регуляторов, которые обеспечивают устойчивость замкнутого контура. Такие регуляторы называются стабилизирующими. Желательно также получить параметризацию, то есть, представить все множество стабилизирующих регуляторов в виде формулы, зависящей от параметра, который может выбираться произвольно в некоторой допустимой области.
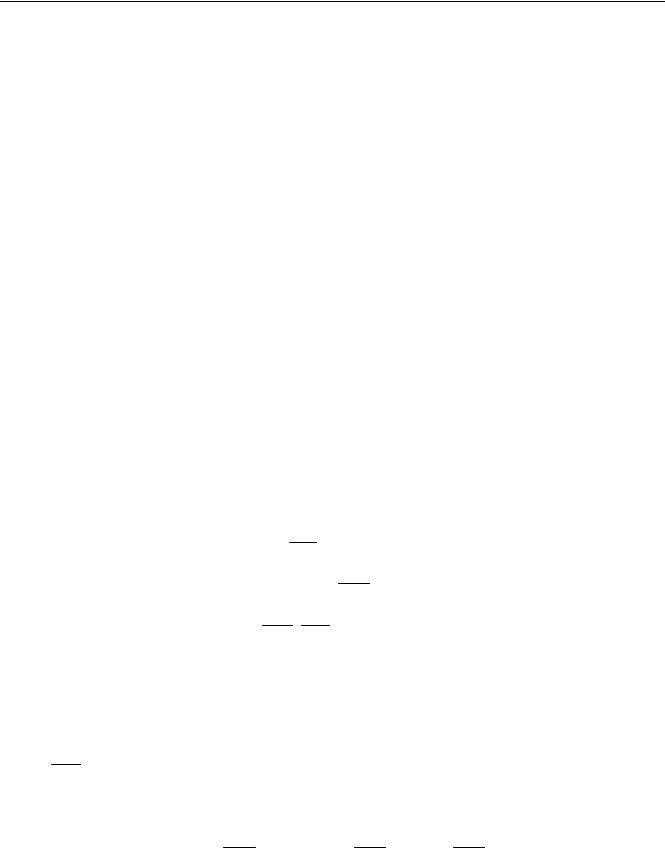
Рассмотрим простейшую замкнутую систему: |
|
|
|||||||
x + |
e |
регулятор |
u |
объект |
y |
||||
|
|
|
|
|
|
||||
C(s) |
|
|
|
P(s) |
|||||
– |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ее передаточная функция равна |
|
|
|
|
|
C(s)P(s) |
|
|
|
|
|
W (s) = |
|
|
|
. |
(54) |
||
|
1 |
+C(s)P(s) |
|||||||
|
|
|
|
|
|||||
Регулятор входит в нее нелинейно, что значительно осложняет анализ и синтез системы. Заметим, что эту функцию можно представить в виде
W (s) = Q(s)P(s) , где |
Q(s) = |
C(s) |
(55) |
1+C(s)P(s) |
76
© К.Ю. Поляков, 2008
Выражение (55) внешне выглядит как передаточная функция последовательного соединения объекта P(s) и «регулятора» Q(s) , причем оно линейно зависит от Q(s) . Поэтому естественно
возникает вопрос: нельзя ли сначала выбрать нужным образом Q(s) , а затем найти соответст-
вующий ей регулятор, выразив его передаточную функцию из (55): |
|
||
C(s) = |
Q(s) |
|
|
|
. |
(56) |
|
1−Q(s)P(s) |
|||
Очевидно, что функция Q(s) должна быть устойчивой, иначе передаточная функция замкнутой системы W (s) (55) также окажется неустойчивой. Оказывается, если объект P(s) устойчив, то
регулятор, полученный из (56), всегда будет стабилизирующим. Более того, форма (56) охватывает все возможные стабилизирующие регуляторы. Поэтому (56) – это параметризация множества стабилизирующих регуляторов для устойчивого объекта, она называется параметризаци-
ей Юла (D.C. Youla).
Параметром в (56) является устойчивая функция Q(s) , которая может выбираться произ-
вольно. На практике регулятор (56) должен быть физически реализуемым. Это значит, что передаточная функция C(s) должна быть правильной (степень ее числителя не больше степени зна-
менателя). Для этого функция Q(s) также должна быть правильной.
Теоретически для оптимального слежения нужно выбрать Q(s) =1/ P(s) , что дает W (s) =1 , однако чаще всего это невозможно. Дело в том, что передаточная функция объекта в
практических задачах – строго правильная (степень числителя меньше степени знаменателя), и Q(s) получается неправильной. Поэтому используют компромиссные решения, обеспечивая
приближенную инверсию только для наиболее важной полосы частот.
Существует множество методов синтеза, в которых устойчивая и правильная функция Q(s) выбирается в результате численной оптимизации по какому-либо критерию. Затем переда-
точная функция регулятора рассчитывается по формуле (56).
Посмотрим, что получится, если попробовать применить такой подход для неустойчивого
объекта с передаточной функцией P(s) = s 1−1 . Выбрав Q(s) =1, из (56) получаем
C(s) = ss−−12 .
При этом в произведении C(s)P(s) = ss−−12 s 1−1 неустойчивый полюс модели объекта сокраща-
ется (компенсируется) неустойчивым нулем регулятора. Характеристический полином
∆(s) = s −1+(s −2)(s −1) = (s −1)2
будет неустойчивым, как и вся замкнутая система. Следовательно, параметризацию (56) в этом случае использовать нельзя.
Для неустойчивых объектов используют другую, более сложную параметризацию. Пусть
P(s) = dn((ss)) , где n(s) и d(s) – полиномы. Выберем произвольный устойчивый полином f (s) ,
степень которого равна наибольшей из степеней n(s) и d(s) . Представим функцию P(s) в виде отношения рациональных функций
P(s) = UV ((ss)) , где U (s) = nf ((ss)) и V (s) = df ((ss)) .
Можно показать, что существуют такие правильные устойчивые функции X (s) и Y (s) , для которых выполняется равенство
U (s)X (s) +V (s)Y (s) =1. |
(57) |
Тогда множество всех стабилизирующих регуляторов описывается формулой
77
|
|
|
© К.Ю. Поляков, 2008 |
|
C(s) = |
X (s) +V (s)Q(s) |
, |
(58) |
|
Y (s) −U (s)Q(s) |
||||
|
|
|
где Q(s) – произвольная правильная устойчивая функция. Выражение (58) определяет пара-
метризацию множества стабилизирующих регуляторов (параметризацию Юла) в общем слу-
чае, даже для неустойчивых объектов. Подставив (58) в формулу (54), получаем, учитывая (57),
W (s) = [X (s) +V (s)Q(s)]U (s) .
При синтезе можно выбирать устойчивую правильную функцию Q(s) , при которой пере-
даточные функции замкнутой системы (по входу, по возмущению, по ошибке) имеют нужные свойства, а затем вычислять передаточную функцию регулятора, используя (58).
Для |
примера рассмотрим |
снова неустойчивый |
объект с передаточной функцией |
||||||||||||||||
P(s) = |
1 |
, которую можно записать в виде |
|
|
|
|
|
|
|
|
|
|
|||||||
s −1 |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
U (s) |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
s −1 |
|
||
|
|
P(s) = |
, где |
U (s) = |
|
|
, |
V (s) = |
. |
||||||||||
|
|
|
s |
+1 |
|
||||||||||||||
|
|
|
V (s) |
|
|
|
|
|
|
|
|
|
s +1 |
||||||
Решением уравнения (57) может быть, например, такая пара устойчивых функций |
|||||||||||||||||||
|
|
|
|
X (s) = |
|
|
4 |
|
, Y (s) = |
s +3 |
. |
||||||||
|
|
|
|
|
s |
+1 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
s +1 |
|||||||
При выборе Q(s) =1 по формуле (58) получаем |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
C(s) = |
s +3 |
. |
|
|
|
|
|
||||||
Теперь в произведении C(s)P(s) |
|
|
s + 2 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
нет никаких сокращений, система устойчива. |
|||||||||||||||||||
78

© К.Ю. Поляков, 2008
Заключение
Шаг за шагом, мы рассмотрели основные понятия классической теории автоматического управления. Нужно понимать, что вы прочитали не учебник, а небольшое введение, призванное познакомить с основными понятиями и дать общее представление о предмете. Тот, кто серьезно собирается изучать методы теории управления и использовать их в своей работе, должен продолжить изучение, взяв «нормальные» учебники (см. список литературы), в которых эти и другие вопросы изложены значительно более строго и научно.
За рамками пособия остались многие темы, с которыми должен быть знаком современный специалист по автоматическому управлению. Достаточно сказать, что мы рассмотрели только линейные непрерывные системы, тогда как практически все реальные системы содержат нелинейности и управляются цифровыми регуляторами, то есть являются непрерывно-дискретными.
При проектировании обязательно должны учитываться случайные воздействия, которые не обсуждались в пособии. Внедрение цифровых компьютеров позволило использовать адаптивные системы со сложными алгоритмами управления, требующими объемных вычислений. Развиваются и новые классы систем, в которых для управления используется методы искусственного интеллекта и теории нечетких множеств.
Автор будет считать свою задачу выполненной, если читатель почувствует в себе силы не остановиться на достигнутом и продолжить самообразование.
79

© К.Ю. Поляков, 2008
Литература для последующего чтения
(в порядке увеличения количества страниц)
1.Попов Е.П. Теория линейных систем автоматического регулирования и управления. М.:
Наука, 1989.
2.Мирошник И.В. Теория автоматического управления. Линейные системы. СПб.: Питер, 2005.
3.Первозванский А.А. Курс теории автоматического управления – М.: Наука, 1986.
4.Бесекерский В.А., Попов Е.П. Теория систем автоматического управления – 4-е изд. СПб.: Профессия, 2003.
5.Дорф Р., Бишоп Р. Современные системы управления – М.: Бином, Лаборатория базовых знаний, 2004.
6.Гудвин Г.К., Гребе С.Ф., Сальгадо М.Э. Проектирование систем управления. М.: Бином, Лаборатория базовых знаний, 2004.
80