Материал: Polyakov_Tu_Metoda
© К.Ю. Поляков, 2008
1.2.3. Как работает регулятор?
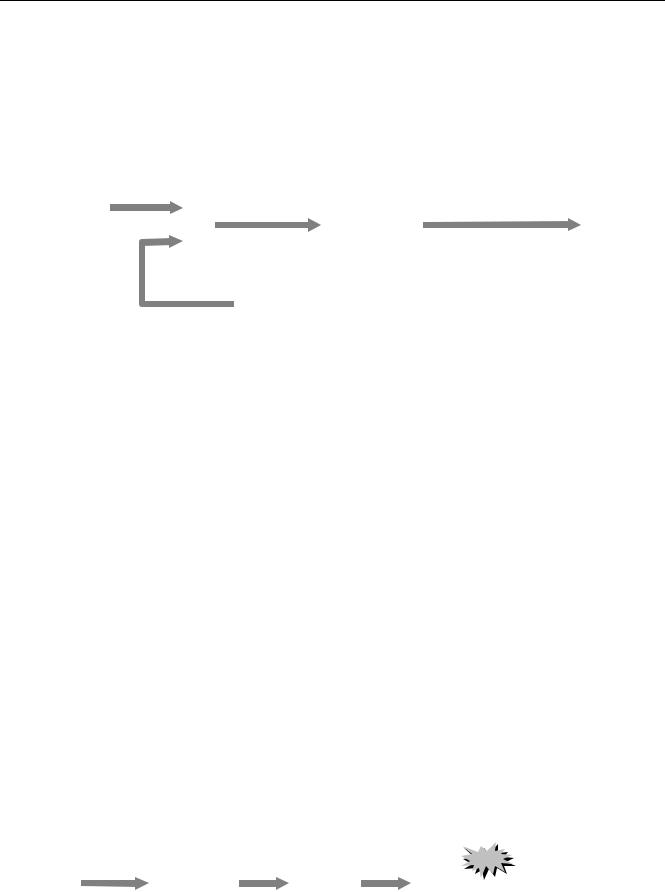
Регулятор сравнивает задающий сигнал («задание», «уставку», «желаемое значение») с сигналами обратной связи от датчиков и определяет рассогласование (ошибку управления) – разницу между заданным и фактическим состоянием. Если оно равно нулю, никакого управления не требуется. Если разница есть, регулятор выдает управляющий сигнал, который стремится свести рассогласование к нулю. Поэтому схему регулятора во многих случаях можно нарисовать так:
задание |
|
рассогласование |
|
|
|
|
|
|
|
≠ |
(ошибка) |
|
алгоритм |
|
управление |
|
|
|
|
|
|
||
|
|
|
|
управления |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
обратная связь
Такая схема показывает управление по ошибке (или по отклонению). Это значит, что для того, чтобы регулятор начал действовать, нужно, чтобы управляемая величина отклонилась от заданного значения. Блок, обозначенный знаком ≠ , находит рассогласование. В простейшем случае в нем из заданного значения вычитается сигнал обратной связи (измеренное значение).
Можно ли управлять объектом так, чтобы не было ошибки? В реальных системах – нет. Прежде всего, из-за внешних воздействий и шумов, которые заранее неизвестны. Кроме того, объекты управления обладают инерционностью, то есть, не могут мгновенно перейти из одного состояния в другое. Возможности регулятора и приводов (то есть мощность сигнала управления) всегда ограничены, поэтому быстродействие системы управления (скорость перехода на новый режим) также ограничена. Например, при управлении кораблем угол перекладки руля обычно не превышает 30 −35°, это ограничивает скорость изменения курса.
Мы рассмотрели вариант, когда обратная связь используется для того, чтобы уменьшить разницу между заданным и фактическим состоянием объекта управления. Такая обратная связь называется отрицательной, потому что сигнал обратной связи вычитается из задающего сигнала. Может ли быть наоборот? Оказывается, да. В этом случае обратная связь называется положительной, она увеличивает рассогласование, то есть, стремится «раскачать» систему. На практике положительная обратная связь применяется, например, в генераторах для поддержания незатухающих электрических колебаний.
1.2.4. Разомкнутые системы
Можно ли управлять, не используя обратную связь? В принципе, можно. В этом случае регулятор не получает никакой информации о реальном состоянии объекта, поэтому должно быть точно известно, как этот объект себя ведет. Только тогда можно заранее рассчитать, как им нужно управлять (построить нужную программу управления). Однако при этом нельзя гарантировать, что задание будет выполнено. Такие системы называют системами программного управления или разомкнутыми системами, поскольку информация передается не по замкнутому контуру, а только в одном направлении.
программа |
|
управление |
|
внешние |
||
|
|
|
|
|
||
регулятор |
|
привод |
|
объект |
возмущения |
|
|
|
|
||||
|
|
|
|
|||
|
|
|
|
|
|
|
Слепой и глухой водитель тоже может вести машину. Некоторое время. Пока он помнит дорогу и сможет правильно рассчитать свое место. Пока на пути не встретятся пешеходы или другие машины, о которых он заранее не может знать. Из этого простого примера ясно, что без
6

© К.Ю. Поляков, 2008
обратной связи (информации с датчиков) невозможно учесть влияние неизвестных факторов, неполноту наших знаний.
Несмотря на эти недостатки, разомкнутые системы применяются на практике. Например, информационное табло на вокзале. Или простейшая система управления двигателем, в которой не требуется очень точно поддерживать частоту вращения. Однако с точки зрения теории управления разомкнутые системы малоинтересны, и мы не будем больше про них вспоминать.
1.3. Какие бывают системы управления?
Автоматическая система – это система, работающая без участия человека. Есть еще автоматизированные системы, в которых рутинные процессы (сбор и анализ информации) выполняет компьютер, но управляет всей системой человек-оператор, который и принимает решения. Мы будем далее изучать только автоматические системы.
1.3.1. Задачи систем управления
Автоматические системы управления применяются для решения трех типов задач:
•стабилизация, то есть поддержание заданного режима работы, который не меняется длительное время (задающий сигнал – постоянная, часто нуль);
•программное управление – управление по заранее известной программе (задающий сигнал меняется, но заранее известен);
•слежение за неизвестным задающим сигналом.
Ксистемам стабилизации относятся, например, авторулевые на кораблях (поддержание заданного курса), системы регулирования частоты вращения турбин. Системы программного управления широко используются в бытовой технике, например, в стиральных машинах. Следящие системы служат для усиления и преобразования сигналов, они применяются в приводах и при передаче команд через линии связи, например, через Интернет.
1.3.2. Одномерные и многомерные системы
По количеству входов и выходов бывают
•одномерные системы, у которых один вход и один выход (они рассматриваются в так называемой классической теории управления);
•многомерные системы, имеющие несколько входов и./или выходов (главный предмет изучения современной теории управления).
Мы будем изучать только одномерные системы, где и объект, и регулятор имеют один входной и один выходной сигнал. Например, при управлении кораблем по курсу можно считать, что есть одно управляющее воздействие (поворот руля) и одна регулируемая величина (курс).
Однако, в самом деле это не совсем верно. Дело в том, что при изменении курса меняется также крен и дифферент корабля. В одномерной модели мы пренебрегаем этими изменениями, хотя они могут быть очень существенными. Например, при резком повороте крен может достигнуть недопустимого значения. С другой стороны, для управления можно использовать не только руль, но и различные подруливающие устройства, стабилизаторы качки и т.п., то есть объект имеет несколько входов. Таким образом, реальная система управления курсом – многомерная.
Исследование многомерных систем – достаточно сложная задача и выходит за рамки этого пособия. Поэтому в инженерных расчетах стараются иногда упрощенно представить многомерную систему как несколько одномерных, и довольно часто такой метод приводит к успеху.
1.3.3. Непрерывные и дискретные системы
По характеру сигналов системы могут быть
•непрерывными, в которых все сигналы – функции непрерывного времени, определенные на некотором интервале;
•дискретными, в которых используются дискретные сигналы (последовательности чисел), определенные только в отдельные моменты времени;
7

© К.Ю. Поляков, 2008
• непрерывно-дискретными, в которых есть как непрерывные, так и дискретные сигналы. Непрерывные (или аналоговые) системы обычно описываются дифференциальными уравнениями. Это все системы управления движением, в которых нет компьютеров и других эле-
ментов дискретного действия (микропроцессоров, логических интегральных схем). Микропроцессоры и компьютеры – это дискретные системы, поскольку в них вся инфор-
мация хранится и обрабатывается в дискретной форме. Компьютер не может обрабатывать непрерывные сигналы, поскольку работает только с последовательностями чисел. Примеры дискретных систем можно найти в экономике (период отсчета – квартал или год) и в биологии (модель «хищник-жертва»). Для их описания применяют разностные уравнения.
Существуют также и гибридные непрерывно-дискретные системы, например, компьютерные системы управления движущимися объектами (кораблями, самолетами, автомобилями и др.). В них часть элементов описывается дифференциальными уравнениями, а часть – разностными. С точки зрения математики это создает большие сложности для их исследования, поэтому во многих случаях непрерывно-дискретные системы сводят к упрощенным чисто непрерывным или чисто дискретным моделям.
1.3.4. Стационарные и нестационарные системы
Для управления очень важен вопрос о том, изменяются ли характеристики объекта со временем. Системы, в которых все параметры остаются постоянными, называются стационарными, что значит «не изменяющиеся во времени». В этом пособии рассматриваются только стационарные системы.
В практических задачах часто дело обстоит не так радужно. Например, летящая ракета расходует топливо и за счет этого ее масса изменяется. Таким образом, ракета – нестационарный объект. Системы, в которых параметры объекта или регулятора изменяются со временем, называются нестационарными. Хотя теория нестационарных систем существует (формулы написаны), применить ее на практике не так просто.
1.3.5. Определенность и случайность
Самый простой вариант – считать, что все параметры объекта определены (заданы) точно, так же, как и внешние воздействия. В этом случае мы говорим о детерминированных системах, которые рассматривались в классической теории управления.
Тем не менее, в реальных задачах точных данных у нас нет. Прежде всего, это относится к внешним воздействиям. Например, для исследования качки корабля на первом этапе можно считать, что волна имеет форму синуса известной амплитуды и частоты. Это детерминированная модель. Так ли это на практике? Естественно нет. С помощью такого подхода можно получить только приближенные, грубые результаты.
По современным представлениям форма волны приближенно описывается как сумма синусоид, которые имеют случайные, то есть неизвестные заранее, частоты, амплитуды и фазы. Помехи, шум измерений – это тоже случайные сигналы.
Системы, в которых действуют случайные возмущения или параметры объекта могут изменяться случайным образом, называются стохастическими (вероятностными). Теория стохастических систем позволяет получать только вероятностные результаты. Например, нельзя гарантировать, что отклонение корабля от курса всегда будет составлять не более 2°, но можно попытаться обеспечить такое отклонение с некоторой вероятностью (вероятность 99% означает, что требование будет выполнено в 99 случаях из 100).
1.3.6. Оптимальные системы
Часто требования к системе можно сформулировать в виде задачи оптимизации. В оптимальных системах регулятор строится так, чтобы обеспечить минимум или максимум какого-то критерия качества. Нужно помнить, что выражение «оптимальная система» не означает, что она действительно идеальная. Все определяется принятым критерием – если он выбран удачно, система получится хорошая, если нет – то наоборот.
8

© К.Ю. Поляков, 2008
1.3.7. Особые классы систем
Если параметры объекта или возмущений известны неточно или могут изменяться со временем (в нестационарных системах), применяют адаптивные или самонастраивающиеся регуляторы, в которых закон управления меняется при изменении условий. В простейшем случае (когда есть несколько заранее известных режимов работы) происходит простое переключение между несколькими законами управления. Часто в адаптивных системах регулятор оценивает параметры объекта в реальном времени и соответственно изменяет закон управления по заданному правилу.
Самонастраивающаяся система, которая пытается настроить регулятор так, чтобы «найти» максимум или минимум какого-то критерия качества, называется экстремальной (от слова экстремум, обозначающего максимум или минимум).
Во многих современных бытовых устройствах (например, в стиральных машинах) используются нечеткие регуляторы, построенные на принципах нечеткой логики. Этот подход позволяет формализовать человеческий способ принятия решения: «если корабль ушел сильно вправо, руль нужно сильно переложить влево».
Одно из популярных направлений в современной теории – применение достижений искусственного интеллекта для управления техническими системами. Регулятор строится (или только настраивается) на основе нейронной сети, которую предварительно обучает человекэксперт.
9
© К.Ю. Поляков, 2008
2. Математические модели
2.1. Что нужно знать для управления?
Цель любого управления – изменить состояние объекта нужным образом (в соответствии с заданием). Теория автоматического регулирования должна ответить на вопрос: «как построить регулятор, который может управлять данным объектом так, чтобы достичь цели?» Для этого разработчику необходимо знать, как система управления будет реагировать на разные воздействия, то есть нужна модель системы: объекта, привода, датчиков, каналов связи, возмущений, шумов.
Модель – это объект, который мы используем для изучения другого объекта (оригинала). Модель и оригинал должны быть в чем-то похожи, чтобы выводы, сделанные при изучении модели, можно было бы (с некоторой вероятностью) перенести на оригинал. Нас будут интересовать в первую очередь математические модели, выраженные в виде формул. Кроме того, в науке используются также описательные (словесные), графические, табличные и другие модели.
2.2. Связь входа и выхода
Любой объект взаимодействует с внешней средой с помощью входов и выходов. Входы – это возможные воздействия на объект, выходы – это те сигналы, которые можно измерить. Например, для электродвигателя входами могут быть напряжение питания и нагрузка, а выходами
– частота вращения вала, температура.
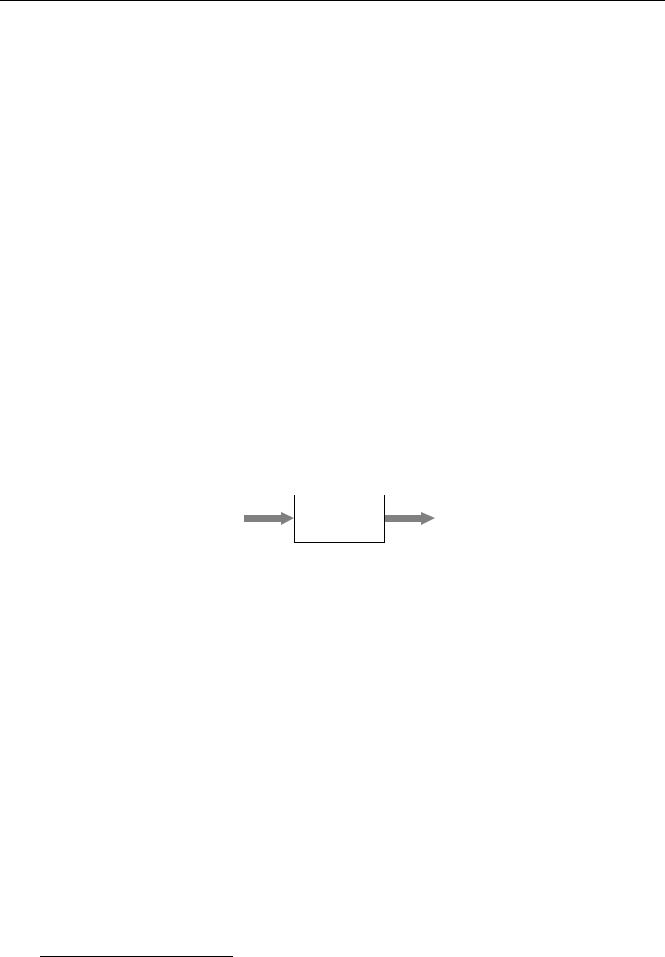
Входы независимы, они «приходят» из внешней среды. При изменении информации на входе меняется внутреннее состояние объекта (так называют его изменяющиеся свойства) и, как следствие, выходы:
вход x |
|
выход y |
|
U
Это значит, что существует некоторое правило, по которому элемент преобразует вход x в выход y. Это правило называется оператором. Запись y =U[x] означает, что выход y получен в
результате применения оператора U ко входу x.
Построить модель – это значит найти оператор, связывающий входы и выходы. С его помощью можно предсказать реакцию объекта на любой входной сигнал.
Рассмотрим электродвигатель постоянного тока. Вход этого объекта – это напряжение питания (в вольтах), выход – частота вращения (в оборотах в секунду). Будем считать, что при напряжении 1 В частота вращения равна 1 об/сек, а при напряжении 2 В – 2 об/сек, то есть частота вращения равна по величине напряжению1. Легко видеть, что действие такого оператора можно записать в виде
U[x] = x .
Теперь предположим, что этот же двигатель вращает колесо и в качестве выхода объекта мы выбрали число оборотов колеса относительно начального положения (в момент t = 0 ). В этом случае при равномерном вращении произведение x ∆t дает нам количество оборотов за время ∆t , то есть y(t) = x ∆t (здесь запись y(t) явно обозначает зависимость выхода от време-
ни t ). Можно ли считать, что этой формулой мы определили оператор U ? Очевидно, что нет, потому что полученная зависимость справедлива только для постоянного входного сигнала. Если напряжение на входе x(t) меняется (все равно как!), угол поворота запишется в виде инте-
грала
1 Конечно, это будет справедливо только в некотором диапазоне напряжений.
10