Материал: Polyakov_Tu_Metoda
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДЛЯ «ЧАЙНИКОВ»
К.Ю. Поляков
Санкт-Петербург
2008

© К.Ю. Поляков, 2008
«В ВУЗе нужно излагать материал на высоком профессиональном уровне. Но поскольку этот уровень проходит значительно выше головы среднего студента, я буду объяснять на пальцах. Это не очень профессионально, зато понятно».
Неизвестный преподаватель
Предисловие
Эта методичка предназначена для первого знакомства с предметом. Ее задача – объяснить «на пальцах» основные понятия теории автоматического регулирования и сделать так, чтобы после ее прочтения вы смогли воспринимать профессиональную литературу на эту тему. Нужно рассматривать это пособие только как фундамент, стартовую площадку для серьезного изучения серьезного предмета, который может стать очень интересным и увлекательным.
Есть сотни учебников по автоматическому управлению. Но вся проблема в том, что мозг при восприятии новой информации ищет что-то знакомое, за что можно «зацепиться», и на этой основе «привязать» новое к уже известным понятиям. Практика показывает, что читать серьезные учебники современному студенту сложно. Не за что зацепиться. Да и за строгими научными доказательствами часто ускользает суть дела, которая обычно достаточно проста. Автор попытался «спуститься» на уровень ниже и выстроить цепочку от «житейских» понятий к понятиям теории управления.
Изложение на каждом шагу грешит нестрогостью, доказательства не приводятся, формулы используются только там, где без них нельзя. Математик найдет здесь много недоговоренностей и упущений, поскольку (в соответствии с целями пособия) между строгостью и понятностью выбор всегда делается в пользу понятности.
От читателя требуются небольшие предварительные знания. Нужно иметь представление
онекоторых разделах курса высшей математики:
1)производных и интегралах;
2)дифференциальных уравнениях;
3)линейной алгебре, матрицах;
4)комплексных числах.
Благодарности
Автор выражает глубокую признательность д.ф.-м.н. А.Н. Чурилову, к.т.н. В.Н. Калиниченко и к.т.н. В.О. Рыбинскому, которые внимательно прочитали предварительную версию пособия и высказали много ценных замечаний, которые позволили улучшить изложение и сделать его более понятным.
2

© К.Ю. Поляков, 2008
Содержание
1. |
ОСНОВНЫЕ ПОНЯТИЯ ....................................................................................................................................... |
4 |
|
|
1.1. |
Введение................................................................................................................................................. |
4 |
|
1.2. |
Системы управления............................................................................................................................. |
4 |
|
1.3. Какие бывают системы управления? ................................................................................................. |
7 |
|
2. |
МАТЕМАТИЧЕСКИЕ МОДЕЛИ .......................................................................................................................... |
10 |
|
|
2.1. Что нужно знать для управления? ................................................................................................... |
10 |
|
|
2.2. Связь входа и выхода........................................................................................................................... |
10 |
|
|
2.3. |
Как строятся модели? ....................................................................................................................... |
11 |
|
2.4. |
Линейность и нелинейность .............................................................................................................. |
12 |
|
2.5. |
Линеаризация уравнений..................................................................................................................... |
13 |
|
2.6. |
Управление........................................................................................................................................... |
17 |
3. МОДЕЛИ ЛИНЕЙНЫХ ОБЪЕКТОВ ..................................................................................................................... |
20 |
||
|
3.1. |
Дифференциальные уравнения........................................................................................................... |
20 |
|
3.2. Модели в пространстве состояний .................................................................................................. |
21 |
|
|
3.3. |
Переходная функция............................................................................................................................ |
22 |
|
3.4. |
Импульсная характеристика (весовая функция) ............................................................................. |
24 |
|
3.5. |
Передаточная функция....................................................................................................................... |
25 |
|
3.6. |
Преобразование Лапласа.................................................................................................................... |
26 |
|
3.7. Передаточная функция и пространство состояний....................................................................... |
29 |
|
|
3.8. |
Частотные характеристики ............................................................................................................ |
31 |
|
3.9. |
Логарифмические частотные характеристики.............................................................................. |
32 |
4. ТИПОВЫЕ ДИНАМИЧЕСКИЕ ЗВЕНЬЯ................................................................................................................ |
34 |
||
|
4.1. |
Усилитель ............................................................................................................................................ |
34 |
|
4.2. |
Апериодическое звено.......................................................................................................................... |
34 |
|
4.3. |
Колебательное звено........................................................................................................................... |
36 |
|
4.4. |
Интегрирующее звено......................................................................................................................... |
38 |
|
4.5. |
Дифференцирующие звенья................................................................................................................ |
39 |
|
4.6. |
Запаздывание....................................................................................................................................... |
40 |
|
4.7. |
«Обратные» звенья............................................................................................................................. |
41 |
|
4.8. |
ЛАФЧХ сложных звеньев................................................................................................................... |
42 |
5. |
СТРУКТУРНЫЕ СХЕМЫ.................................................................................................................................... |
43 |
|
|
5.1. |
Условные обозначения ........................................................................................................................ |
43 |
|
5.2. |
Правила преобразования..................................................................................................................... |
44 |
|
5.3. |
Типовая одноконтурная система...................................................................................................... |
45 |
6. |
АНАЛИЗ СИСТЕМ УПРАВЛЕНИЯ ...................................................................................................................... |
47 |
|
|
6.1. |
Требования к управлению.................................................................................................................... |
47 |
|
6.2. |
Процесс на выходе............................................................................................................................... |
47 |
|
6.3. |
Точность.............................................................................................................................................. |
48 |
|
6.4. |
Устойчивость ..................................................................................................................................... |
50 |
|
6.5. |
Критерии устойчивости.................................................................................................................... |
57 |
|
6.6. |
Переходный процесс............................................................................................................................ |
62 |
|
6.7. |
Частотные оценки качества............................................................................................................. |
63 |
|
6.8. |
Корневые оценки качества................................................................................................................. |
65 |
|
6.9. |
Робастность....................................................................................................................................... |
66 |
7. |
СИНТЕЗ РЕГУЛЯТОРОВ .................................................................................................................................... |
69 |
|
|
7.1. |
Классическая схема............................................................................................................................. |
69 |
|
7.2. |
ПИД-регуляторы................................................................................................................................. |
70 |
|
7.3. |
Метод размещения полюсов .............................................................................................................. |
71 |
|
7.4. |
Коррекция ЛАФЧХ.............................................................................................................................. |
72 |
|
7.5. |
Комбинированное управление............................................................................................................. |
75 |
|
7.6. |
Инвариантность................................................................................................................................. |
75 |
|
7.7. |
Множество стабилизирующих регуляторов................................................................................... |
76 |
ЗАКЛЮЧЕНИЕ.......................................................................................................................................................... |
79 |
||
ЛИТЕРАТУРА ДЛЯ ПОСЛЕДУЮЩЕГО ЧТЕНИЯ.......................................................................................................... |
80 |
||
3
© К.Ю. Поляков, 2008
1. Основные понятия
1.1. Введение
С древних времен человек хотел использовать предметы и силы природы в своих целях, то есть управлять ими. Управлять можно неодушевленными предметами (например, перекатывая камень на другое место), животными (дрессировка), людьми (начальник – подчиненный). Множество задач управления в современном мире связано с техническими системами – автомобилями, кораблями, самолетами, станками. Например, нужно поддерживать заданный курс корабля, высоту самолета, частоту вращения двигателя, температуру в холодильнике или в печи. Если эти задачи решаются без участия человека, говорят об автоматическом управлении.
Теория управления пытается ответить на вопрос «как нужно управлять?». До XIX века науки об управлении не существовало, хотя первые системы автоматического управления уже были (например, ветряные мельницы «научили» разворачиваться навстречу ветру). Развитие теории управления началось в период промышленной революции. Сначала это направление в науке разрабатывалось механиками для решения задач регулирования, то есть поддержания заданного значения частоты вращения, температуры, давления в технических устройствах (например, в паровых машинах). Отсюда происходит название «теория автоматического регулирования».
Позднее выяснилось, что принципы управления можно успешно применять не только в технике, но и в биологии, экономике, общественных науках. Процессы управления и обработки информации в системах любой природы изучает наука кибернетика. Один из ее разделов, связанный главным образом с техническими системами, называется теорией автоматического управления. Кроме классических задач регулирования, она занимается также оптимизацией законов управления, вопросами приспособляемости (адаптации).
Иногда названия «теория автоматического управления» и «теория автоматического регулирования» используются как синонимы. Например, в современной зарубежной литературе вы встретите только один термин – control theory.
1.2. Системы управления
1.2.1.Из чего состоит система управления?
Взадачах управления всегда есть два объекта – управляемый и управляющий. Управляемый объект обычно называют объектом управления или просто объектом, а управляющий объект – регулятором. Например, при управлении частотой вращения объект управления – это двигатель (электромотор, турбина); в задаче стабилизации курса корабля – корабль, погруженный в воду; в задаче поддержания уровня громкости – дина-
мик. |
|
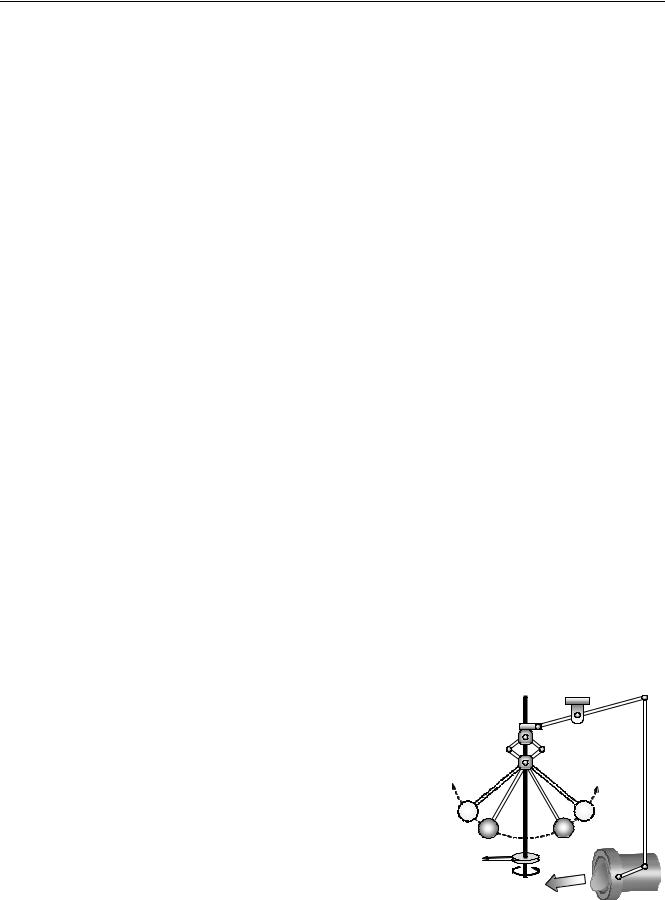
Регуляторы могут быть построены на разных принципах. |
|
Самый знаменитый из первых механических регуляторов – |
|
центробежный регулятор Уатта для стабилизации частоты |
|
вращения паровой турбины (на рисунке справа). Когда частота |
|
вращения увеличивается, шарики расходятся из-за увеличения |
|
центробежной силы. При этом через систему рычагов немного |
|
закрывается заслонка, уменьшая поток пара на турбину. |
|
Регулятор температуры в холодильнике или термостате – |
|
это электронная схема, которая включает режим охлаждения |
|
(или нагрева), если температура становится выше (или ниже) |
пар на |
заданной. |
турбину |
Во многих современных системах регуляторы – это микропроцессорные устройства, ком- |
|
пьютеры. Они успешно управляют самолетами и космическими кораблями без участия челове- |
|
4
© К.Ю. Поляков, 2008
ка. Современный автомобиль буквально «напичкан» управляющей электроникой, вплоть до бортовых компьютеров.
Обычно регулятор действует на объект управления не прямо, а через исполнительные механизмы (приводы), которые могут усиливать и преобразовывать сигнал управления, например, электрический сигнал может «превращаться» в перемещение клапана, регулирующего расход топлива, или в поворот руля на некоторый угол.
Чтобы регулятор мог «видеть», что фактически происходит с объектом, нужны датчики. С помощью датчиков чаще всего измеряются те характеристики объекта, которыми нужно управлять. Кроме того, качество управления можно улучшить, если получать дополнительную информацию – измерять внутренние свойства объекта.
1.2.2. Структура системы
Итак, в типичную систему управления входят объект, регулятор, привод и датчики. Однако, набор этих элементов – еще не система. Для превращения в систему нужны каналы связи, через них идет обмен информацией между элементами. Для передачи информации могут использоваться электрический ток, воздух (пневматические системы), жидкость (гидравлические системы), компьютерные сети.
Взаимосвязанные элементы – это уже система, которая обладает (за счет связей) особыми свойствами, которых нет у отдельных элементов и любой их комбинации.
Основная интрига управления связана с тем, что на объект действует окружающая среда – внешние возмущения, которые «мешают» регулятору выполнять поставленную задачу. Большинство возмущений заранее непредсказуемы, то есть носят случайный характер.
Кроме того, датчики измеряют параметры не точно, а с некоторой ошибкой, пусть и малой. В этом случае говорят о «шумах измерений» по аналогии с шумами в радиотехнике, которые искажают сигналы.
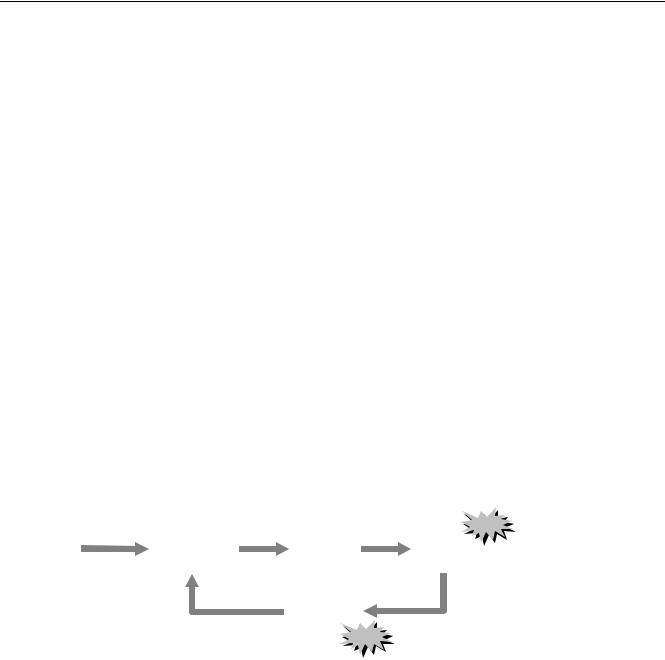
Подводя итого, можно нарисовать структурную схему системы управления так:
задание |
|
|
управление |
|
|
внешние |
||||
|
|
|
|
|
|
|
|
|
||
регулятор |
|
|
|
привод |
|
|
объект |
|
возмущения |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
обратная |
|
|
датчики |
|
|
|
|
||
|
|
|
|
|
|
шумы |
|
|||
|
|
|
|
|
|
|
||||
|
связь |
|
|
|
|
|
измерений |
|
||
Например, в системе управления курсом корабля
•объект управления – это сам корабль, находящийся в воде; для управления его курсом используется руль, изменяющий направление потока воды;
•регулятор – цифровая вычислительная машина;
•привод – рулевое устройство, которое усиливает управляющий электрический сигнал и преобразует его в поворот руля;
•датчики – измерительная система, определяющая фактический курс;
•внешние возмущения – это морское волнение и ветер, отклоняющие корабль от заданного курса;
•шумы измерений – это ошибки датчиков.
Информация в системе управления как бы «ходит по кругу»: регулятор выдает сигнал
управления на привод, который воздействует непосредственно на объект; затем информация об объекте через датчики возвращается обратно к регулятору и все начинается заново. Говорят, что в системе есть обратная связь, то есть регулятор использует информацию о состоянии объекта для выработки управления. Системы с обратной связью называют замкнутыми, поскольку информация передается по замкнутому контуру.
5
Смотрите также:
| 3. Асептика |