Материал: Polyakov_Tu_Metoda
© К.Ю. Поляков, 2008
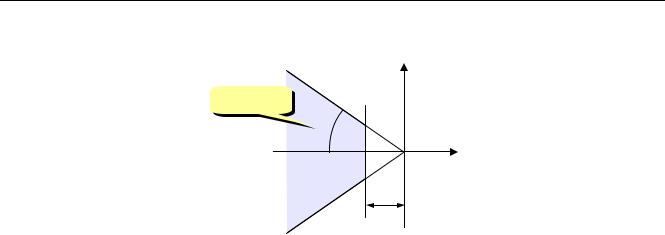
устойчивости не меньше заданной ηmin ) и колебательность не выше заданной µmax . Эти условия определяют усеченный сектор на комплексной плоскости.
Im
µmax = tgα
α
Re
ηmin
6.9.Робастность
6.9.1.Что такое робастность?
Обычно регулятор строится на основе некоторых приближенных (номинальных) моделей объекта управления (а также приводов и датчиков) и внешних возмущений. При этом поведение реального объекта и характеристики возмущений могут быть несколько иными. Поэтому требуется, чтобы разработанный регулятор обеспечивал устойчивость и приемлемое качество системы при малых отклонениях свойств объекта и внешних возмущений от номинальных моделей. В современной теории управления это свойство называют робастностью (грубостью). Иначе его можно назвать нечувствительностью к малым ошибкам моделирования объекта и возмущений.
Различают несколько задач, связанных с робастностью:
•робастная устойчивость – обеспечить устойчивость системы при всех допустимых отклонениях модели объекта от номинальной;
•робастное качество – обеспечить устойчивость и заданные показатели качества систе-
мы при всех допустимых отклонениях модели объекта от номинальной;
•гарантирующее управление – обеспечить заданные показатели качества системы при всех допустимых отклонениях модели возмущения от номинальной (считая, что модель объекта известна точно).
Для того, чтобы исследовать робастность системы, нужно как-то определить возможную ошибку моделирования (неопределенность). Ее можно задать различными способами.
6.9.2. Параметрическая неопределенность
Параметрическая неопределенность означает, что структура модели известна, а параметры могут отличаться от номинальных, например:
P(s) = |
|
k0 +ε1 |
, |
||
(T |
+ε |
2 |
)s +1 |
||
0 |
|
|
|
||
где k0 и T0 – номинальные значения коэффициента усиления и постоянной времени, а ε1 и ε2 –
малые ошибки моделирования.
Предположим, что такой объект управляется регулятором-усилителем с передаточной функцией C(s) = K . Тогда характеристический полином замкнутой системы принимает вид
∆(s) = (T0 +ε2 )s +1+ K (k0 +ε1 ) .
Робастный регулятор должен обеспечивать устойчивость этого полинома при всех допустимых ε1 и ε2 . В данном случае условия устойчивости сводятся к тому, что коэффициенты полинома,
T0 +ε2 и 1 + K (k0 +ε1) , имеют одинаковый знак (оба положительные или оба отрицательные). Будем считать, что k0 > 0 и T0 > 0 , а отклонения ε1 и ε2 малы в сравнении с k0 и T0 соответст-
66
© К.Ю. Поляков, 2008
венно. Таким образом, T0 +ε2 > 0 при всех возможных ε2 . Следовательно, замкнутая система устойчива при
1+ K (k0 |
+ε1 ) > 0 K > |
|
−1 |
. |
k0 |
|
|||
|
|
+ε1 |
||
Наибольшее значение в правой части последнего неравенства будет при максимальном значении ε1 , поэтому условие робастной устойчивости принимает вид
K > Kmin = k0 +−ε11max .
Таким образом, любой регулятор-усилитель, имеющий коэффициент усиления K > Kmin , обеспечивает робастную устойчивость системы в том смысле, что устойчивость сохраняется при всех допустимых ошибках ε1 и ε2 .
В более сложных случаях часто используют теорему Харитонова, которая позволяет проверить робастную устойчивость характеристического полинома
∆(s) = a0 +a1s +K+an sn−1 +an sn ,
где коэффициенты a0 , a1,K, an точно неизвестны, но принадлежат интервалам
li < ai < ui (i =1,K, n) .
Оказывается, полином ∆(s) устойчив при всех возможных значениях коэффициентов тогда и только тогда, когда устойчивы четыре полинома Харитонова:
∆1(s) = l0 + l1s +u2s2 +u3s3 + l4s4 + l5s5 +K
∆2 (s) = u0 +u1s + l2s2 + l3s3 +u4s4 +u5s5 +K
∆3 (s) = l0 +u1s +u2s2 + l3s3 + l4s4 +u5s5 +K
∆4 (s) = u0 + l1s + l2s2 +u3s3 +u4s4 + l5s5 +K
Таким образом, для проверки устойчивости бесконечного числа возможных характеристических полиномов достаточно проверить устойчивость четырех полиномов Харитонова.
6.9.3. Непараметрическая неопределенность
Непараметрическая неопределенность задает допустимую ошибку в частотной области, то есть ошибку в частотных характеристиках. Для номинальной модели P0 ( jω) различают адди-
тивную неопределенность (абсолютную ошибку) ∆a ( jω) :
P( jω) = P0 ( jω) + ∆a ( jω)
и мультипликативную неопределенность (относительную ошибку) ∆m ( jω) :
P( jω) = [1+∆m ( jω)]P0 ( jω) .
Для мультипликативной неопределенности известен очень простой критерий робастной устойчивости: система с регулятором C(s) и номинальный объектом P0 (s) робастно устойчи-
ва, если для любой частоты ω выполняется неравенство
W0 ( jω) ∆m ( jω) |
|
<1, |
(50) |
|
где W0 (s) – передаточная функция номинальной замкнутой системы:
W0 |
(s) = |
|
|
C(s) P0 |
(s) |
. |
|
1 |
+C(s) P0 (s) |
||||||
|
|
|
|||||
Этот результат называется теоремой о малом коэффициенте усиления. При этом также требуется, чтобы реальная и номинальная модели объекта, P(s) и P0 (s) , имели одинаковые неустой-
чивые полюса, то есть неопределенность не должна вносить новые источники неустойчивости.
67

© К.Ю. Поляков, 2008
Условие (50) – это достаточное условие робастной устойчивости, то есть, его выполнение гарантирует устойчивость, но для некоторых робастно устойчивых систем оно может не выполняться.
Обычно модель строится так, чтобы хорошо описывать свойства реального объекта на низких частотах, а для высоких частот ошибка моделирования ∆m ( jω) может быть значитель-
ной. Тогда, учитывая (50), можно сделать вывод, что с точки зрения робастной устойчивости значение W0 ( jω) должно быть мало на высоких частотах, где велика неопределенность модели.
68
© К.Ю. Поляков, 2008
7. Синтез регуляторов
7.1. Классическая схема
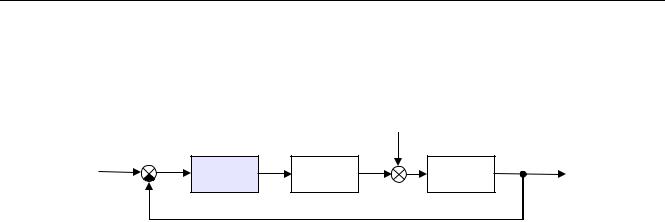
Чаще всего регулятор включается перед объектом, как показано на схеме:
x + |
|
регулятор |
привод |
g |
объект |
e |
u |
δ |
|
y |
|
– |
|
C(s) |
R (s) |
|
P(s) |
|
|
|
|
|
Задача системы управления состоит в том, чтобы подавить действие внешнего возмущения g и обеспечить быстрые и качественные переходные процессы. К сожалению, эти задачи
часто противоречивы. Фактически нам нужно скорректировать систему так, чтобы она имела нужные передаточные функции по возмущению (Wg (s) , от входаg к выходу y ) и по задающе-
му воздействию (W (s) , от входаx к выходу y ) |
|
|
|
|
|
|||||
Wg (s) = |
|
|
P(s) |
, |
W (s) = |
|
|
C(s)R(s)P(s) |
. |
|
1 |
+C(s)R(s)P(s) |
1 |
+C(s)R(s)P(s) |
|||||||
|
|
|
|
|||||||
Для этого мы можем использовать только один регулятор C(s) , поэтому такую систему назы-
вают системой с одной степенью свободы.
Легко проверить, что эти две передаточные функции связаны равенством
Wg (s) = [1 −W (s)]P(s) .
Поэтому, изменяя одну из передаточных функций, мы автоматически меняем и вторую. Таким образом, их невозможно сформировать независимо и решение всегда будет некоторым компро-
миссом.
Посмотрим, можно ли в такой системе обеспечить нулевую ошибку, то есть, абсолютно точное отслеживание входного сигнала. Передаточная функция по ошибке (от входа x(t) к
ошибке e(t) ) равна |
|
|
|
|
|
We (s) = |
|
|
1 |
. |
|
1 |
+C(s)R(s)P(s) |
||||
|
|
||||
Для того, чтобы ошибка всегда была нулевой, требуется, чтобы эта передаточная функция была равна нулю. Поскольку ее числитель – не нуль, сразу получаем, что знаменатель должен обращаться в бесконечность. Мы может влиять только на регулятор C(s) (остальные элементы за-
даны заранее), поэтому получаем C(s) → ∞. Таким образом, для уменьшения ошибки нужно
увеличивать коэффициент усиления регулятора. Это так называемый принцип глубокой обратной связи.
Однако нельзя увеличивать усиление до бесконечности. Во-первых, все реальные устройства имеют предельно допустимые значения входных и выходных сигналов. Во-вторых, при большом усилении контура ухудшается качество переходных процессов, усиливается влияние возмущений и шумов, система может потерять устойчивость. Поэтому в схеме с одной степенью свободы обеспечить нулевую ошибку слежения невозможно.
Посмотрим на задачу с точки зрения частотных характеристик. С одной стороны, для качественного отслеживания задающего сигнала x(t) желательно, чтобы частотная характеристи-
ка W ( jω) была примерно равна 1 (в этом случае y(t) ≈ x(t) ). С другой стороны, с точки зрения робастной устойчивости нужно обеспечить W ( jω) ≈ 0 на высоких частотах, где ошибка моделирования велика. Кроме того, передаточная функция по возмущению должна быть такой, чтобы эти возмущения подавлять, в идеале мы должны обеспечить Wg ( jω) ≈ 0 .
69

© К.Ю. Поляков, 2008
Выбирая компромиссное решение, обычно поступают следующим образом:
1)на низких частотах добиваются выполнения условия W ( jω) ≈1, что обеспечивает хорошее слежение за низкочастотными сигналами; при этом Wg ( jω) ≈ 0 , то есть, низкочастотные возмущения подавляются;
2)на высоких частотах стремятся сделать W ( jω) ≈ 0 , чтобы обеспечить робастную устойчивость и подавление шума измерений; при этом Wg ( jω) ≈ P( jω) , то есть система фактически работает как разомкнутая, регулятор не реагирует на высокочастотные помехи.
7.2.ПИД-регуляторы
Несмотря на развитые современные методы проектирования сложных регуляторов, подавляющее большинство промышленных систем управления основаны на регуляторах первого и второго порядка. Эти регуляторы во многих случаях могут обеспечить приемлемое управление, легко настраиваются и дешевы при массовом изготовлении.
Простейший регулятор – пропорциональный или П-регулятор – это простой усилитель с передаточной функцией C(s) = K . Его выход – это ошибка управления e(t) , умноженная на ко-
эффициент K . С помощью П-регулятора можно управлять любым устойчивым объектом, однако он дает относительно медленные переходные процессы и ненулевую статическую ошибку.
Чтобы убрать статическую ошибку в установившемся режиме, в регулятор вводят интегральный канал с коэффициентом усиления KI , так что
C(s) = K + |
KI |
, |
u(t) = Ke(t) + KI ∫t |
e(t) dt . |
|
||||
|
s |
0 |
|
|
Такой регулятор называется пропорционально-интегральным или ПИ-регулятором. Интегратор выдает сигнал, пропорциональный накопленной ошибке, поэтому переходный процесс несколько замедляется. Однако за счет интегрального канала обеспечивается нулевая ошибка в установившемся состоянии при ступенчатом возмущении и ступенчатом изменении задающего сигнала-уставки.
Для ускорения переходных процессов добавляют дифференциальный канал с коэффициентом усиления KD :
C(s) = K + |
KI + KD s , |
u(t) = Ke(t) + KI ∫t e(t) dt + KD |
de(t) . |
|
s |
0 |
dt |
Такой регулятор называется ПИД-регулятором (пропорционально-интегрально- дифференциальный). Регуляторы этого типа очень хорошо зарекомендовали себя в практических задачах. Кроме того, иногда используются ПД-регуляторы (пропорциональнодифференциальные), у которых нет интегрального канала.
Управление по производной – это быстрый способ управления. Сигнал дифференциального канала наиболее важен при изменениях входов и исчезает в установившемся режиме. Он позволяет реагировать не на само увеличение ошибки, а на тенденцию ее изменения, и принять «превентивные меры». Главный недостаток дифференциального канала – большое влияние высокочастотных помех, например, шумов измерений. Для того, чтобы сделать регулятор физически реализуемым, вместо чистого дифференцирования используют инерционное дифференцирующее звено:
C(s) = K + |
KI + |
KD s |
|
, |
|
T s + |
1 |
||||
|
s |
|
|||
|
|
D |
|
|
где TD – малая постоянная времени. Чем меньше TD , тем в большем частотном диапазоне вы-
полняется точное дифференцирование, но сильнее влияют высокочастотные помехи.
Для устойчивого объекта можно выбрать коэффициенты регулятора опытным путем, выполняя эксперименты с реальным объектом. Предложено несколько методов решения этой задачи, например, правила Зиглера-Никольса или Коэна-Куна.
70